How to Use VNH2SP30: Examples, Pinouts, and Specs
Introduction
The VNH2SP30 is a full-bridge motor driver integrated circuit (IC) designed for driving high-power DC motors. It is capable of delivering a continuous current of up to 14A and can handle peak currents up to 30A. This IC is well-suited for applications in robotics, automotive, and industrial automation where precise and efficient motor control is required. Its built-in protection features make it a robust and reliable choice for engineers and hobbyists alike.
Explore Projects Built with VNH2SP30
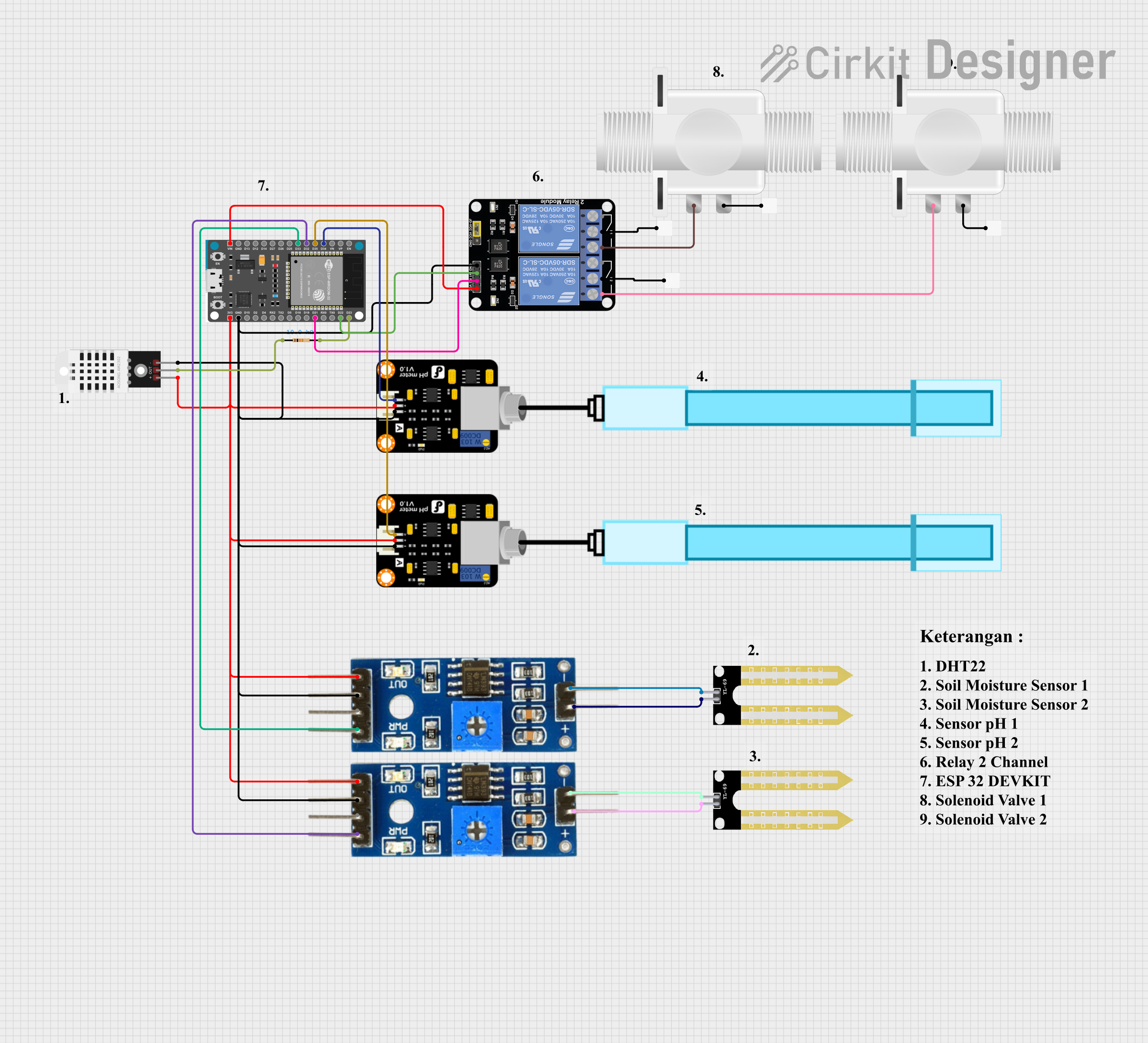
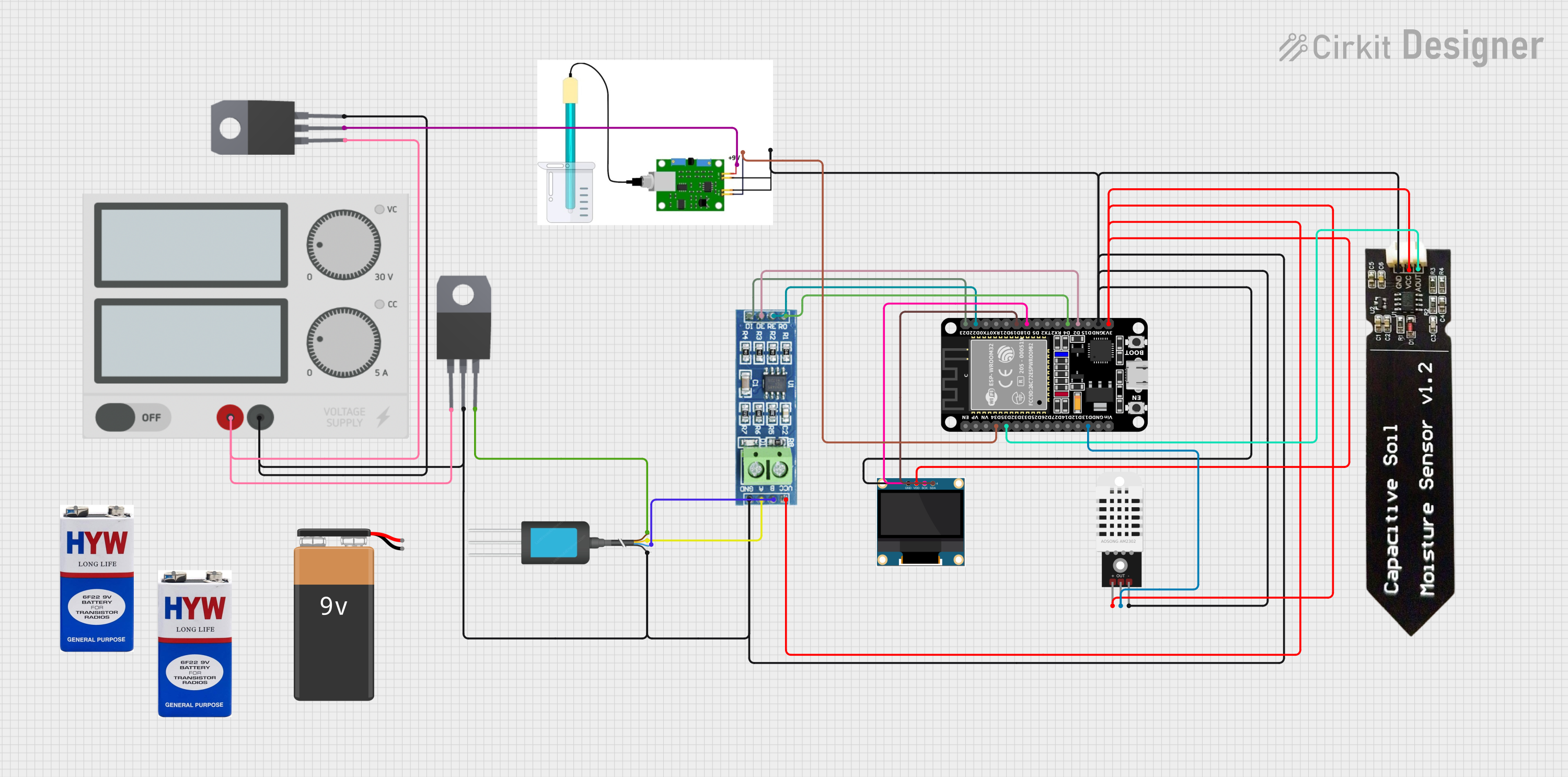
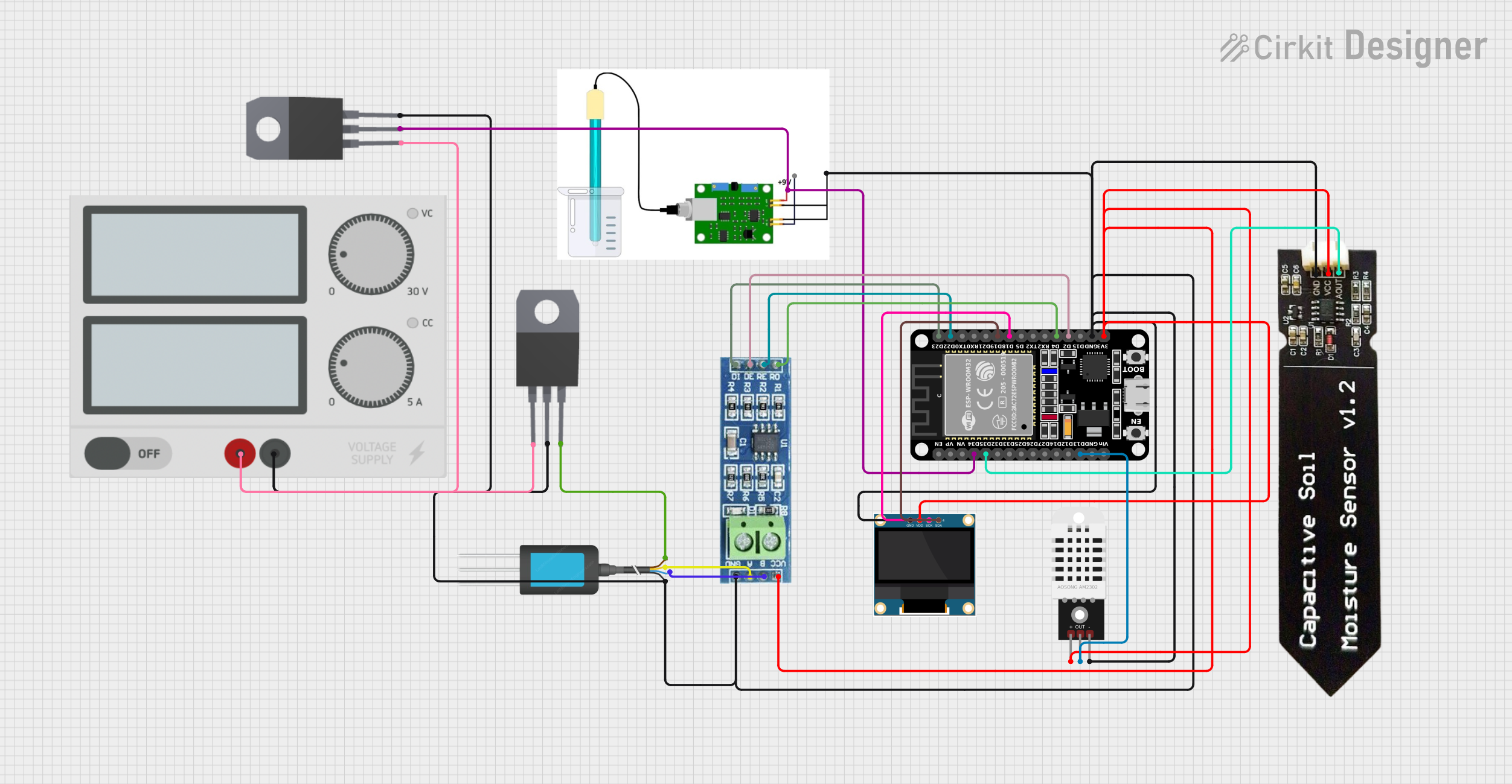
Explore Projects Built with VNH2SP30
Common Applications and Use Cases
- Robotic vehicles and arms
- Automotive electronic throttle control
- Industrial automation systems
- High-power DC motor control applications
Technical Specifications
Key Technical Details
- Motor Supply Voltage (Vcc): 5.5V to 16V
- Logic Supply Voltage (Vss): 2.5V to 5.5V
- Continuous Output Current (Iout): 14A
- Peak Output Current (Ipeak): 30A (for a few milliseconds)
- PWM Frequency: Up to 20 kHz
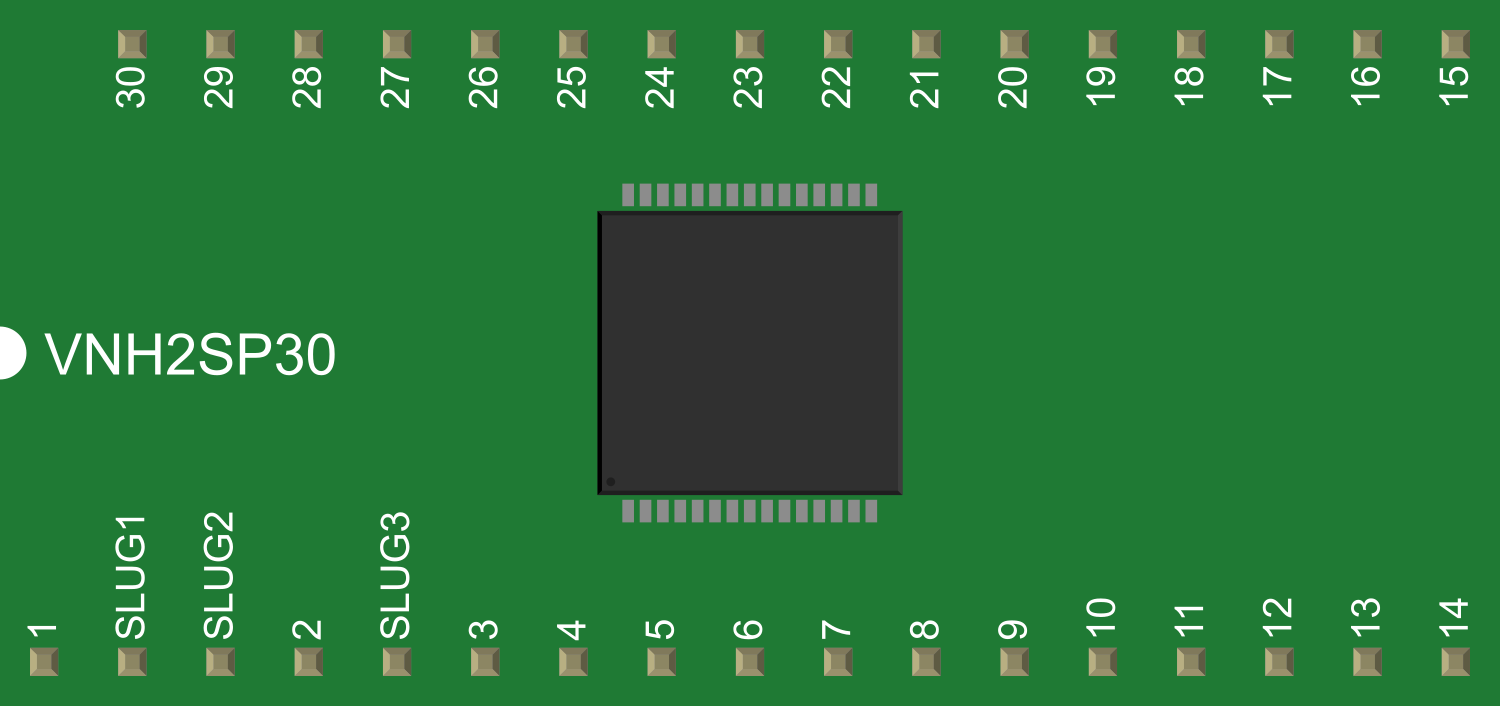
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | Vcc | Motor power supply (5.5V to 16V) |
| 2 | GND | Ground connection |
| 3 | INA | Input A for PWM and direction control |
| 4 | INB | Input B for PWM and direction control |
| 5 | PWM | Pulse Width Modulation input |
| 6 | CS | Current sense analog output |
| 7 | EN | Enable input (active high) |
| 8 | DIAGA | Diagnostic output A |
| 9 | DIAGB | Diagnostic output B |
Usage Instructions
How to Use the Component in a Circuit
- Power Connections: Connect the motor supply voltage (Vcc) to pin 1 and ground (GND) to pin 2.
- Control Inputs: Connect INA and INB (pins 3 and 4) to your microcontroller or control circuit to set the motor direction.
- PWM Input: Apply a PWM signal to the PWM pin (pin 5) to control the speed of the motor.
- Enable Pin: Set the EN pin (pin 7) high to enable the driver.
- Current Sensing: The CS pin (pin 6) provides an analog voltage proportional to the motor current.
- Diagnostics: DIAGA and DIAGB (pins 8 and 9) can be used to monitor the status of the driver and motor.
Important Considerations and Best Practices
- Ensure that the power supply voltage does not exceed the maximum rating of 16V.
- Use a proper heat sink to dissipate heat during high current operation.
- Implement flyback diodes on the motor terminals if inductive loads are used.
- Avoid running the motor driver at its peak current rating for extended periods to prevent thermal shutdown.
- Use short and thick wires for motor connections to minimize voltage drops and power losses.
Troubleshooting and FAQs
Common Issues Users Might Face
- Motor not running: Check power supply connections, ensure the EN pin is set high, and verify that the PWM signal is being applied.
- Overheating: Make sure a heat sink is attached and that the current does not exceed the continuous rating for extended periods.
- Erratic motor behavior: Confirm that the input signals (INA, INB, PWM) are clean and without noise.
Solutions and Tips for Troubleshooting
- Double-check wiring and solder joints for any loose connections or shorts.
- Use an oscilloscope to examine the control signals for integrity.
- Ensure that the power supply is capable of delivering the required current for your motor.
FAQs
Q: Can I drive two motors with one VNH2SP30? A: No, the VNH2SP30 is designed to drive one motor. For two motors, you would need two ICs.
Q: What is the maximum PWM frequency I can use? A: The VNH2SP30 can handle PWM frequencies up to 20 kHz.
Q: How do I use the current sense feature? A: The CS pin outputs an analog voltage proportional to the motor current. You can read this voltage with an ADC to monitor the current draw.
Example Code for Arduino UNO
// Define control pins for VNH2SP30
const int inAPin = 2; // INA pin
const int inBPin = 3; // INB pin
const int pwmPin = 5; // PWM pin
const int enPin = 4; // Enable pin
void setup() {
// Set control pins as outputs
pinMode(inAPin, OUTPUT);
pinMode(inBPin, OUTPUT);
pinMode(pwmPin, OUTPUT);
pinMode(enPin, OUTPUT);
// Enable the motor driver
digitalWrite(enPin, HIGH);
}
void loop() {
// Set motor direction to forward
digitalWrite(inAPin, HIGH);
digitalWrite(inBPin, LOW);
// Set motor speed (PWM value 0 to 255)
analogWrite(pwmPin, 128); // 50% duty cycle
// Add a delay to see the motor in action
delay(2000);
// Change motor direction to reverse
digitalWrite(inAPin, LOW);
digitalWrite(inBPin, HIGH);
// Keep the same motor speed
delay(2000);
}
Remember to adjust the PWM value to control the speed of the motor and ensure that the control signals do not exceed the logic supply voltage (Vss) limits.