How to Use PCA9685 16*12 Bit: Examples, Pinouts, and Specs
Introduction
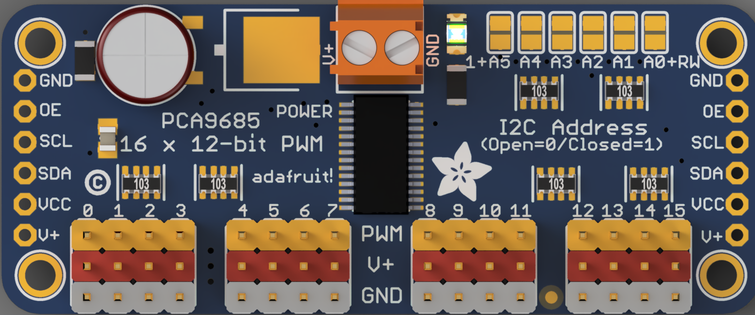
The PCA9685, manufactured by Adafruit, is a 16-channel, 12-bit PWM (Pulse Width Modulation) controller designed for precise control of servos, LEDs, and other devices. It communicates via the I2C protocol, allowing it to interface with microcontrollers like Arduino, Raspberry Pi, and others using only two pins (SCL and SDA). This makes it an ideal choice for robotics, automation, and lighting projects where multiple outputs need to be controlled efficiently.
Explore Projects Built with PCA9685 16*12 Bit
Explore Projects Built with PCA9685 16*12 Bit
Common Applications and Use Cases
- Controlling up to 16 servos in robotics projects
- Driving LED arrays for lighting or displays
- Motor control in automation systems
- Generating PWM signals for other electronic devices
- Projects requiring precise timing and minimal microcontroller pin usage
Technical Specifications
The PCA9685 is a versatile and powerful component. Below are its key technical details:
| Parameter | Value |
|---|---|
| Channels | 16 PWM outputs |
| Resolution | 12-bit (4096 steps) |
| Communication Protocol | I2C |
| Operating Voltage Range | 2.3V to 5.5V |
| Logic Voltage | 3.3V or 5V compatible |
| PWM Frequency Range | 24 Hz to 1526 Hz |
| Maximum Output Current | 25 mA per channel |
| Address Configurations | 6-bit configurable (up to 62 devices on I2C) |
| Operating Temperature | -40°C to +85°C |
Pin Configuration and Descriptions
The PCA9685 module typically comes with the following pin layout:
| Pin Name | Description |
|---|---|
| VCC | Power supply input (2.3V to 5.5V). Powers the logic circuitry. |
| GND | Ground connection. |
| SDA | I2C data line. Used for communication with the microcontroller. |
| SCL | I2C clock line. Used for communication with the microcontroller. |
| OE | Output enable pin. Active low; can be used to disable all outputs. |
| PWM Outputs | 16 output pins (labeled 0 to 15) for driving servos, LEDs, or other devices. |
Usage Instructions
How to Use the PCA9685 in a Circuit
- Power the Module: Connect the VCC pin to a 3.3V or 5V power source and the GND pin to ground.
- Connect I2C Lines: Connect the SDA and SCL pins to the corresponding I2C pins on your microcontroller.
- Set the I2C Address: The PCA9685 has a default I2C address of
0x40. You can change this by configuring the address pins (A0 to A5) to allow up to 62 unique addresses. - Connect Outputs: Attach servos, LEDs, or other devices to the PWM output pins (0 to 15).
- Install Libraries: If using an Arduino, install the Adafruit PCA9685 library for easy control.
- Write Code: Use the library functions to set PWM frequencies and duty cycles for each channel.
Important Considerations and Best Practices
- Power Supply: Ensure the power supply can handle the current requirements of all connected devices.
- Bypass Capacitors: Add a decoupling capacitor (e.g., 100 µF) near the VCC pin to stabilize the power supply.
- I2C Pull-Up Resistors: If not already present, add pull-up resistors (4.7 kΩ to 10 kΩ) on the SDA and SCL lines.
- PWM Frequency: Choose an appropriate PWM frequency for your application. For servos, 50 Hz is typical.
- Output Enable: Use the OE pin to disable all outputs when needed, such as during initialization.
Example Code for Arduino UNO
Below is an example of how to control a servo using the PCA9685 and an Arduino UNO:
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// Create an instance of the PCA9685 driver
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
void setup() {
Serial.begin(9600); // Initialize serial communication for debugging
pwm.begin(); // Initialize the PCA9685
pwm.setPWMFreq(50); // Set PWM frequency to 50 Hz (suitable for servos)
}
void loop() {
// Move servo on channel 0 to 0 degrees
pwm.setPWM(0, 0, 150); // 150 corresponds to 0 degrees
delay(1000); // Wait for 1 second
// Move servo on channel 0 to 90 degrees
pwm.setPWM(0, 0, 375); // 375 corresponds to 90 degrees
delay(1000); // Wait for 1 second
// Move servo on channel 0 to 180 degrees
pwm.setPWM(0, 0, 600); // 600 corresponds to 180 degrees
delay(1000); // Wait for 1 second
}
Explanation of Code
- The
Adafruit_PWMServoDriverlibrary simplifies communication with the PCA9685. - The
setPWMFreq()function sets the PWM frequency (50 Hz for servos). - The
setPWM(channel, on, off)function controls the PWM signal for a specific channel. Theonparameter is typically 0, and theoffparameter determines the duty cycle.
Troubleshooting and FAQs
Common Issues and Solutions
No Response from the PCA9685
- Cause: Incorrect I2C wiring or address mismatch.
- Solution: Verify SDA and SCL connections. Check the I2C address using a scanner sketch.
Servos or LEDs Not Responding
- Cause: Insufficient power supply or incorrect PWM settings.
- Solution: Ensure the power supply can handle the load. Double-check the PWM frequency and duty cycle.
Flickering LEDs
- Cause: Unstable power supply or incorrect PWM frequency.
- Solution: Add a decoupling capacitor near the VCC pin. Adjust the PWM frequency.
I2C Communication Errors
- Cause: Missing pull-up resistors on SDA and SCL lines.
- Solution: Add 4.7 kΩ to 10 kΩ pull-up resistors to the I2C lines.
FAQs
Q: Can I use the PCA9685 with a 3.3V microcontroller?
- A: Yes, the PCA9685 is compatible with both 3.3V and 5V logic levels.
Q: How many PCA9685 modules can I connect to a single I2C bus?
- A: Up to 62 modules can be connected by configuring the address pins.
Q: What is the maximum current the PCA9685 can handle?
- A: Each channel can handle up to 25 mA. For higher currents, use external drivers.
Q: Can I control DC motors with the PCA9685?
- A: Yes, but you will need an H-bridge or motor driver circuit to handle the motor's current.
This documentation provides a comprehensive guide to using the PCA9685. For further assistance, refer to Adafruit's official resources or community forums.