How to Use Line Tracking Sensor: Examples, Pinouts, and Specs
Introduction
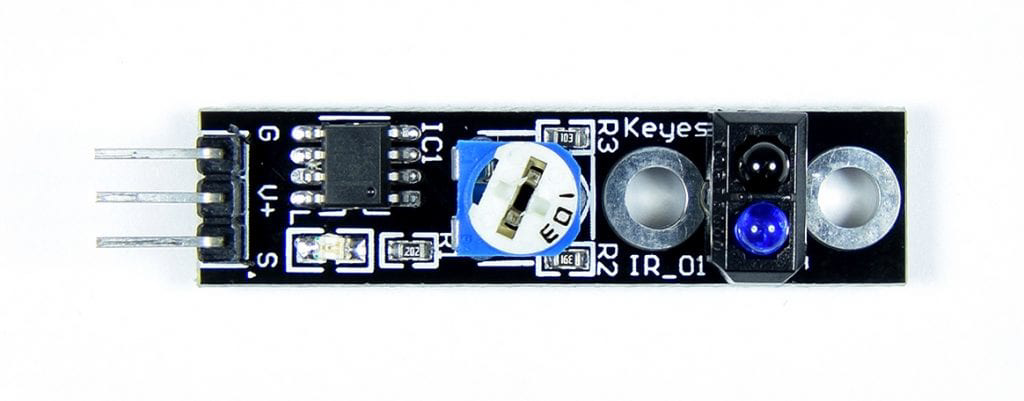
The Line Tracking Sensor, model KY-033, is an electronic component designed for robotics and automation applications. It is capable of detecting and following lines or tracks marked on a surface, which is particularly useful for line-following robots and navigational aids. The sensor uses an infrared light emitter and receiver to detect the reflectivity of the surface beneath it, allowing it to distinguish between the line and the surrounding area.
Explore Projects Built with Line Tracking Sensor
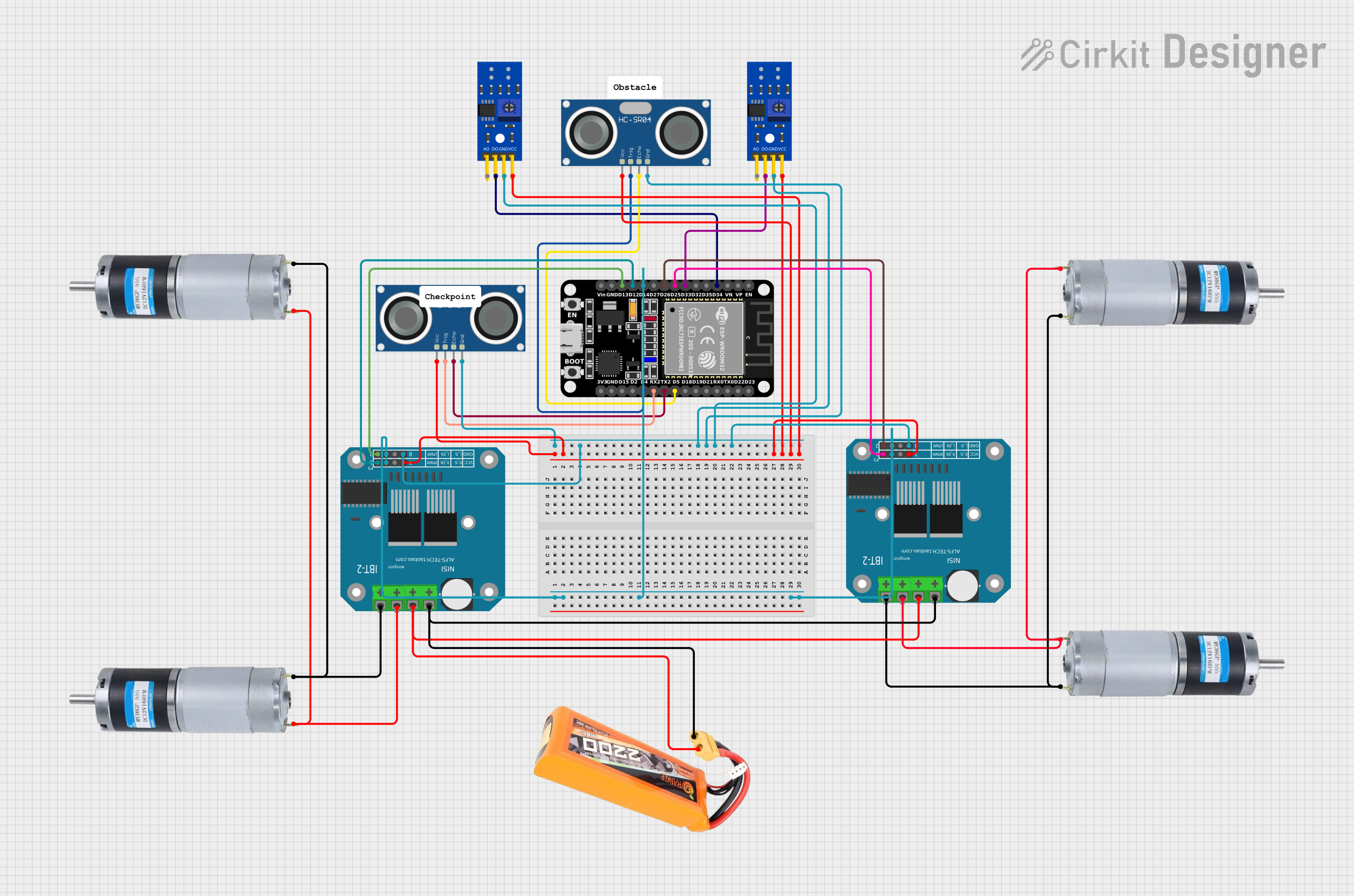
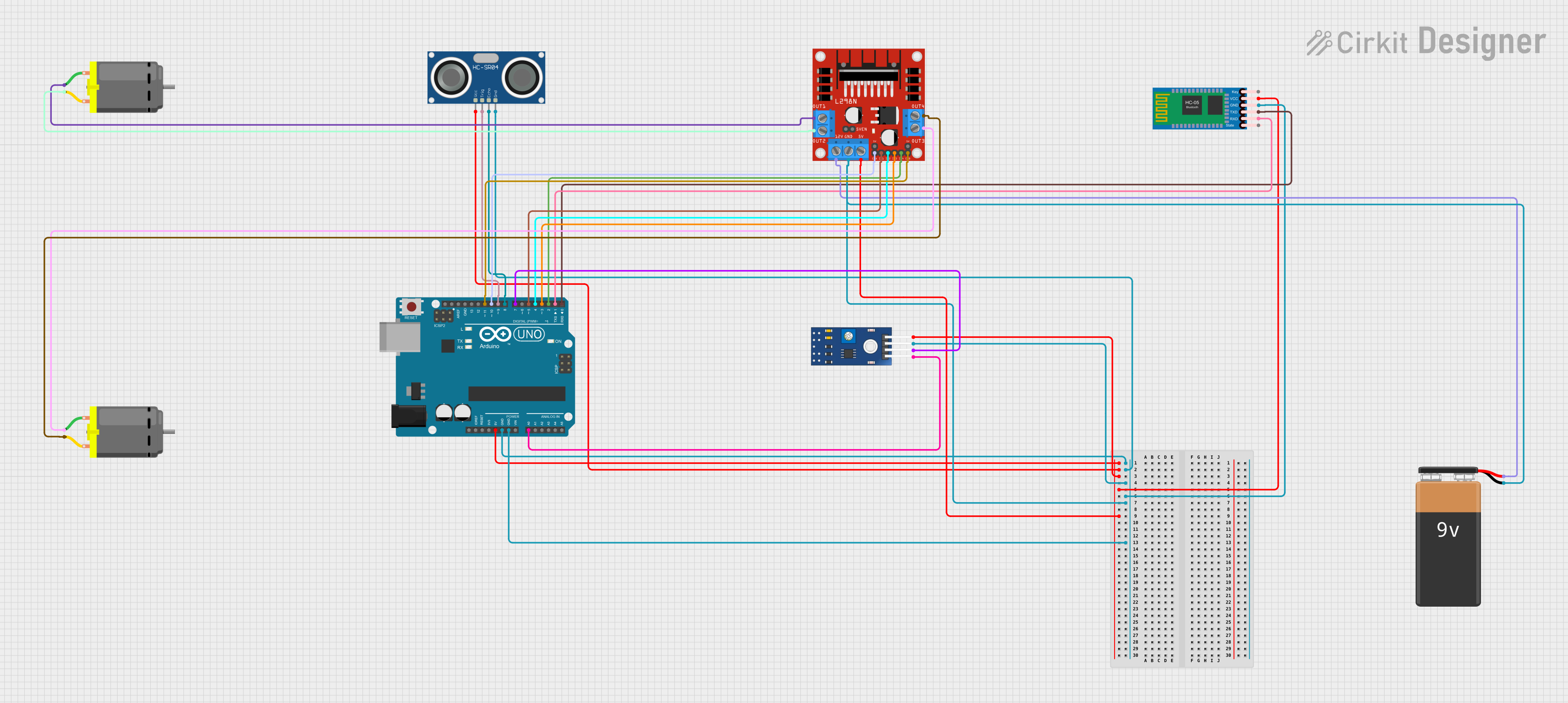

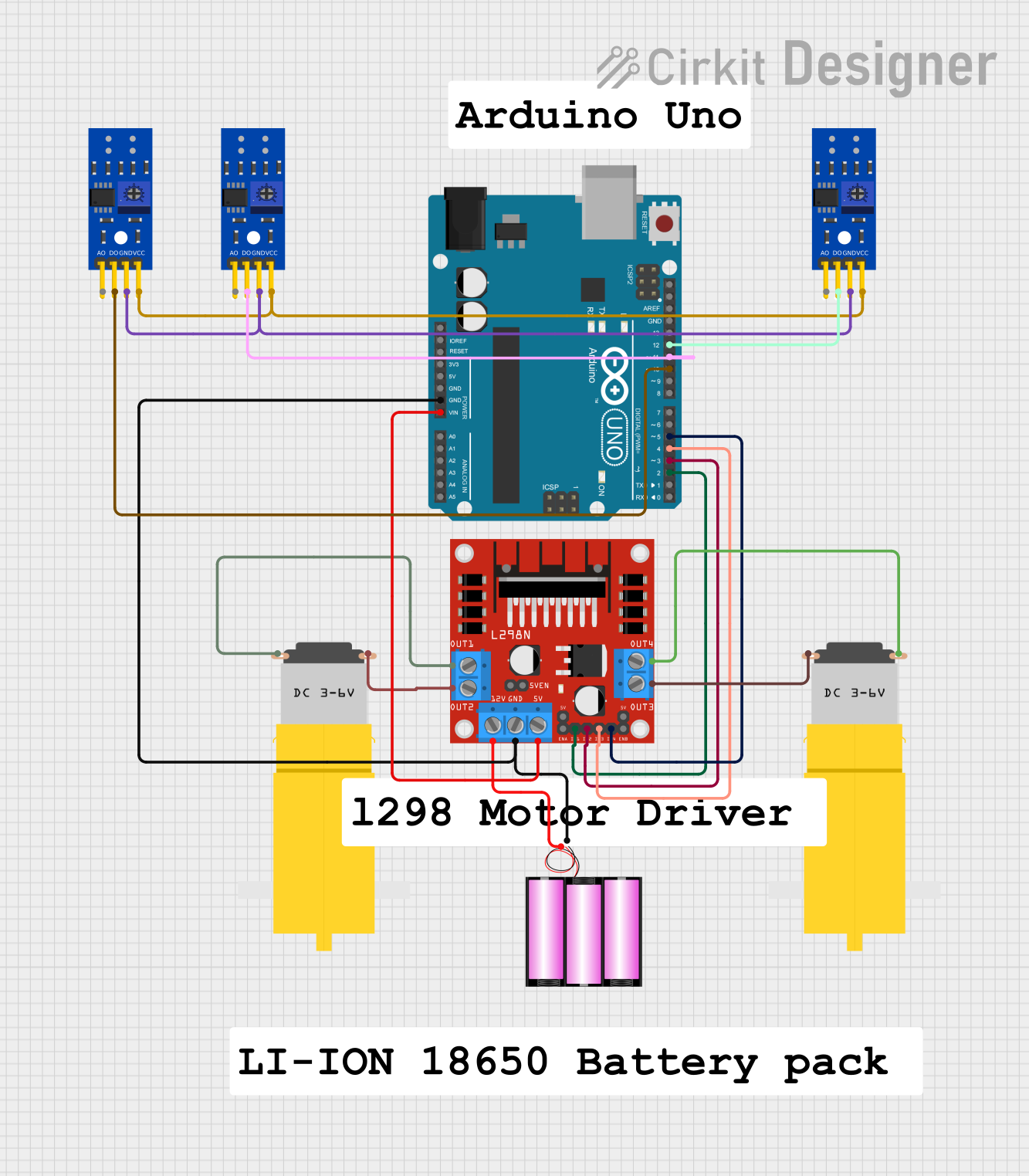
Explore Projects Built with Line Tracking Sensor
Common Applications and Use Cases
- Line-following robots
- Automated guided vehicles (AGVs)
- Positioning and alignment systems
- Edge detection for moving platforms
Technical Specifications
Key Technical Details
- Operating Voltage: 3.3V to 5V DC
- Output Type: Digital signal
- Detection Distance: 2mm to 10mm
- Operating Current: 20mA (typical)
- Ambient Light Resistance: Good
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V to 5V DC) |
| 2 | GND | Ground connection |
| 3 | DO | Digital output signal |
Usage Instructions
How to Use the Component in a Circuit
- Connect the VCC pin to the power supply (3.3V to 5V).
- Connect the GND pin to the ground of the power supply.
- Connect the DO pin to a digital input pin on a microcontroller, such as an Arduino UNO.
Important Considerations and Best Practices
- Ensure that the surface and the line have a high contrast for optimal detection.
- Avoid exposing the sensor to direct sunlight or other strong infrared sources.
- Adjust the detection distance by tuning the onboard potentiometer if necessary.
- Use a pull-up resistor if the microcontroller input pin is not internally pulled up.
Example Code for Arduino UNO
// Define the digital input pin where the sensor's DO pin is connected
const int lineSensorPin = 2;
void setup() {
// Initialize the lineSensorPin as an input
pinMode(lineSensorPin, INPUT);
// Begin serial communication at a baud rate of 9600
Serial.begin(9600);
}
void loop() {
// Read the digital value from the line sensor
int lineState = digitalRead(lineSensorPin);
// Print the state of the line sensor: 0 for line detected, 1 for no line
Serial.println(lineState);
// A short delay before the next reading
delay(100);
}
Troubleshooting and FAQs
Common Issues Users Might Face
- Sensor not detecting line: Ensure that the line is within the specified detection distance and has sufficient contrast.
- Fluctuating readings: Stabilize the power supply and avoid electrical noise. Also, check for loose connections.
- No output signal: Verify that the sensor is correctly powered and that the DO pin is properly connected to the microcontroller.
Solutions and Tips for Troubleshooting
- Adjust the onboard potentiometer to calibrate the detection threshold.
- Test the sensor with different line colors and widths to determine the optimal conditions.
- Ensure that the sensor is mounted at a consistent height from the surface for reliable detection.
FAQs
Q: Can the sensor detect any color line? A: The sensor is best at detecting lines that have a high contrast with the background, typically black on a white surface.
Q: What is the maximum detection distance? A: The maximum recommended detection distance is 10mm, but it can vary based on the surface and line properties.
Q: How can I adjust the sensitivity of the sensor? A: The sensitivity can be adjusted using the onboard potentiometer. Turn it clockwise to increase sensitivity and counterclockwise to decrease it.
Q: Is the sensor waterproof? A: No, the KY-033 Line Tracking Sensor is not waterproof and should be protected from moisture and water splashes.
For further assistance, please refer to the manufacturer's datasheet or contact technical support.