How to Use encoder_775: Examples, Pinouts, and Specs
Introduction
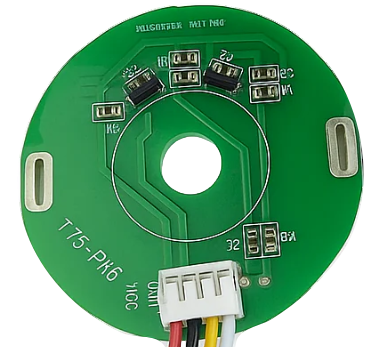
The Encoder 775 is a type of rotary encoder designed to provide precise feedback on the position and speed of a motor. It is commonly used in applications requiring accurate motor control, such as robotics, CNC machines, and industrial automation systems. With its high resolution and robust design, the Encoder 775 is ideal for environments where precision and reliability are critical.
Explore Projects Built with encoder_775
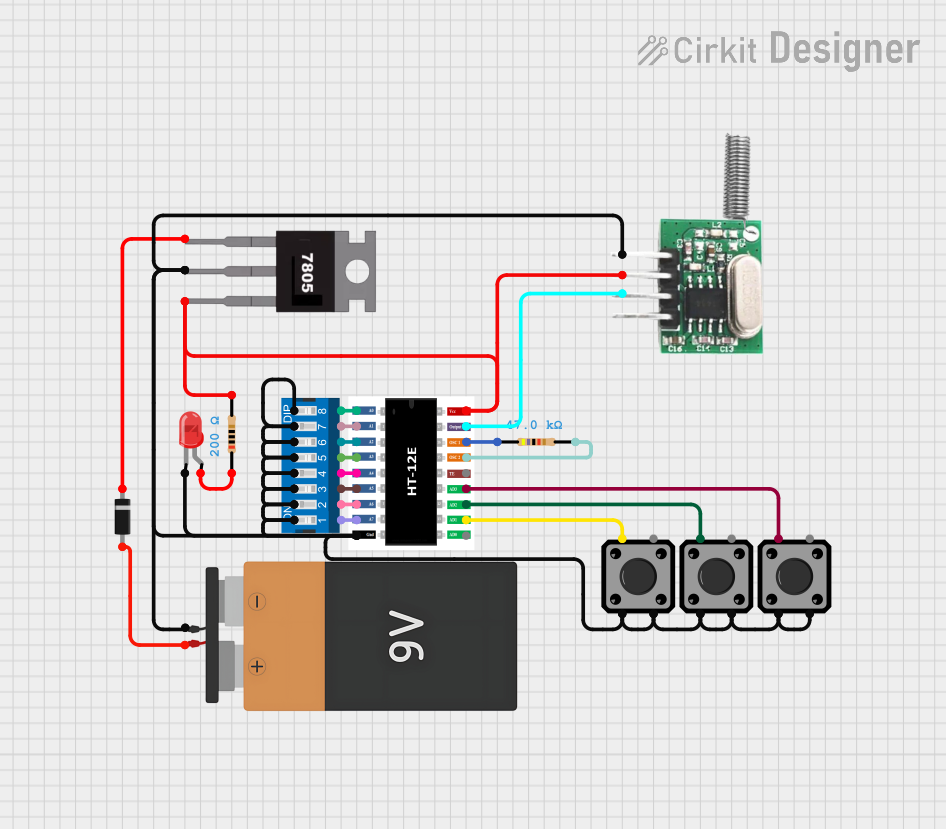
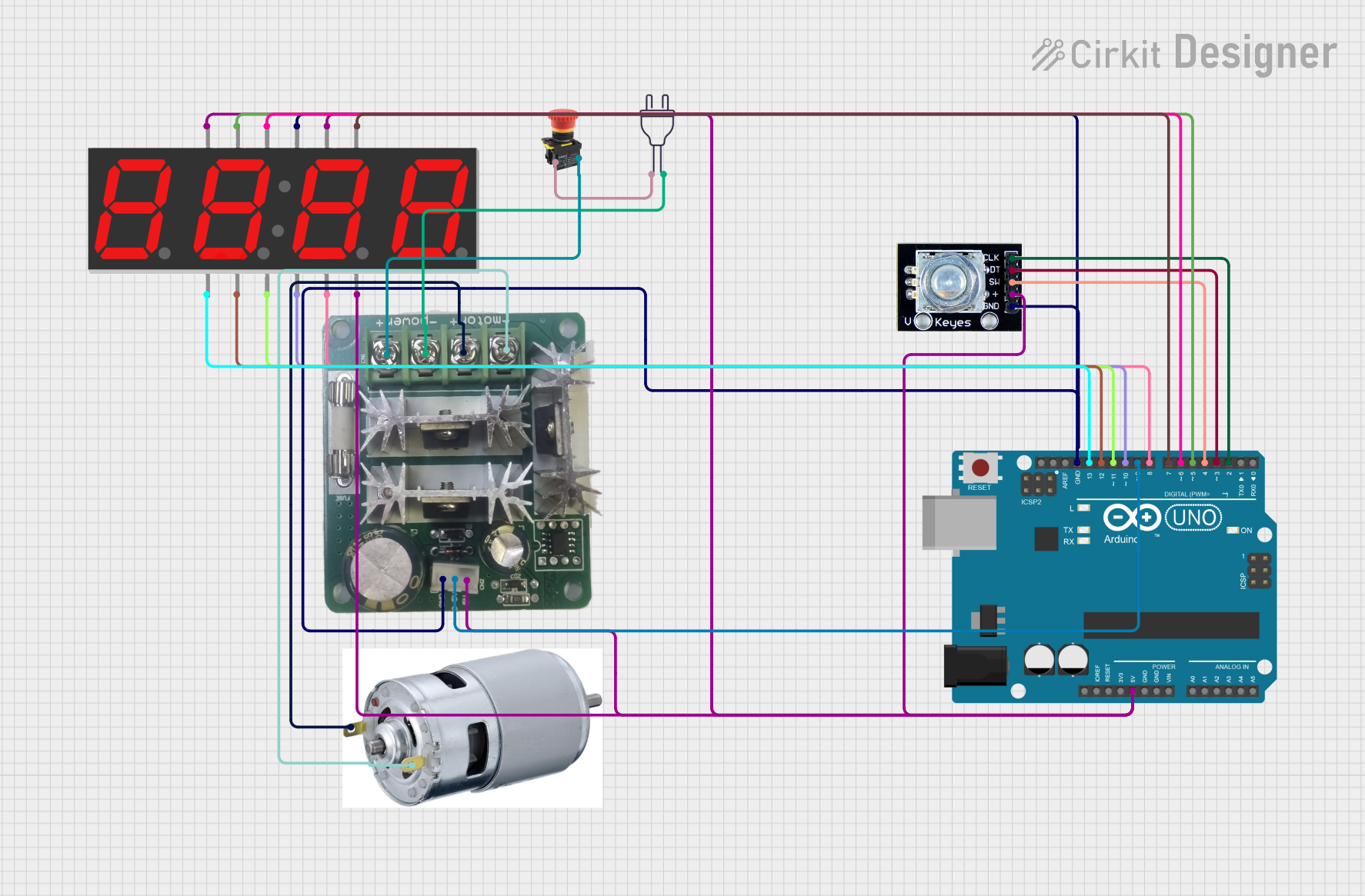
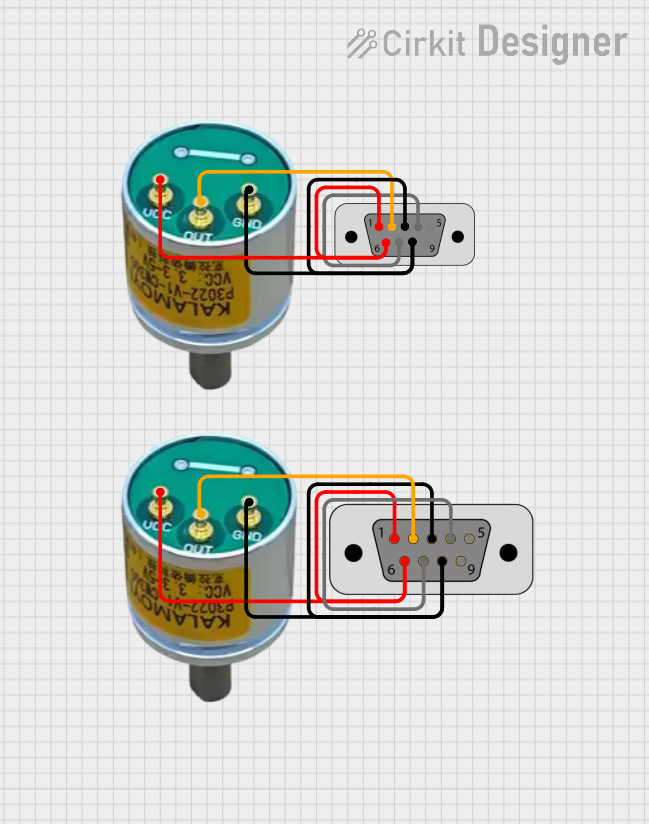
Explore Projects Built with encoder_775
Common Applications:
- Robotics for motor position and speed control
- CNC machines for precise axis movement
- Conveyor systems in industrial automation
- Electric vehicles for motor feedback
- 3D printers for accurate stepper motor control
Technical Specifications
Below are the key technical details of the Encoder 775:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V DC |
| Output Signal Type | Quadrature (A and B channels) |
| Resolution | Up to 1024 pulses per revolution (PPR) |
| Maximum Rotational Speed | 5000 RPM |
| Output Signal Voltage | 0V (Low) to 5V (High) |
| Operating Temperature | -20°C to 85°C |
| Connector Type | 4-pin or 6-pin JST |
Pin Configuration
The Encoder 775 typically has the following pin configuration:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (5V DC) |
| 2 | GND | Ground |
| 3 | A | Channel A output signal |
| 4 | B | Channel B output signal |
| 5 (optional) | Z | Index pulse (optional, for some models) |
| 6 (optional) | NC | No connection (varies by model) |
Usage Instructions
How to Use the Encoder 775 in a Circuit
- Power the Encoder: Connect the VCC pin to a 5V DC power source and the GND pin to the ground of your circuit.
- Connect Signal Pins:
- Connect the A and B pins to the input pins of a microcontroller or motor driver.
- If your encoder has an optional Z pin, connect it if you need an index pulse for absolute positioning.
- Read the Signals: Use a microcontroller to read the quadrature signals (A and B) to determine the direction and speed of rotation.
Important Considerations:
- Debouncing: Use software or hardware debouncing to filter out noise in the encoder signals.
- Pull-up Resistors: Some encoders may require external pull-up resistors on the signal lines.
- Signal Interfacing: Ensure the microcontroller or motor driver can handle the 5V signal levels.
- Mounting: Securely mount the encoder to the motor shaft to avoid misalignment or slippage.
Example: Using Encoder 775 with Arduino UNO
Below is an example code snippet to read the Encoder 775 signals using an Arduino UNO:
// Define encoder pins
const int encoderPinA = 2; // Channel A connected to digital pin 2
const int encoderPinB = 3; // Channel B connected to digital pin 3
volatile int encoderPosition = 0; // Variable to store encoder position
int lastEncoded = 0; // Variable to store the last encoder state
void setup() {
pinMode(encoderPinA, INPUT); // Set Channel A as input
pinMode(encoderPinB, INPUT); // Set Channel B as input
// Enable pull-up resistors for encoder pins
digitalWrite(encoderPinA, HIGH);
digitalWrite(encoderPinB, HIGH);
// Attach interrupts to encoder pins
attachInterrupt(digitalPinToInterrupt(encoderPinA), updateEncoder, CHANGE);
attachInterrupt(digitalPinToInterrupt(encoderPinB), updateEncoder, CHANGE);
Serial.begin(9600); // Initialize serial communication
}
void loop() {
// Print the encoder position to the serial monitor
Serial.println(encoderPosition);
delay(100); // Delay for readability
}
void updateEncoder() {
// Read the current state of the encoder pins
int MSB = digitalRead(encoderPinA); // Most significant bit
int LSB = digitalRead(encoderPinB); // Least significant bit
int encoded = (MSB << 1) | LSB; // Combine the two bits
int sum = (lastEncoded << 2) | encoded; // Calculate the state transition
// Update the encoder position based on the state transition
if (sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) {
encoderPosition++;
} else if (sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) {
encoderPosition--;
}
lastEncoded = encoded; // Update the last encoder state
}
Notes:
- Ensure the encoder is securely mounted to the motor shaft.
- Use interrupts for accurate signal reading, especially at high speeds.
Troubleshooting and FAQs
Common Issues:
No Signal Output:
- Check the power supply connections (VCC and GND).
- Verify that the encoder is properly connected to the microcontroller.
Incorrect Position Readings:
- Ensure the encoder is securely mounted to the motor shaft.
- Check for noise or interference on the signal lines.
Signal Noise:
- Use shielded cables for the encoder connections.
- Add capacitors or software debouncing to filter out noise.
Microcontroller Not Detecting Signals:
- Verify that the microcontroller pins are configured as inputs.
- Check if pull-up resistors are required for the encoder signals.
FAQs:
Q: Can the Encoder 775 be used with a 3.3V microcontroller?
A: Yes, but you may need a level shifter to convert the 5V output signals to 3.3V.
Q: What is the purpose of the Z (index) pin?
A: The Z pin provides a single pulse per revolution, which is useful for absolute positioning or homing.
Q: How do I calculate the speed of the motor using the encoder?
A: Measure the time between pulses on one channel (A or B) and use the encoder resolution (PPR) to calculate the rotational speed.
Q: Can I use the Encoder 775 with a stepper motor?
A: Yes, the encoder can provide feedback for closed-loop control of a stepper motor.
By following this documentation, you can effectively integrate the Encoder 775 into your projects for precise motor control and feedback.