How to Use A4988: Examples, Pinouts, and Specs
Introduction
The A4988 is a microstepping driver designed for controlling bipolar stepper motors. It enables precise control of motor position and speed, making it ideal for applications requiring high accuracy and smooth motion. The driver supports up to 2A per phase with adjustable current control, allowing for efficient operation of stepper motors. Additionally, the A4988 includes built-in protection features such as over-temperature shutdown, under-voltage lockout, and crossover-current protection, ensuring reliable performance.
Explore Projects Built with A4988
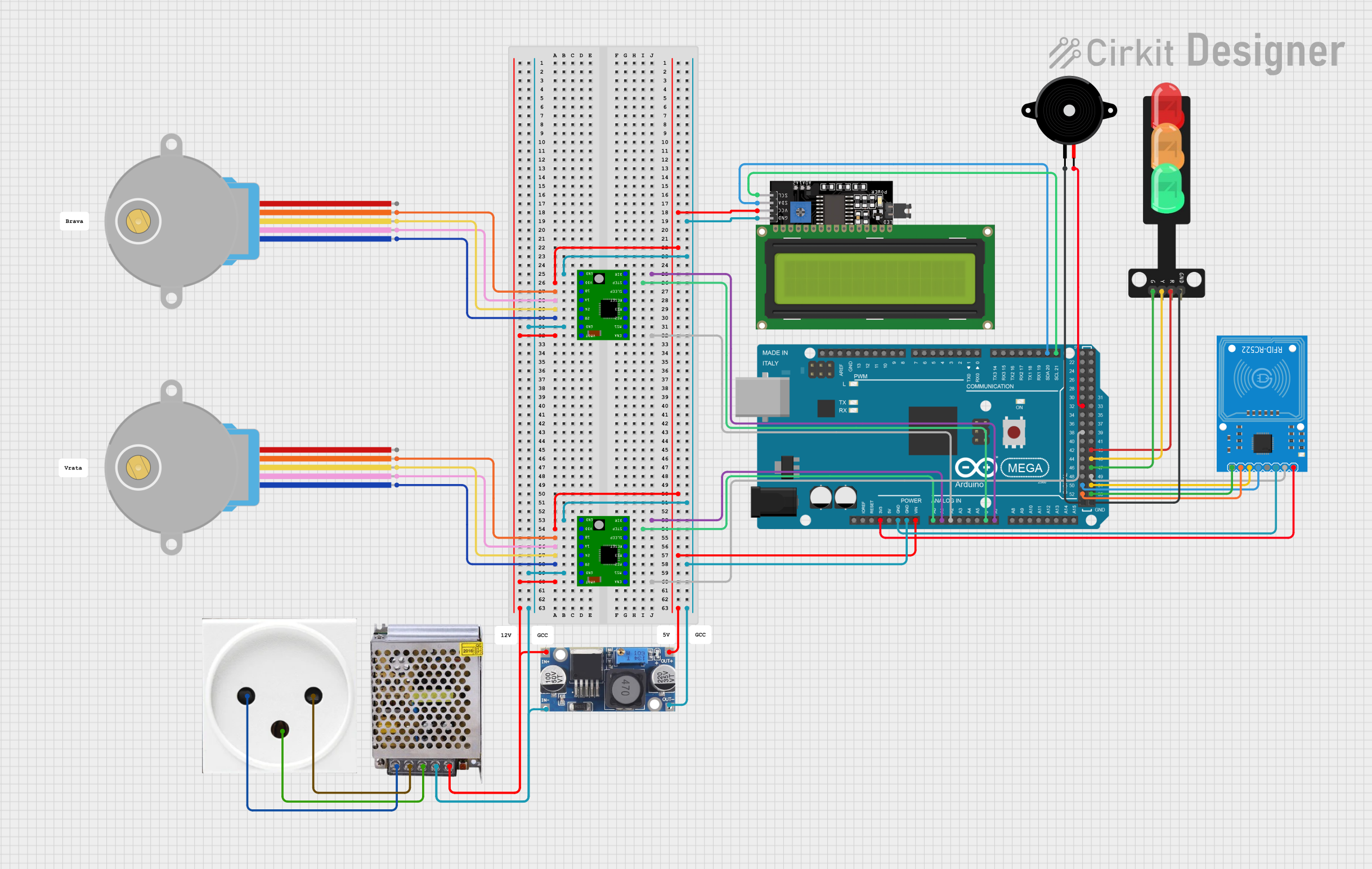
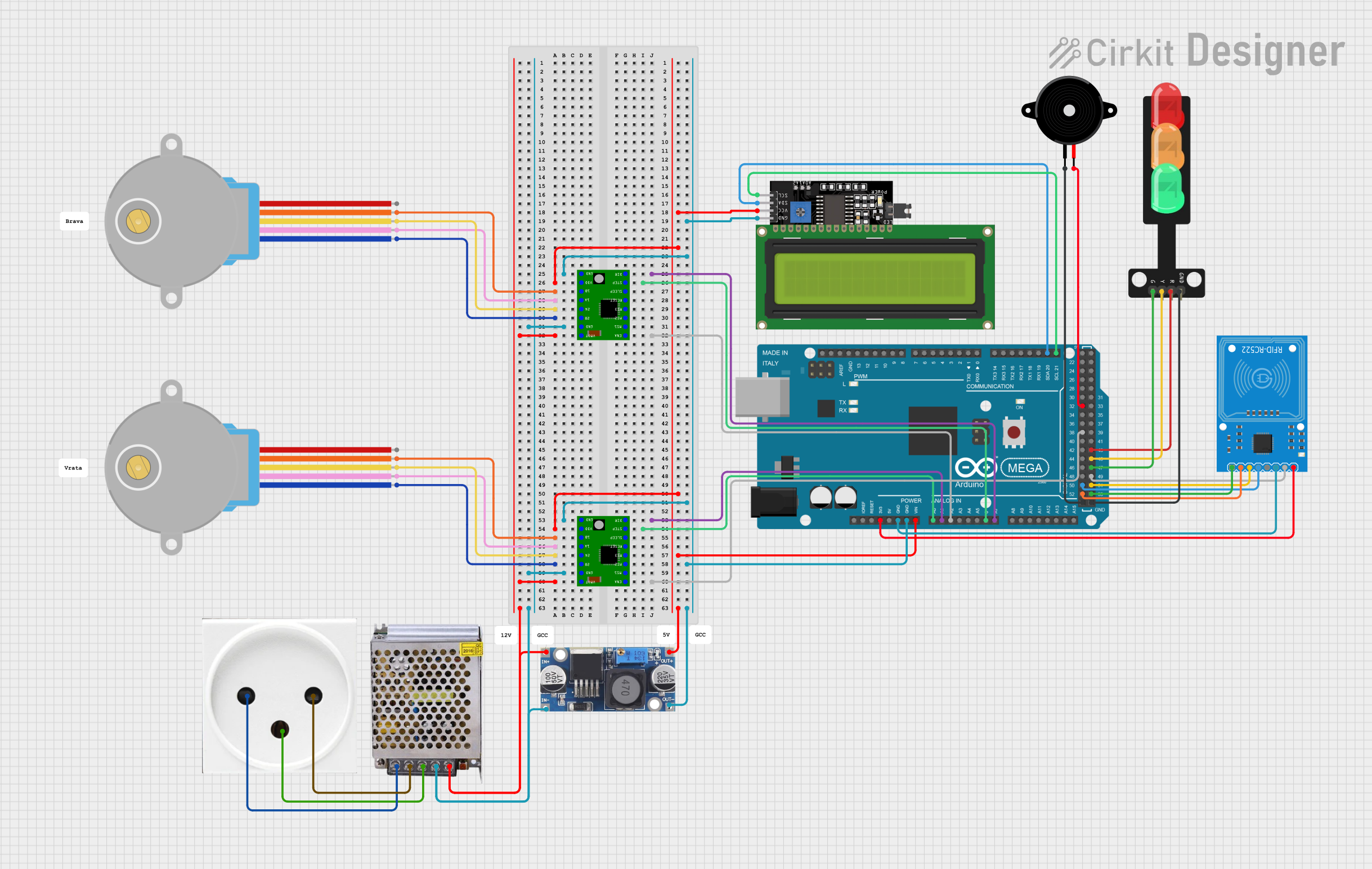
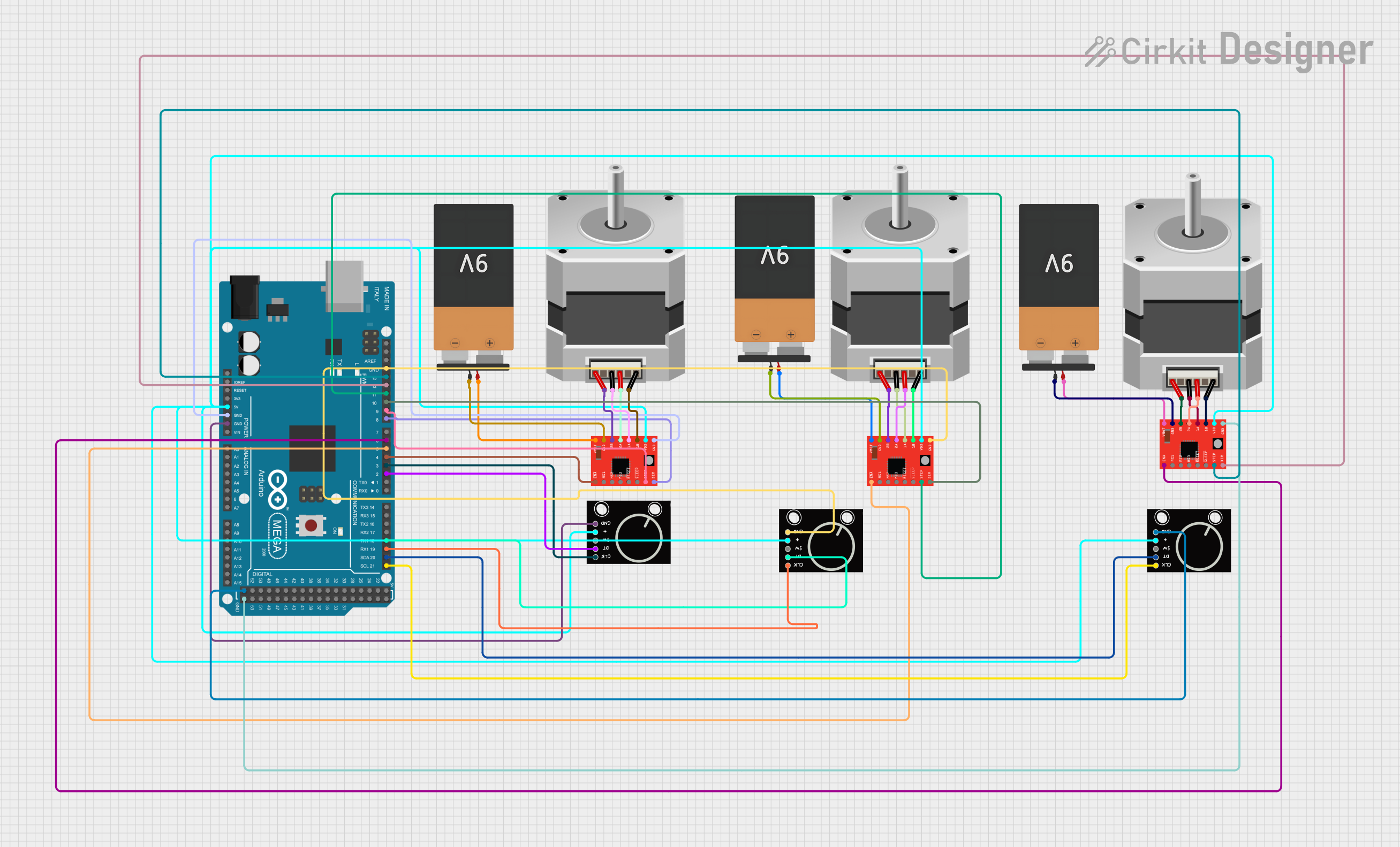
Explore Projects Built with A4988
Common Applications
- 3D printers
- CNC machines
- Robotics
- Automated camera sliders
- Precision motion control systems
Technical Specifications
Key Technical Details
- Motor Type Supported: Bipolar stepper motors
- Microstepping Modes: Full, 1/2, 1/4, 1/8, and 1/16 steps
- Maximum Current per Phase: 2A (with sufficient cooling)
- Logic Voltage (VDD): 3.3V to 5V
- Motor Supply Voltage (VMOT): 8V to 35V
- Current Control: Adjustable via potentiometer
- Built-in Protections: Over-temperature, under-voltage lockout, and short-circuit protection
Pin Configuration and Descriptions
The A4988 has 16 pins, as described in the table below:
| Pin Name | Type | Description |
|---|---|---|
| VMOT | Power Input | Motor power supply (8V to 35V). Connect a decoupling capacitor close to this pin. |
| GND | Power Ground | Ground connection for motor power supply. |
| VDD | Power Input | Logic power supply (3.3V to 5V). |
| GND | Power Ground | Ground connection for logic power supply. |
| 1A, 1B | Motor Output | Connect to one coil of the stepper motor. |
| 2A, 2B | Motor Output | Connect to the other coil of the stepper motor. |
| STEP | Logic Input | Controls the step signal for the motor. Each pulse moves the motor one step. |
| DIR | Logic Input | Controls the direction of motor rotation. |
| ENABLE | Logic Input | Enables or disables the motor driver (active low). |
| MS1, MS2, MS3 | Logic Input | Microstepping resolution selection pins. |
| RESET | Logic Input | Resets the driver (active low). |
| SLEEP | Logic Input | Puts the driver into low-power sleep mode (active low). |
| REF | Analog Input | Reference voltage for current control. Adjusted via the onboard potentiometer. |
Usage Instructions
How to Use the A4988 in a Circuit
Power Connections:
- Connect VMOT to a power supply (8V to 35V) suitable for your stepper motor.
- Connect VDD to a 3.3V or 5V logic power supply.
- Ensure both GND pins are connected to the ground of their respective power supplies.
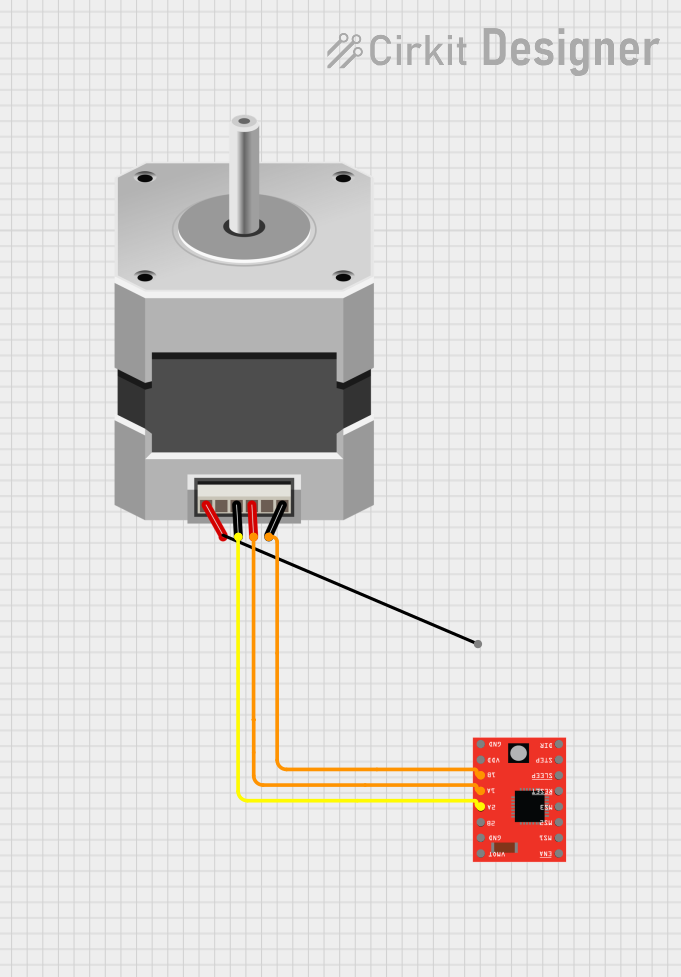
Motor Connections:
- Connect the stepper motor coils to the 1A, 1B, 2A, and 2B pins. Refer to your motor's datasheet to identify the coil pairs.
Control Pins:
- Connect the STEP and DIR pins to your microcontroller or control circuit.
- Use the MS1, MS2, and MS3 pins to set the desired microstepping mode (refer to the table below).
| MS1 | MS2 | MS3 | Microstepping Mode |
|---|---|---|---|
| Low | Low | Low | Full Step |
| High | Low | Low | Half Step |
| Low | High | Low | Quarter Step |
| High | High | Low | Eighth Step |
| High | High | High | Sixteenth Step |
Adjust Current Limit:
- Use the onboard potentiometer to set the current limit. This prevents overheating and ensures safe operation of the motor.
Decoupling Capacitors:
- Place a 100µF electrolytic capacitor close to the VMOT pin to reduce voltage spikes.
- Add a 0.1µF ceramic capacitor near the VDD pin for logic power stability.
Example Code for Arduino UNO
Below is an example of how to control a stepper motor using the A4988 and an Arduino UNO:
// Define control pins
#define STEP_PIN 3 // Connect to STEP pin on A4988
#define DIR_PIN 4 // Connect to DIR pin on A4988
void setup() {
pinMode(STEP_PIN, OUTPUT); // Set STEP pin as output
pinMode(DIR_PIN, OUTPUT); // Set DIR pin as output
digitalWrite(DIR_PIN, HIGH); // Set initial direction (HIGH = clockwise)
}
void loop() {
// Generate step pulses
for (int i = 0; i < 200; i++) { // 200 steps for one revolution (1.8°/step motor)
digitalWrite(STEP_PIN, HIGH); // Step pulse HIGH
delayMicroseconds(1000); // 1ms delay (adjust for speed control)
digitalWrite(STEP_PIN, LOW); // Step pulse LOW
delayMicroseconds(1000); // 1ms delay
}
delay(1000); // Wait 1 second before changing direction
// Change direction
digitalWrite(DIR_PIN, LOW); // Reverse direction (LOW = counterclockwise)
delay(1000); // Wait 1 second before next loop
}
Important Considerations
- Heat Management: The A4988 can get hot during operation. Use a heat sink or active cooling if necessary.
- Current Limiting: Always set the current limit to match your motor's rated current to avoid damage.
- Power Supply: Ensure your power supply can handle the motor's current requirements.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving:
- Check all connections, especially the motor coils and power supply.
- Verify that the STEP pin is receiving pulses from the microcontroller.
Motor Vibrates but Doesn't Rotate:
- Ensure the motor coils are connected correctly (1A/1B and 2A/2B pairs).
- Check the microstepping mode settings (MS1, MS2, MS3).
Driver Overheating:
- Reduce the current limit using the potentiometer.
- Add a heat sink or active cooling to the A4988.
Erratic Motor Movement:
- Verify the power supply voltage and current are stable.
- Add decoupling capacitors near the VMOT and VDD pins.
FAQs
Can I use the A4988 with a unipolar stepper motor? No, the A4988 is designed for bipolar stepper motors only.
What happens if I exceed the current limit? Exceeding the current limit can cause the driver to overheat and enter thermal shutdown. Always set the current limit appropriately.
How do I calculate the current limit? The current limit is set using the formula:
Current Limit = VREF / (8 × RS)
whereVREFis the voltage on the REF pin, andRSis the sense resistor value (typically 0.1Ω).
By following this documentation, you can effectively use the A4988 to control stepper motors in your projects.