How to Use BLHELI_S EM-40A 4IN1 ESC: Examples, Pinouts, and Specs
Introduction
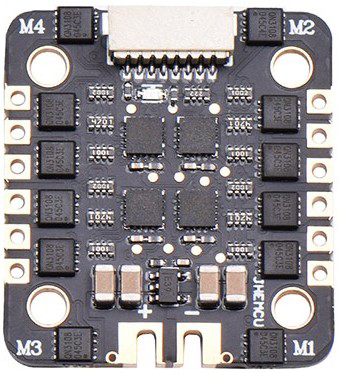
The BLHELI_S EM-40A 4IN1 ESC by JHEMCU is an advanced electronic speed controller designed for multirotor aircraft, particularly quadcopters. It integrates four ESCs into one compact board, simplifying the wiring and installation process. This component is ideal for hobbyists and professionals looking to build or upgrade their drones with reliable and efficient motor control.
Explore Projects Built with BLHELI_S EM-40A 4IN1 ESC



Explore Projects Built with BLHELI_S EM-40A 4IN1 ESC
Common Applications and Use Cases
- Quadcopters and other multirotor drones
- RC airplanes with multiple brushless motors
- DIY projects requiring precise motor speed control
Technical Specifications
Key Technical Details
- Firmware: BLHELI_S
- Continuous Current: 40A per channel
- Burst Current: 45A (up to 10 seconds)
- Input Voltage: 2-6S LiPo
- BEC: No
- Firmware: BLHeli_S
- Size: 36x36mm
- Mounting Hole: 30.5x30.5mm
- Weight: Approx. 13g
Pin Configuration and Descriptions
| Pin | Function | Description |
|---|---|---|
| 1 | Battery + (B+) | Connect to the positive terminal of the battery |
| 2 | Battery - (B-) | Connect to the negative terminal of the battery |
| 3 | Motor 1 Output | Connect to the motor 1 |
| 4 | Motor 2 Output | Connect to the motor 2 |
| 5 | Motor 3 Output | Connect to the motor 3 |
| 6 | Motor 4 Output | Connect to the motor 4 |
| 7 | Signal 1 | Input signal for motor 1 |
| 8 | Signal 2 | Input signal for motor 2 |
| 9 | Signal 3 | Input signal for motor 3 |
| 10 | Signal 4 | Input signal for motor 4 |
| 11 | GND | Ground connection for signals |
Usage Instructions
How to Use the Component in a Circuit
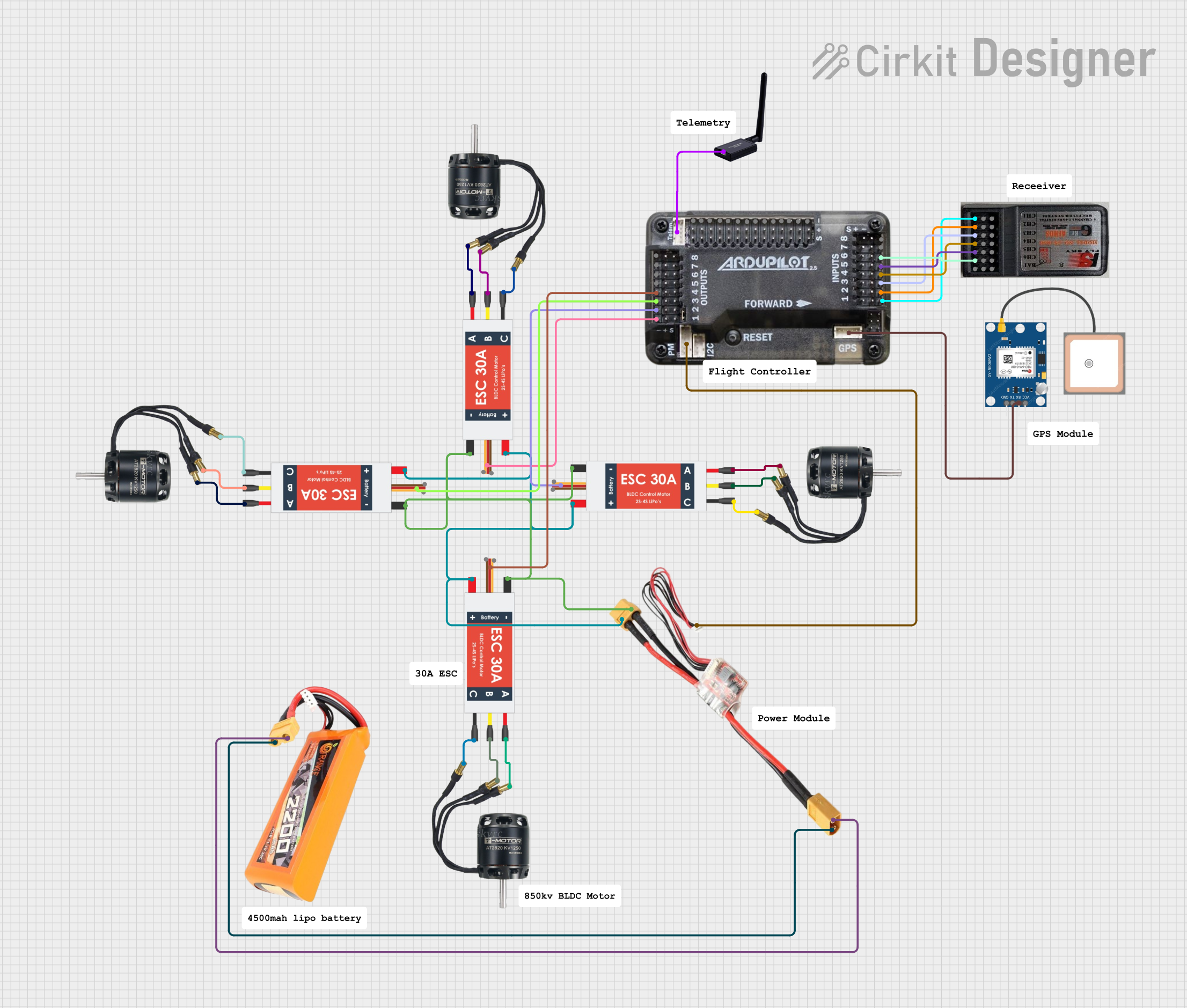
- Power Connection: Connect the battery to the B+ and B- pins, ensuring correct polarity.
- Motor Connection: Attach each brushless motor to the corresponding motor output pins.
- Signal Connection: Connect the signal inputs (Signal 1-4) to the respective outputs from the flight controller.
- Ground Connection: Connect the ground (GND) to the flight controller's ground.
Important Considerations and Best Practices
- Ensure that the input voltage does not exceed the specified 2-6S LiPo range to prevent damage.
- Always verify motor rotation direction and swap two motor wires if the direction needs to be changed.
- Use a proper gauge wire to handle the current for both the power supply and motor connections.
- Calibrate the ESC with your flight controller before the first flight to ensure proper response.
- Keep the ESC away from high-temperature components to avoid overheating.
Troubleshooting and FAQs
Common Issues
- Motors not spinning: Check connections, ensure proper calibration, and verify that the flight controller is sending signals.
- ESC overheating: Ensure adequate airflow, check for overloading conditions, and confirm that the input voltage is within the specified range.
- Inconsistent motor speed: Calibrate the ESC with the flight controller, and check for damaged components.
Solutions and Tips
- Calibration: Follow the calibration procedure in the flight controller's manual to ensure the ESC responds correctly to throttle input.
- Firmware Updates: Regularly update the BLHELI_S firmware for optimal performance and new features.
- Inspection: Periodically inspect the ESC for any signs of damage or wear.
FAQs
Q: Can I use a different firmware with this ESC? A: The EM-40A 4IN1 ESC is designed to work with BLHELI_S firmware. Using other firmware may not be supported and could lead to unpredictable behavior.
Q: How do I change the motor direction? A: To change the motor direction, swap any two of the three motor wires connected to the ESC.
Q: What should I do if one of the ESC channels is not working? A: Check the solder joints and connections for that channel. If the issue persists, the ESC may need to be replaced.
Example Code for Arduino UNO
Below is an example code snippet for controlling a motor connected to the BLHELI_S EM-40A 4IN1 ESC using an Arduino UNO. This code assumes you have connected the ESC signal wire to pin 9 on the Arduino.
#include <Servo.h>
Servo esc; // Create a servo object to control the ESC
void setup() {
esc.attach(9); // Attach the signal pin to pin 9
esc.writeMicroseconds(1000); // Send 1000us pulse to arm the ESC
delay(1000); // Wait 1 second for the ESC to initialize
}
void loop() {
int throttle = 1500; // Set throttle to mid-point (1500us)
esc.writeMicroseconds(throttle); // Send throttle signal to ESC
delay(1000); // Wait 1 second
// Add your code here to change the throttle as needed
}
Note: Always ensure that the propellers are removed when testing the ESC and motors on the bench to prevent injury or damage.