How to Use PIXHAWK 6C FC: Examples, Pinouts, and Specs
Introduction
The PIXHAWK 6C Flight Controller (FC), manufactured by Holybro, is an advanced autopilot system designed for drones and UAVs. It provides robust flight stabilization, multiple sensor inputs, and GPS support, making it ideal for a wide range of aerial applications. This flight controller is built on the PX4 open-source autopilot platform, ensuring flexibility and compatibility with various drone configurations.
Explore Projects Built with PIXHAWK 6C FC


Explore Projects Built with PIXHAWK 6C FC
Common Applications and Use Cases
- Multirotor drones for aerial photography and videography
- Fixed-wing UAVs for surveying and mapping
- VTOL (Vertical Take-Off and Landing) aircraft
- Research and development in autonomous flight systems
- Hobbyist and professional drone projects
Technical Specifications
The PIXHAWK 6C FC is equipped with high-performance hardware and versatile connectivity options. Below are the key technical details:
Key Technical Details
- Processor: STM32H743, 32-bit ARM Cortex-M7, 480 MHz
- IMU Sensors:
- ICM-42688-P (Accelerometer/Gyroscope)
- ICM-20649 (Accelerometer/Gyroscope)
- Barometer: MS5611
- GPS Support: External GPS module compatibility
- Input Voltage: 4.5V to 5.5V
- Power Consumption: ~1.5W
- Dimensions: 38.5mm x 55.5mm x 15.5mm
- Weight: 15g
- Firmware: PX4 Autopilot (pre-installed)
- Communication Interfaces:
- UART, I2C, CAN, SPI
- DSM/SBUS input for RC receivers
- PWM outputs for motor control
- Operating Temperature: -20°C to 60°C
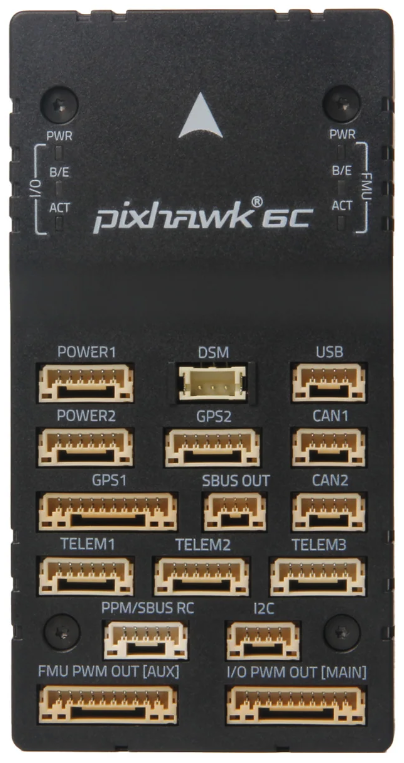
Pin Configuration and Descriptions
The PIXHAWK 6C FC features multiple connectors for peripherals and sensors. Below is the pin configuration:
Power and I/O Ports
| Port Name | Pin | Description |
|---|---|---|
| POWER1 | VCC | 5V input for powering the flight controller |
| GND | Ground | |
| POWER2 | VCC | Backup 5V input |
| GND | Ground |
Peripheral Ports
| Port Name | Pin | Description |
|---|---|---|
| GPS | TX, RX | UART interface for GPS communication |
| VCC, GND | Power and ground for GPS module | |
| I2C | SCL, SDA | I2C communication for external sensors |
| VCC, GND | Power and ground for I2C devices | |
| CAN | CAN_H, CAN_L | CAN bus communication |
| VCC, GND | Power and ground for CAN peripherals |
RC Input and PWM Output
| Port Name | Pin | Description |
|---|---|---|
| RC IN | SBUS/DSM | Input for RC receiver signal |
| PWM OUT | PWM1 - PWM8 | Outputs for motor ESCs or servos |
| VCC, GND | Power and ground for connected devices |
Usage Instructions
How to Use the PIXHAWK 6C FC in a Circuit
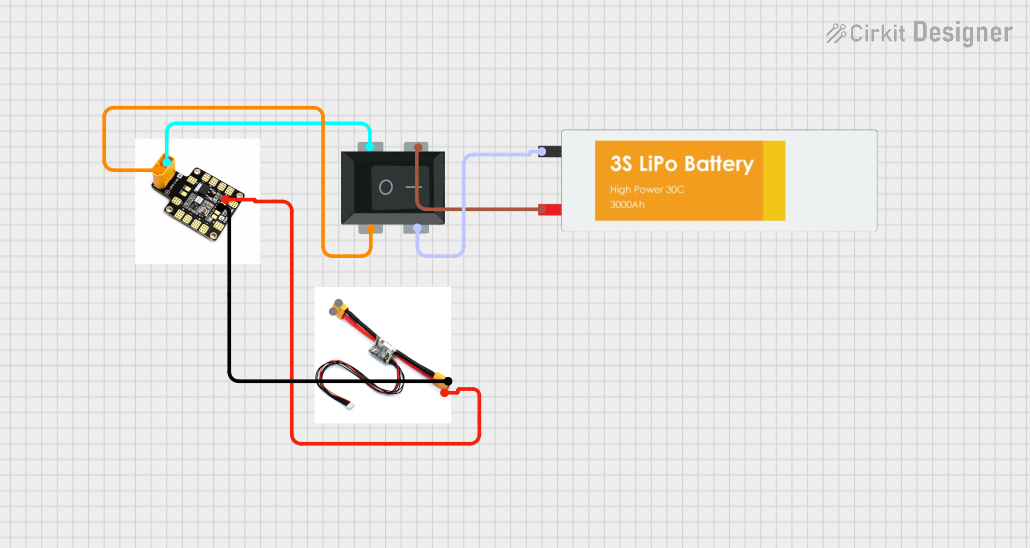
Powering the Flight Controller:
- Connect a 5V power source to the POWER1 or POWER2 port.
- Ensure the power source can supply sufficient current for the connected peripherals.
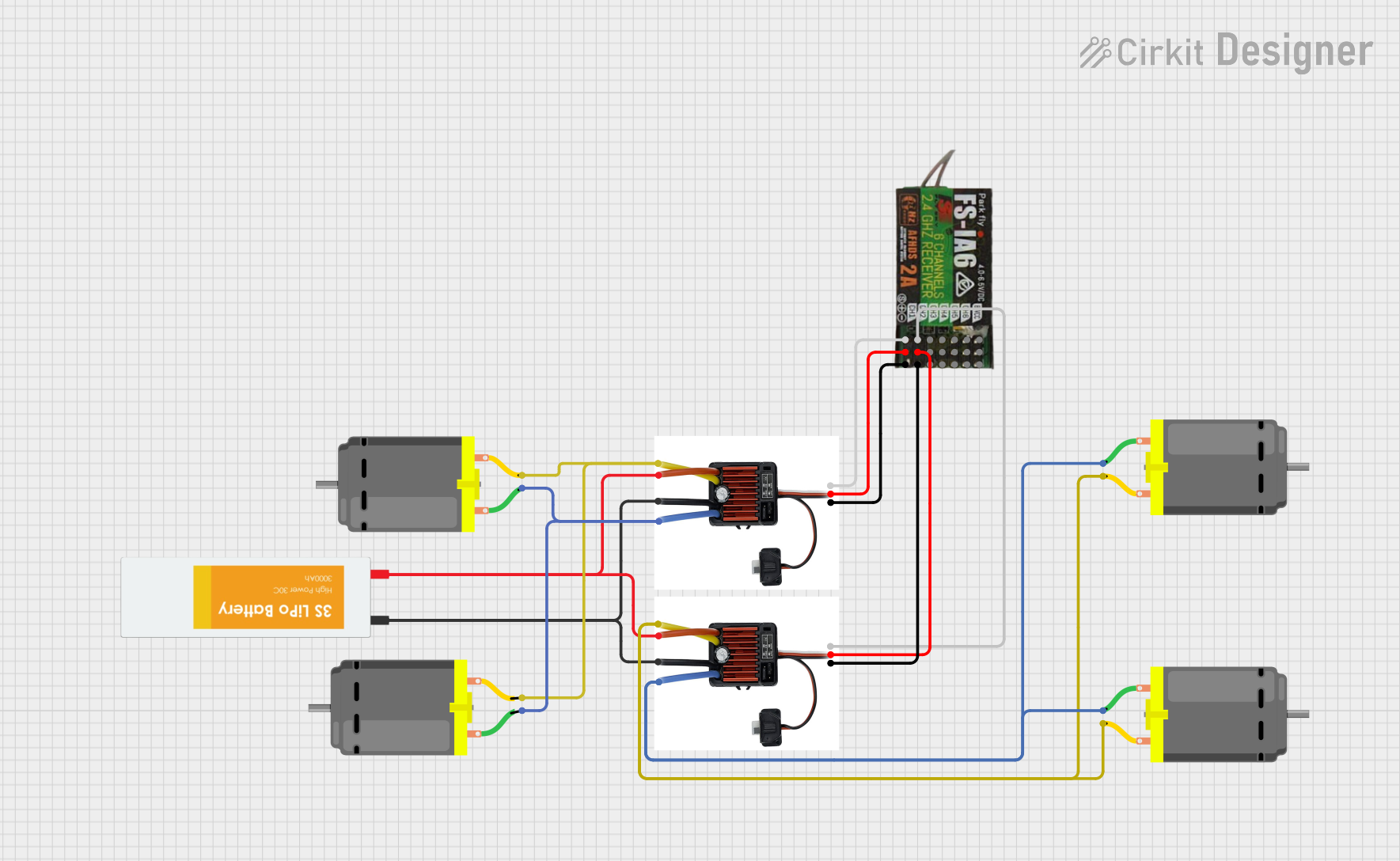
Connecting Peripherals:
- Attach a GPS module to the GPS port for navigation.
- Connect external sensors (e.g., LiDAR, magnetometer) to the I2C or CAN ports.
- Plug in the RC receiver to the RC IN port for manual control.
Motor and Servo Connections:
- Connect ESCs or servos to the PWM OUT ports.
- Ensure proper calibration of ESCs before flight.
Firmware Setup:
- Install the PX4 Ground Control Station (QGroundControl) software on your computer.
- Connect the PIXHAWK 6C FC to your computer via USB.
- Use QGroundControl to configure the flight controller, calibrate sensors, and upload mission plans.
Pre-Flight Checklist:
- Verify all connections are secure.
- Calibrate the accelerometer, gyroscope, and compass.
- Perform a motor test to ensure proper operation.
Important Considerations and Best Practices
- Use a high-quality power module to prevent voltage drops during operation.
- Ensure proper vibration isolation for the flight controller to avoid sensor interference.
- Regularly update the PX4 firmware to access the latest features and bug fixes.
- Perform a range test for the RC receiver before flying.
Example Code for Arduino UNO Integration
The PIXHAWK 6C FC can communicate with an Arduino UNO via the I2C interface. Below is an example code snippet for reading data from an I2C-connected sensor:
#include <Wire.h>
#define SENSOR_ADDRESS 0x68 // Replace with the I2C address of your sensor
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Initialize the sensor
Wire.beginTransmission(SENSOR_ADDRESS);
Wire.write(0x00); // Example: Write to a configuration register
Wire.endTransmission();
}
void loop() {
Wire.beginTransmission(SENSOR_ADDRESS);
Wire.write(0x01); // Example: Request data from a specific register
Wire.endTransmission();
Wire.requestFrom(SENSOR_ADDRESS, 2); // Request 2 bytes of data
if (Wire.available() == 2) {
int data = Wire.read() << 8 | Wire.read(); // Combine two bytes into one value
Serial.println(data); // Print the data to the serial monitor
}
delay(1000); // Wait 1 second before the next read
}
Troubleshooting and FAQs
Common Issues and Solutions
Flight Controller Not Powering On:
- Cause: Insufficient power supply.
- Solution: Verify the input voltage is within the 4.5V to 5.5V range. Check the power connections.
GPS Not Detected:
- Cause: Incorrect wiring or configuration.
- Solution: Ensure the GPS module is connected to the correct port. Verify the GPS settings in QGroundControl.
Unstable Flight:
- Cause: Improper sensor calibration or vibration interference.
- Solution: Recalibrate the accelerometer, gyroscope, and compass. Use vibration-damping mounts for the flight controller.
No RC Signal:
- Cause: RC receiver not bound or connected properly.
- Solution: Bind the RC receiver to the transmitter. Check the connection to the RC IN port.
FAQs
Q: Can I use the PIXHAWK 6C FC with ArduPilot firmware?
A: Yes, the PIXHAWK 6C FC is compatible with both PX4 and ArduPilot firmware.Q: What is the maximum number of motors supported?
A: The PIXHAWK 6C FC supports up to 8 motors via the PWM OUT ports.Q: Does the flight controller support telemetry?
A: Yes, telemetry can be enabled via UART or CAN interfaces.Q: Can I use this flight controller for a fixed-wing aircraft?
A: Yes, the PIXHAWK 6C FC is suitable for fixed-wing, multirotor, and VTOL configurations.