How to Use WG901_accelerometer: Examples, Pinouts, and Specs
Introduction
The WG901 accelerometer is a versatile sensor capable of measuring acceleration along multiple axes. It is an essential component in modern electronics, providing critical data for motion detection, orientation, and dynamic acceleration. Common applications include smartphones, wearables, gaming devices, vehicle dynamics, and industrial machinery monitoring.
Explore Projects Built with WG901_accelerometer
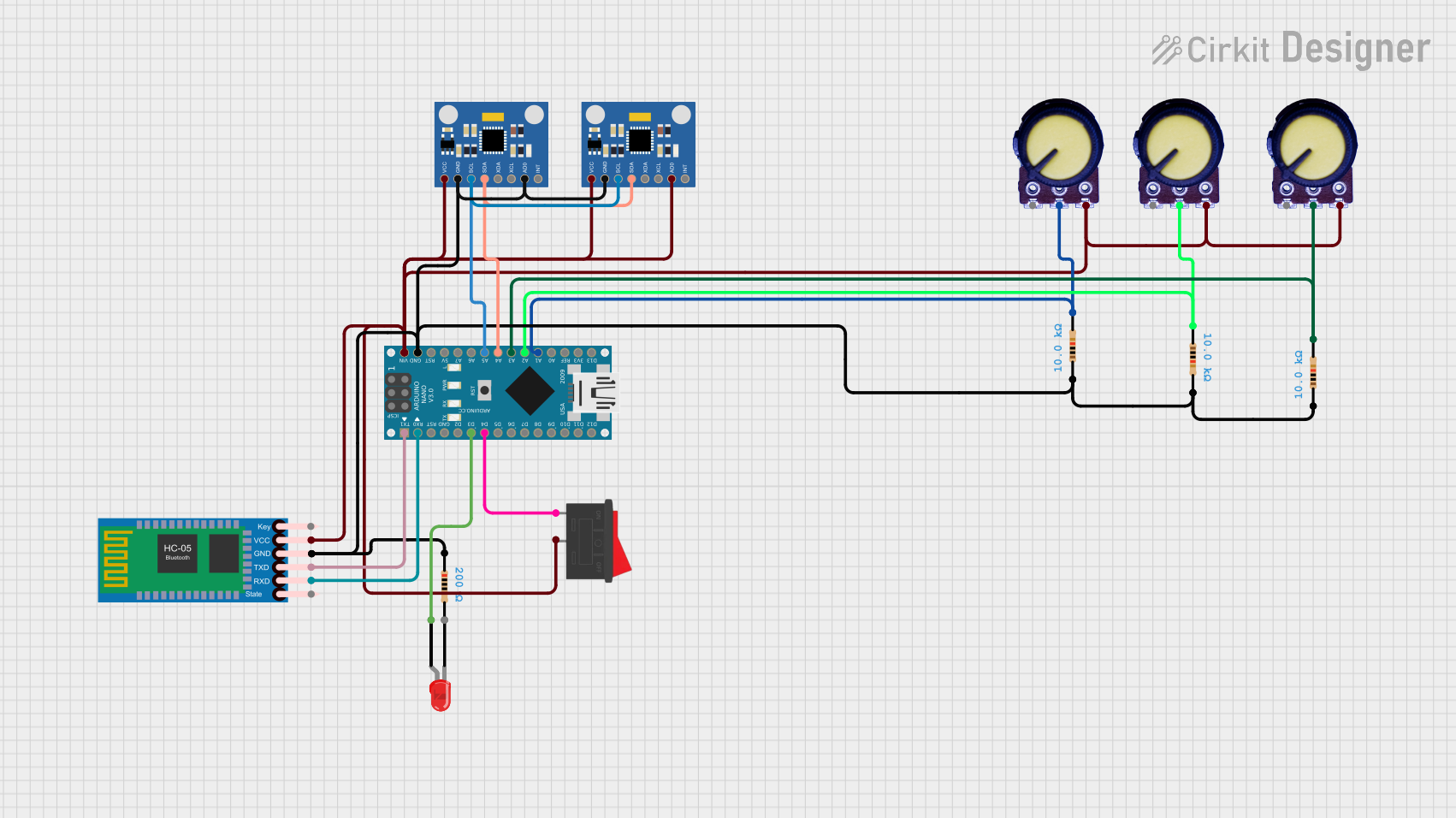
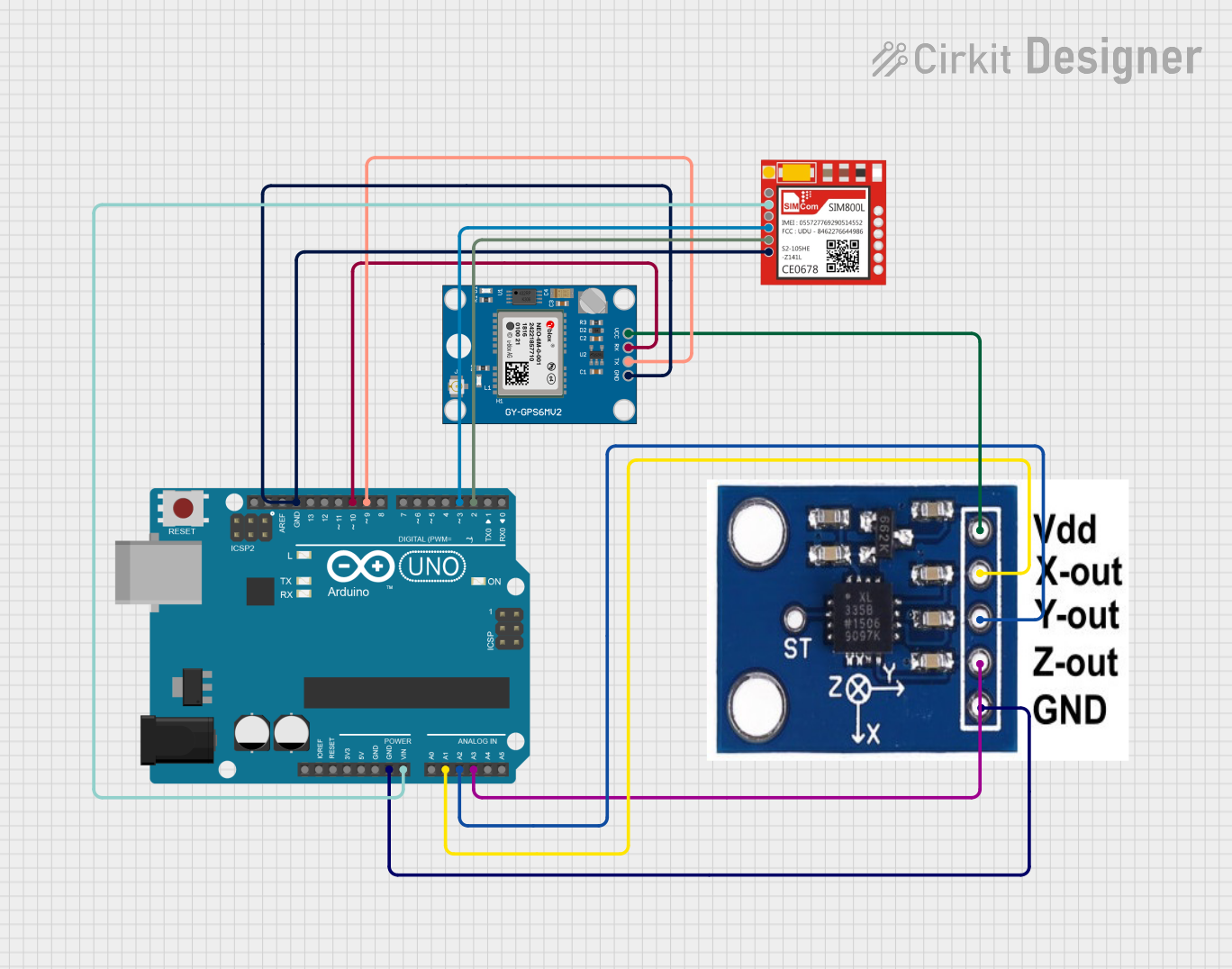
Explore Projects Built with WG901_accelerometer
Technical Specifications
Key Technical Details
- Voltage Supply Range: 2.4V to 3.6V
- Measurement Range: ±2g/±4g/±8g/±16g (selectable)
- Sensitivity (Selectable): 256 LSB/g @ 2g to 64 LSB/g @ 16g
- Output Data Rate (ODR): 1 Hz to 5.3 kHz
- Interface: I2C/SPI (selectable)
- Operating Temperature: -40°C to +85°C
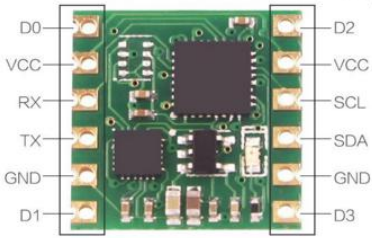
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VDD | Power supply voltage |
| 2 | GND | Ground |
| 3 | SCL/SPC | Serial Clock for I2C/SPI Clock |
| 4 | SDA/SDI | Serial Data for I2C/SPI Data Input |
| 5 | SDO | SPI Data Output (if SPI mode is selected) |
| 6 | CS | Chip Select for SPI (active low) |
| 7 | INT1 | Interrupt 1 output |
| 8 | INT2 | Interrupt 2 output |
Usage Instructions
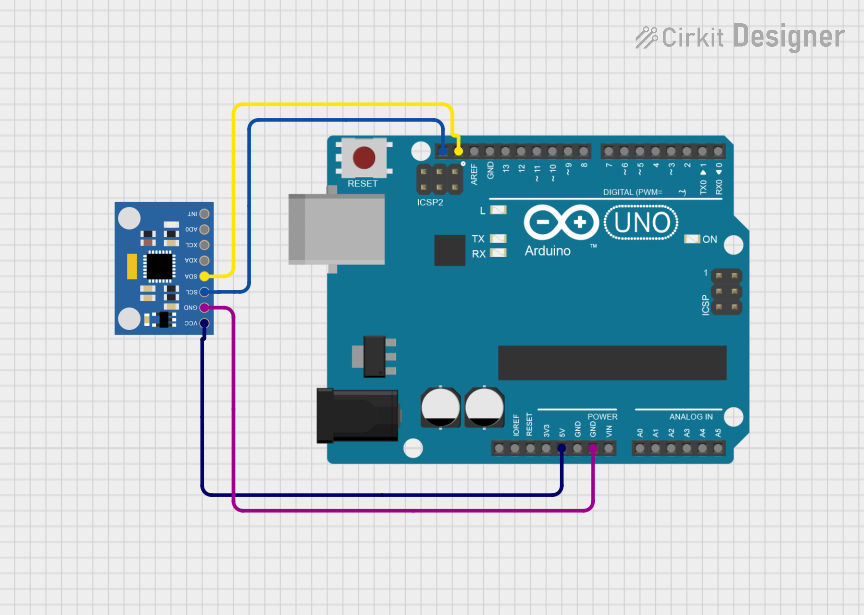
Integration into a Circuit
- Power Supply: Connect VDD to a 2.4V to 3.6V power source and GND to the system ground.
- Communication Interface: Choose between I2C or SPI for communication and connect SCL/SPC and SDA/SDI accordingly. If using SPI, also connect SDO and CS.
- Interrupts: Optionally, connect INT1 and INT2 to microcontroller interrupt pins for motion detection or data-ready signals.
Best Practices
- Use decoupling capacitors close to the power pins to filter out noise.
- Ensure that the I2C/SPI lines have appropriate pull-up resistors.
- Mount the accelerometer firmly to avoid false readings due to mechanical vibrations.
- Calibrate the sensor for accurate measurements.
Example Code for Arduino UNO
#include <Wire.h>
// WG901 I2C address (check datasheet for your device's address)
#define WG901_I2C_ADDRESS 0x1D
// Register addresses (refer to the WG901 datasheet)
#define REG_CTRL1 0x20
#define REG_OUT_X 0x29
void setup() {
Wire.begin(); // Initialize I2C
Serial.begin(9600); // Start serial communication at 9600 baud
// Initialize WG901 (set ODR, measurement range, etc.)
Wire.beginTransmission(WG901_I2C_ADDRESS);
Wire.write(REG_CTRL1);
Wire.write(0x57); // Example configuration byte
Wire.endTransmission();
}
void loop() {
int16_t xAccel = readAcceleration(REG_OUT_X);
Serial.print("X-Axis Acceleration: ");
Serial.println(xAccel);
delay(100); // Read every 100 milliseconds
}
int16_t readAcceleration(byte regAddress) {
Wire.beginTransmission(WG901_I2C_ADDRESS);
Wire.write(regAddress);
Wire.endTransmission(false);
Wire.requestFrom(WG901_I2C_ADDRESS, 2, true);
byte lowByte = Wire.read();
byte highByte = Wire.read();
// Combine the two bytes into a 16-bit value and return it
return (int16_t)((highByte << 8) | lowByte);
}
Troubleshooting and FAQs
Common Issues
- No Data Output: Ensure that the power supply is within the specified range and that the I2C/SPI connections are correct.
- Inaccurate Readings: Verify that the accelerometer is properly calibrated and mounted securely.
- Communication Errors: Check for proper pull-up resistors on the I2C/SPI lines and absence of signal noise.
FAQs
Q: How do I change the measurement range? A: Modify the configuration byte sent to the REG_CTRL1 register to select the desired range.
Q: Can I use both I2C and SPI simultaneously? A: No, you must select one communication protocol and configure the device accordingly.
Q: What is the purpose of the INT1 and INT2 pins? A: These pins can be configured to output interrupt signals for events like data ready, free-fall detection, or motion detection.
Q: How do I interpret the raw acceleration data? A: The raw data needs to be converted using the sensitivity level set by the measurement range. Refer to the datasheet for the conversion formula.
This documentation provides a foundational understanding of the WG901 accelerometer and how to integrate it into electronic projects. For more detailed information, always refer to the manufacturer's datasheet.