How to Use SparkFun AST-CAN485 IO Shield 24V: Examples, Pinouts, and Specs
Introduction
The SparkFun AST-CAN485 IO Shield is an electronic component designed to facilitate communication between a microcontroller, such as an Arduino, and devices using the CAN (Controller Area Network) protocol. This shield operates at 24V, making it suitable for industrial applications where higher voltage levels are common. It is an ideal choice for automotive systems, home automation, and other projects requiring robust communication between various electronic devices.
Explore Projects Built with SparkFun AST-CAN485 IO Shield 24V
Explore Projects Built with SparkFun AST-CAN485 IO Shield 24V
Common Applications and Use Cases
- Automotive electronics (e.g., connecting sensors and actuators)
- Industrial control systems
- Home automation networks
- Robotics communication interfaces
- Data logging and telemetry systems
Technical Specifications
Key Technical Details
- Operating Voltage: 24V
- Communication Protocol: CAN (Controller Area Network)
- Compatible with Arduino and other microcontrollers
- Extended temperature range for industrial environments
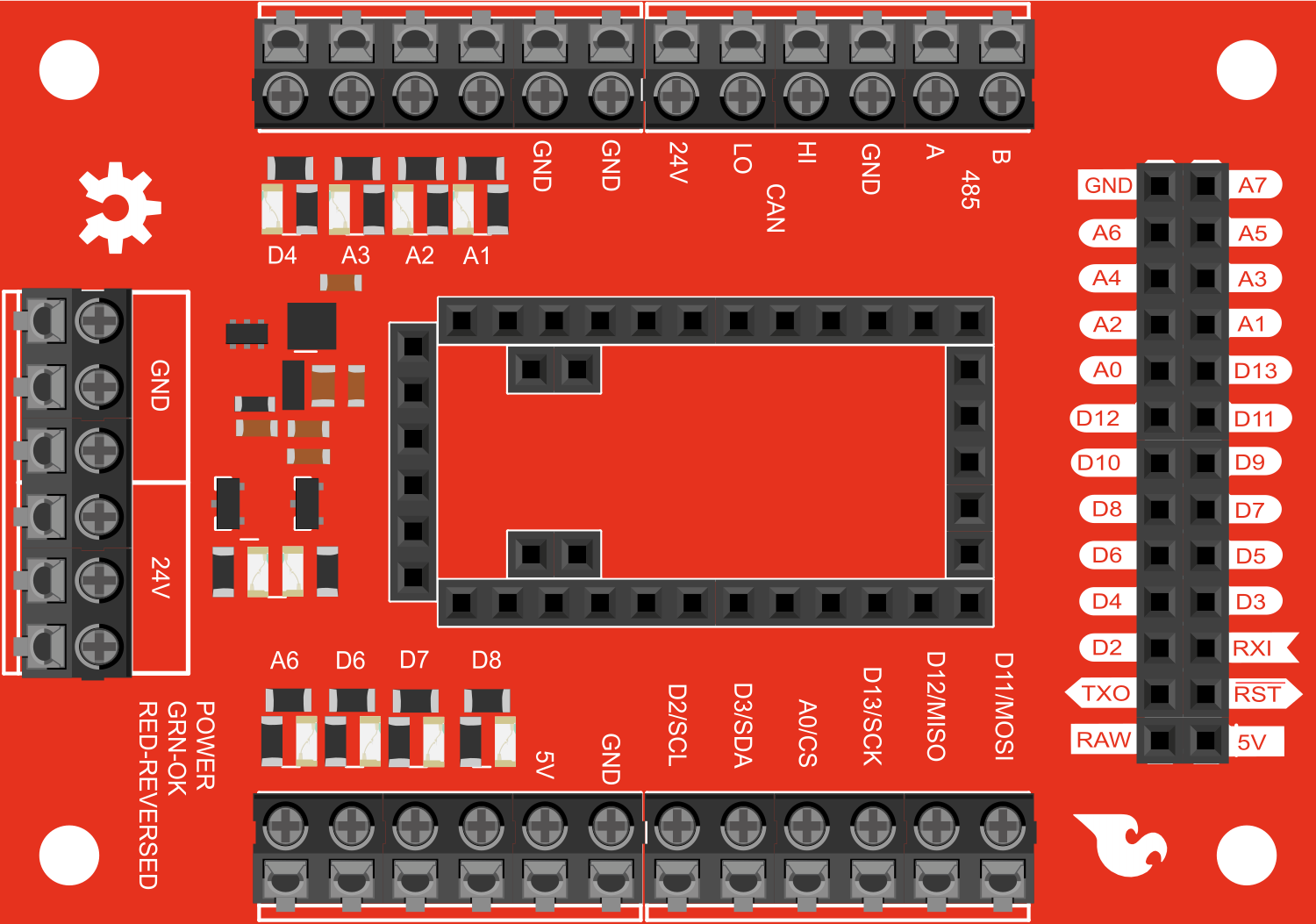
Pin Configuration and Descriptions
| Pin Number | Description | Notes |
|---|---|---|
| 1 | CAN_H | CAN High |
| 2 | CAN_L | CAN Low |
| 3 | GND | Ground |
| 4 | V+ (24V) | Supply Voltage |
| 5 | NC | Not Connected |
| 6 | NC | Not Connected |
| 7 | Digital IO | Configurable digital input/output |
| 8 | Analog Input | Analog sensor input |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Ensure that the shield is powered with a stable 24V supply.
- Connection to Microcontroller: Attach the shield to your Arduino or compatible microcontroller.
- CAN Bus Connection: Connect the CAN_H and CAN_L pins to your CAN network.
- Digital/Analog IO: Utilize the digital and analog pins for additional sensors or actuators as needed.
Important Considerations and Best Practices
- Always verify the power supply voltage and polarity before connecting the shield.
- Use twisted-pair cables for CAN_H and CAN_L connections to reduce noise.
- Ensure proper termination of the CAN network with a 120-ohm resistor.
- Avoid long wire runs and follow proper grounding practices to minimize interference.
Troubleshooting and FAQs
Common Issues Users Might Face
- Communication Errors: Check the wiring and termination resistors on the CAN bus.
- No Power to the Shield: Verify the power supply and connections to the V+ and GND pins.
- Inconsistent Readings from IO Pins: Ensure that there is no electrical noise affecting the signals and that the pins are configured correctly in the software.
Solutions and Tips for Troubleshooting
- Double-check all connections for solid contact and correct orientation.
- Use an oscilloscope to monitor the CAN signals for proper levels and integrity.
- Implement software error handling to detect and recover from communication faults.
FAQs
Q: Can I use this shield with a 5V Arduino? A: Yes, the shield is compatible with 5V Arduinos, but the CAN network operates at 24V.
Q: How do I program the Arduino to communicate over CAN?
A: You will need to use a CAN library for Arduino, such as the MCP_CAN library, to handle the CAN communication.
Q: What is the maximum length for the CAN bus wiring? A: The maximum length depends on the baud rate; for lower baud rates, longer lengths are possible. Typically, up to 40 meters at 1 Mbps is acceptable.
Example Arduino Code
#include <mcp_can.h>
#include <SPI.h>
// Initialize CAN controller at CS pin 10
MCP_CAN CAN0(10);
void setup() {
Serial.begin(115200);
// Initialize CAN controller at 500 kbps
if (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN controller initialized");
} else {
Serial.println("CAN controller initialization failed");
}
// Set normal operation mode
CAN0.setMode(MCP_NORMAL);
}
void loop() {
// Check for incoming messages
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
unsigned char len = 0;
unsigned char buf[8];
// Read data: len = data length, buf = data byte(s)
CAN0.readMsgBuf(&len, buf);
// Print received message
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Note: This example assumes the use of the MCP_CAN library for handling CAN communication. Ensure that the library is installed in your Arduino IDE before compiling and uploading the code to your microcontroller.