How to Use Tofsense-M LIDAR: Examples, Pinouts, and Specs

Introduction
The Tofsense-M LIDAR, manufactured by Nooploop, is a compact and high-performance Time-of-Flight (ToF) sensor designed for precise distance measurement and 3D mapping. By emitting light pulses and calculating the time it takes for the light to return after hitting an object, the Tofsense-M provides accurate and reliable distance data. Its small size, low power consumption, and high resolution make it ideal for applications in robotics, drones, autonomous vehicles, industrial automation, and smart devices.
Explore Projects Built with Tofsense-M LIDAR
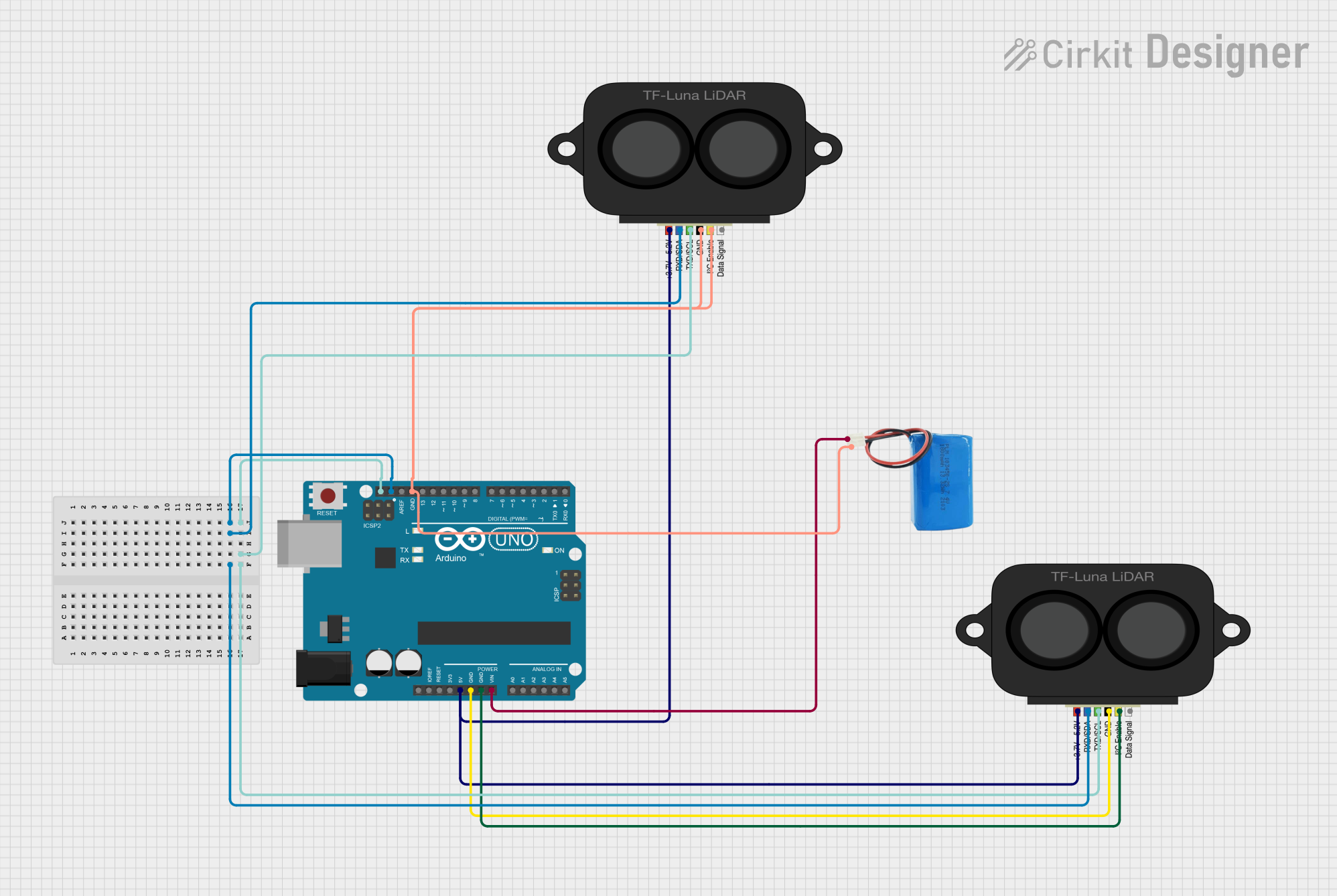
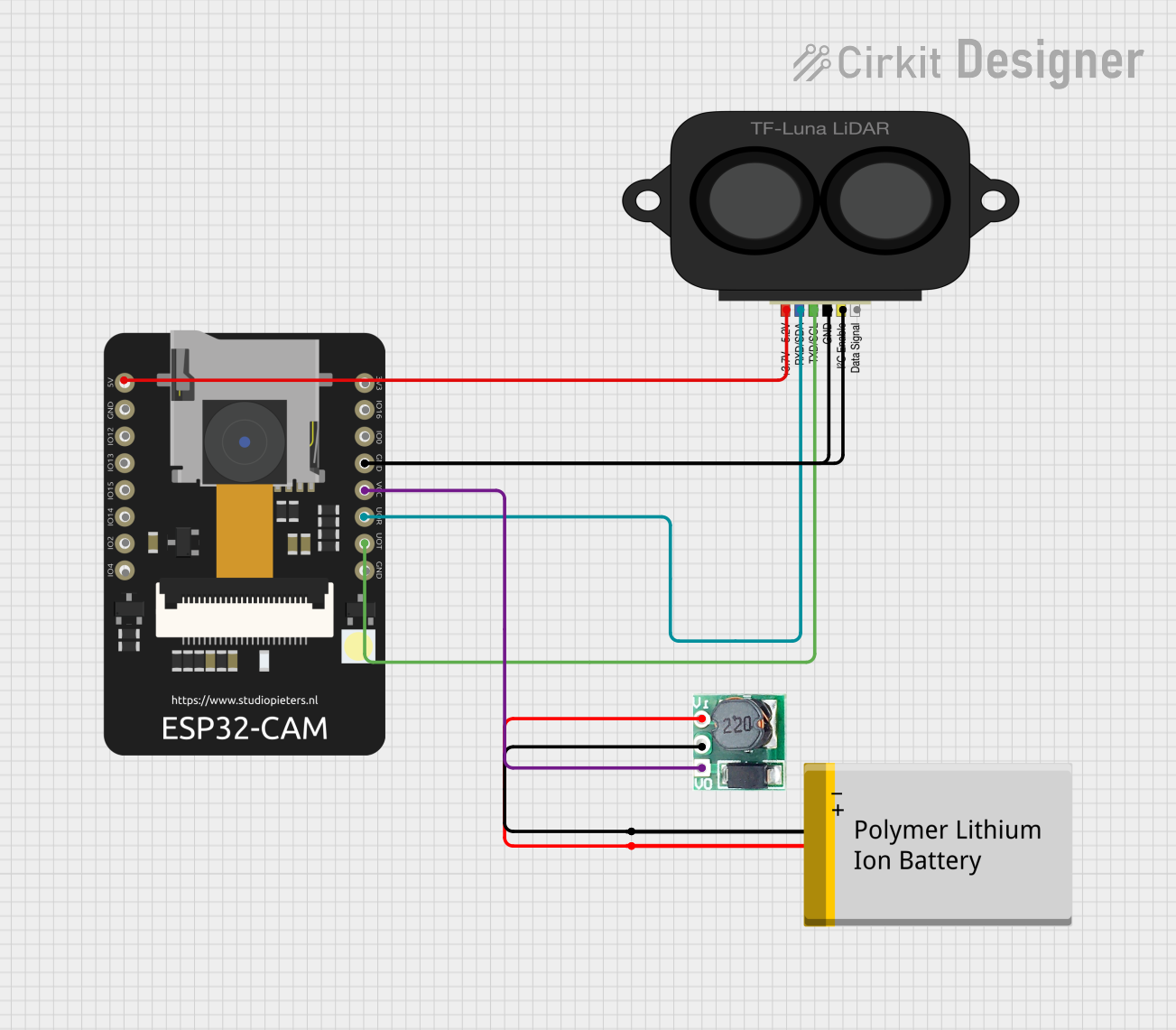
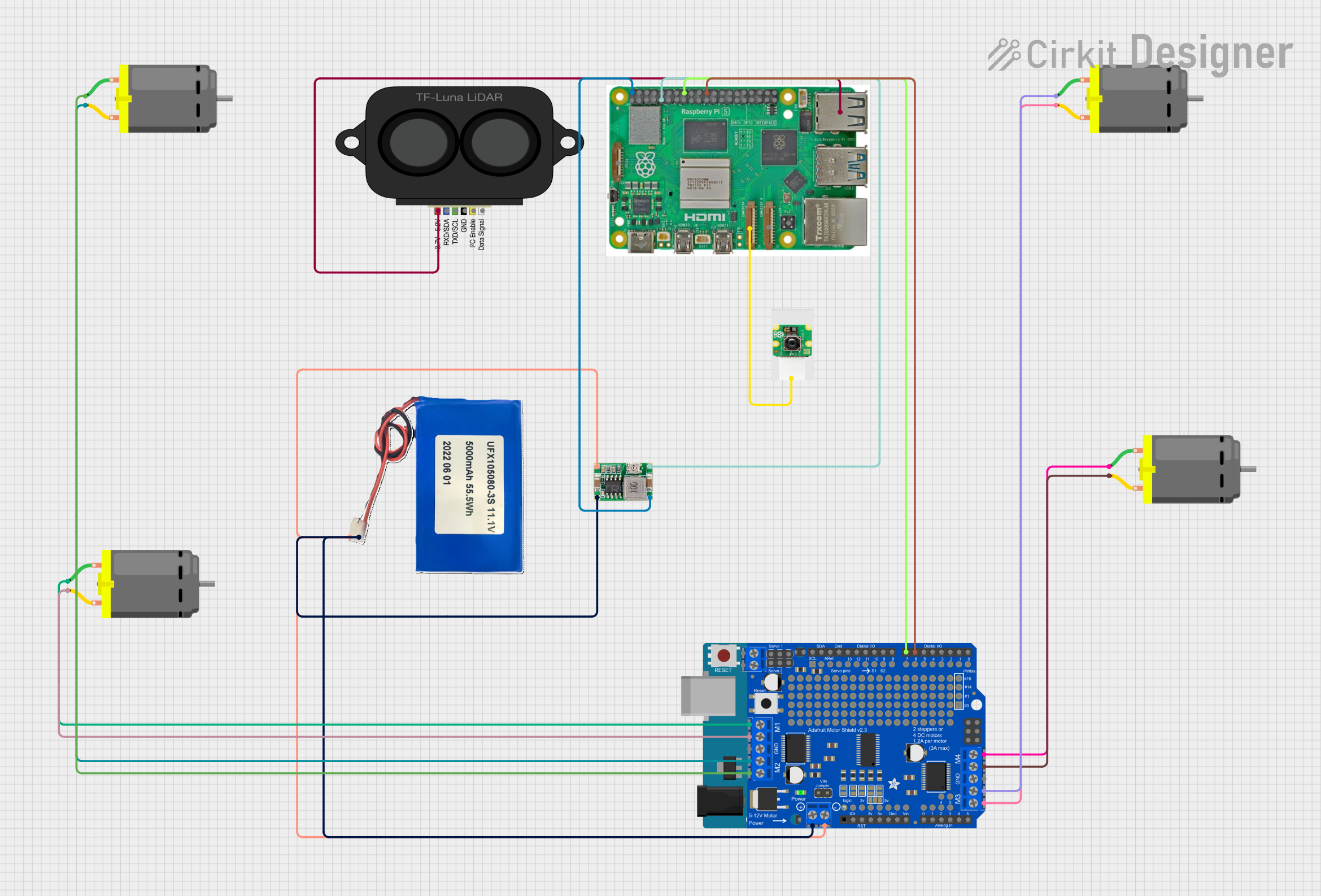
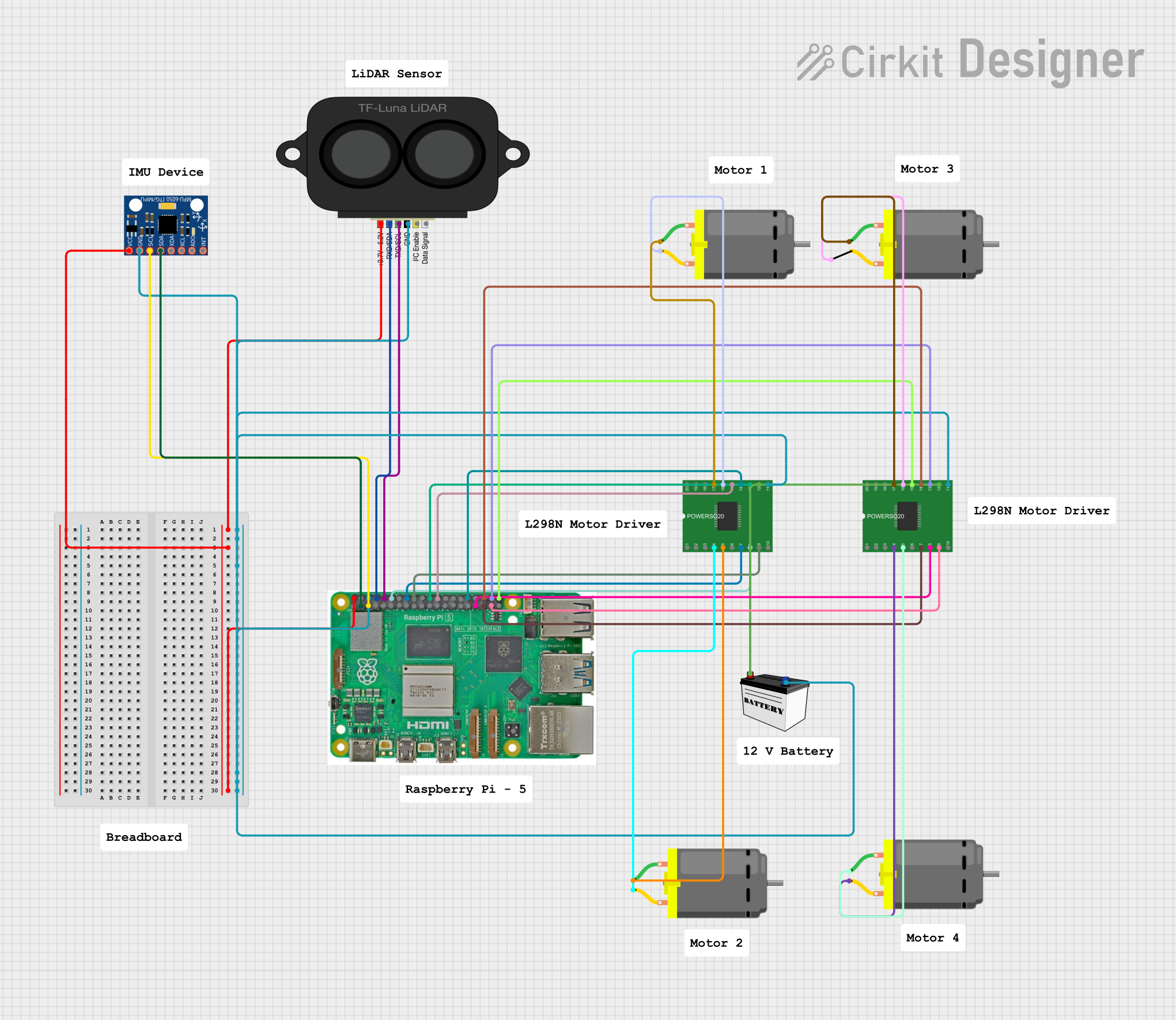
Explore Projects Built with Tofsense-M LIDAR
Common Applications
- Obstacle detection and avoidance in robotics and drones
- 3D mapping and environmental scanning
- Industrial automation and object positioning
- Smart home devices for motion detection and presence sensing
- Autonomous vehicle navigation and collision avoidance
Technical Specifications
The Tofsense-M LIDAR is designed to deliver high accuracy and performance in a variety of environments. Below are its key technical specifications:
| Parameter | Specification |
|---|---|
| Measurement Range | 0.1 m to 6 m |
| Accuracy | ±2 cm |
| Resolution | 1 mm |
| Field of View (FoV) | 27° |
| Operating Voltage | 5 V DC |
| Power Consumption | ≤ 0.5 W |
| Communication Interface | UART (3.3V TTL) |
| Operating Temperature | -10°C to 60°C |
| Dimensions | 30 mm × 30 mm × 12 mm |
| Weight | 10 g |
Pin Configuration
The Tofsense-M LIDAR features a 4-pin interface for power and communication. The pinout is as follows:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (5 V DC) |
| 2 | GND | Ground |
| 3 | TX | UART Transmit (3.3V TTL) |
| 4 | RX | UART Receive (3.3V TTL) |
Usage Instructions
Connecting the Tofsense-M LIDAR
To use the Tofsense-M LIDAR in a circuit, follow these steps:
- Connect the VCC pin to a 5V power source.
- Connect the GND pin to the ground of your circuit.
- Connect the TX pin of the Tofsense-M to the RX pin of your microcontroller (e.g., Arduino UNO).
- Connect the RX pin of the Tofsense-M to the TX pin of your microcontroller.
Important Considerations
- Ensure that the UART communication voltage level is 3.3V. If your microcontroller operates at 5V logic, use a level shifter to avoid damaging the sensor.
- Avoid exposing the sensor to direct sunlight or highly reflective surfaces, as this may affect measurement accuracy.
- Mount the sensor securely to minimize vibrations, which can interfere with readings.
Example Code for Arduino UNO
Below is an example Arduino sketch to interface with the Tofsense-M LIDAR and read distance data:
#include <SoftwareSerial.h>
// Define the RX and TX pins for SoftwareSerial
SoftwareSerial lidarSerial(10, 11); // RX = Pin 10, TX = Pin 11
void setup() {
Serial.begin(9600); // Initialize Serial Monitor at 9600 baud
lidarSerial.begin(115200); // Initialize LIDAR communication at 115200 baud
Serial.println("Tofsense-M LIDAR Initialized");
}
void loop() {
if (lidarSerial.available()) { // Check if data is available from the LIDAR
String distanceData = ""; // Variable to store the received data
while (lidarSerial.available()) {
char c = lidarSerial.read(); // Read each character from the LIDAR
distanceData += c; // Append the character to the data string
}
Serial.print("Distance: "); // Print the distance data to the Serial Monitor
Serial.println(distanceData);
}
delay(100); // Add a small delay to avoid flooding the Serial Monitor
}
Notes on the Code
- The
SoftwareSeriallibrary is used to communicate with the Tofsense-M LIDAR on pins 10 and 11 of the Arduino UNO. - Ensure the LIDAR's baud rate matches the one specified in the code (115200 in this case).
- Use the Serial Monitor to view the distance data in real time.
Troubleshooting and FAQs
Common Issues
No Data Received from the Sensor
- Verify the wiring connections, especially the TX and RX pins.
- Ensure the baud rate in your code matches the LIDAR's default baud rate (115200).
- Check if the sensor is powered correctly (5V on the VCC pin).
Inaccurate or Fluctuating Measurements
- Avoid placing the sensor near highly reflective or transparent surfaces.
- Ensure the sensor is mounted securely to reduce vibrations.
- Check for obstructions in the sensor's field of view.
Communication Errors
- If using a 5V microcontroller, ensure a level shifter is used for the UART pins.
- Verify that the UART pins are not swapped (TX to RX and RX to TX).
FAQs
Q: Can the Tofsense-M LIDAR measure distances beyond 6 meters?
A: No, the maximum measurement range of the Tofsense-M is 6 meters. For longer ranges, consider other LIDAR models.
Q: Is the Tofsense-M suitable for outdoor use?
A: The Tofsense-M can operate in outdoor environments, but direct sunlight or extreme temperatures may affect its performance.
Q: Can I use multiple Tofsense-M sensors in the same system?
A: Yes, but ensure each sensor has a unique communication channel or address to avoid conflicts.
By following this documentation, you can effectively integrate the Tofsense-M LIDAR into your projects and troubleshoot common issues with ease.