How to Use Haptic Motor Driver: Examples, Pinouts, and Specs
Introduction
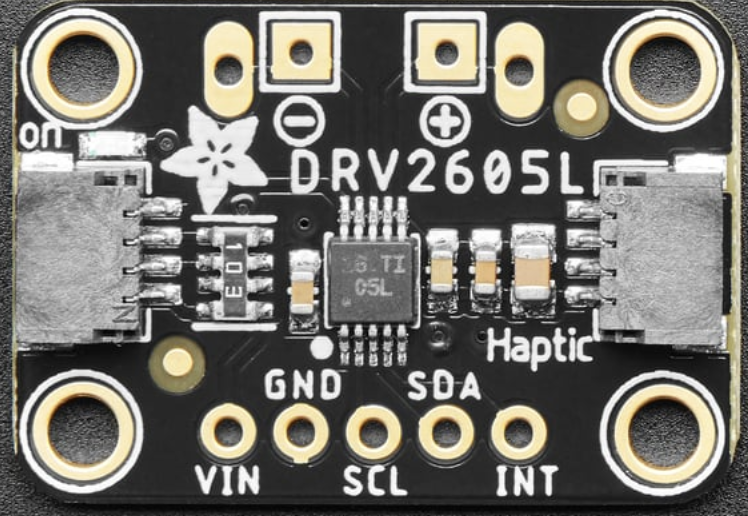
The Adafruit DRV2605L Haptic Motor Driver is a versatile and efficient component designed to control haptic motors, enabling tactile feedback in electronic devices. It is based on the Texas Instruments DRV2605L chip and is capable of driving both Linear Resonant Actuators (LRAs) and Eccentric Rotating Mass (ERM) motors. This driver is ideal for applications requiring precise vibration control, such as wearable devices, gaming controllers, smartphones, and other interactive systems.
The DRV2605L features an integrated library of haptic effects, making it easy to implement a wide range of tactile sensations without requiring complex programming. Additionally, it supports I²C communication, allowing seamless integration with microcontrollers like the Arduino UNO.
Explore Projects Built with Haptic Motor Driver
Explore Projects Built with Haptic Motor Driver
Technical Specifications
- Manufacturer: Adafruit
- Part Number: DRV2605L
- Operating Voltage: 2.0V to 5.2V
- Interface: I²C (7-bit address: 0x5A by default)
- Output Type: PWM or analog drive for haptic motors
- Supported Motors: ERM and LRA
- Integrated Features:
- Preloaded haptic effect library
- Real-time playback mode
- Auto-resonance detection for LRAs
- Dimensions: 20mm x 20mm (breakout board)
Pin Configuration and Descriptions
The DRV2605L breakout board has the following pin layout:
| Pin Name | Description |
|---|---|
| VIN | Power input (2.0V to 5.2V). Connect to the power supply. |
| GND | Ground. Connect to the ground of the circuit. |
| SDA | I²C data line. Connect to the SDA pin of the microcontroller. |
| SCL | I²C clock line. Connect to the SCL pin of the microcontroller. |
| IN | Optional analog or PWM input for motor control. |
| EN | Enable pin. Pull high to enable the driver, or low to disable it. |
| OUT+ | Positive output for the haptic motor. Connect to the motor's positive terminal. |
| OUT- | Negative output for the haptic motor. Connect to the motor's negative terminal. |
Usage Instructions
Connecting the DRV2605L to an Arduino UNO
To use the DRV2605L with an Arduino UNO, follow these steps:
- Connect the VIN pin to the Arduino's 5V pin.
- Connect the GND pin to the Arduino's GND pin.
- Connect the SDA pin to the Arduino's A4 pin (I²C data line).
- Connect the SCL pin to the Arduino's A5 pin (I²C clock line).
- Connect the OUT+ and OUT- pins to the terminals of the haptic motor.
Example Arduino Code
The following example demonstrates how to use the DRV2605L with an Arduino UNO to play a haptic effect from the built-in library:
#include <Wire.h>
#include <Adafruit_DRV2605.h>
// Create an instance of the DRV2605L driver
Adafruit_DRV2605 drv;
void setup() {
Serial.begin(9600);
Serial.println("Initializing DRV2605L...");
// Initialize the DRV2605L
if (!drv.begin()) {
Serial.println("Failed to find DRV2605L chip. Check connections.");
while (1);
}
Serial.println("DRV2605L initialized!");
// Select the ERM motor mode (default)
drv.selectLibrary(1);
// Set the haptic effect to play (e.g., effect #1)
drv.setMode(DRV2605_MODE_INTTRIG); // Internal trigger mode
drv.setWaveform(0, 1); // Play effect #1
drv.setWaveform(1, 0); // End of sequence
}
void loop() {
Serial.println("Playing haptic effect...");
drv.go(); // Trigger the effect
delay(1000); // Wait for 1 second before repeating
}
Important Considerations
- Ensure the power supply voltage is within the specified range (2.0V to 5.2V).
- Use appropriate pull-up resistors (typically 4.7kΩ) on the SDA and SCL lines if not already present.
- For LRA motors, the DRV2605L automatically detects the resonance frequency for optimal performance.
- Avoid exceeding the current rating of the motor to prevent damage.
Troubleshooting and FAQs
Common Issues
The motor does not vibrate.
- Verify all connections, especially the motor terminals and I²C lines.
- Check the power supply voltage and ensure it is within the specified range.
- Ensure the correct I²C address (0x5A by default) is being used in the code.
The Arduino cannot detect the DRV2605L.
- Confirm that the SDA and SCL lines are connected to the correct pins on the Arduino.
- Use an I²C scanner sketch to verify the DRV2605L's address.
The motor vibrates weakly or inconsistently.
- Ensure the motor is compatible with the DRV2605L (ERM or LRA).
- For LRA motors, verify that the auto-resonance detection is functioning correctly.
Tips for Troubleshooting
- Use a multimeter to check for continuity and proper voltage levels on all connections.
- Test the motor independently to ensure it is functional.
- Refer to the Adafruit DRV2605L datasheet for advanced configuration options.
By following this documentation, you can effectively integrate the Adafruit DRV2605L Haptic Motor Driver into your projects and create engaging tactile feedback experiences.