How to Use Dual Channel Brushed ESC 20A: Examples, Pinouts, and Specs
Introduction
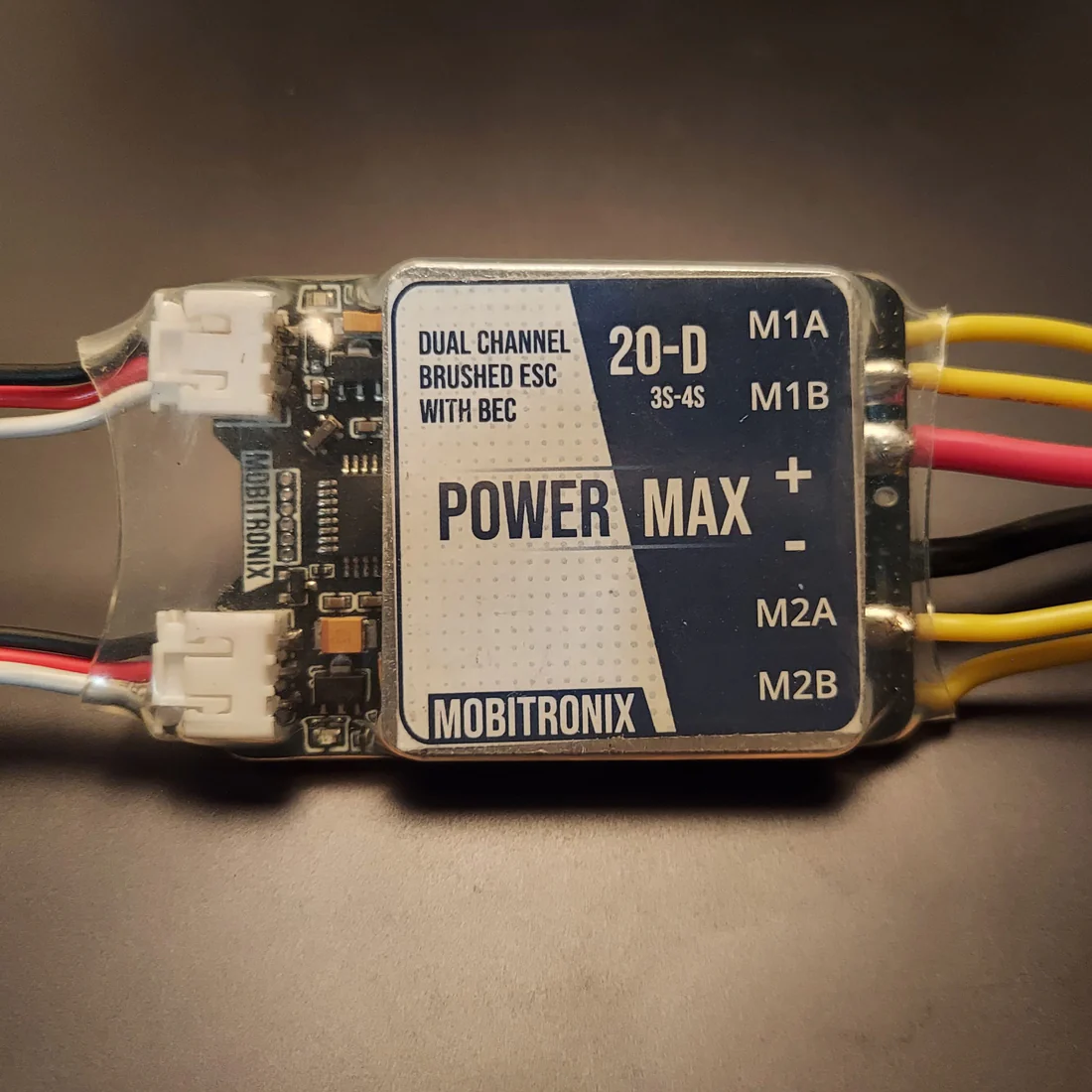
The Dual Channel Brushed ESC 20A (Manufacturer: Mobitronix, Part ID: PowerMax) is a high-performance electronic speed controller designed to control the speed and direction of two brushed DC motors. With a current rating of 20A per channel, this ESC is ideal for applications such as remote-controlled (RC) vehicles, drones, robotics, and other projects requiring precise motor control. Its dual-channel design allows independent control of two motors, making it a versatile choice for multi-motor systems.
Explore Projects Built with Dual Channel Brushed ESC 20A


Explore Projects Built with Dual Channel Brushed ESC 20A
Common Applications
- RC cars, boats, and drones
- Robotics and automation systems
- DIY motorized projects
- Educational and prototyping platforms
Technical Specifications
The following table outlines the key technical details of the Dual Channel Brushed ESC 20A:
| Parameter | Specification |
|---|---|
| Manufacturer | Mobitronix |
| Part ID | PowerMax |
| Motor Type Supported | Brushed DC Motors |
| Channels | 2 (independent control) |
| Continuous Current Rating | 20A per channel |
| Peak Current Rating | 25A per channel (for 10 seconds) |
| Input Voltage Range | 6V to 24V DC |
| PWM Input Signal Range | 1ms to 2ms (standard RC PWM signal) |
| Control Frequency | 50Hz to 500Hz |
| Operating Temperature | -10°C to 60°C |
| Dimensions | 60mm x 40mm x 15mm |
| Weight | 45g |
Pin Configuration and Descriptions
The ESC has the following pin configuration:
Input/Output Connections
| Pin Name | Type | Description |
|---|---|---|
| VIN | Power Input | Positive input voltage (6V to 24V DC). Connect to the power source. |
| GND | Power Input | Ground connection. Connect to the negative terminal of the power source. |
| M1+ | Motor Output | Positive terminal for Motor 1. |
| M1- | Motor Output | Negative terminal for Motor 1. |
| M2+ | Motor Output | Positive terminal for Motor 2. |
| M2- | Motor Output | Negative terminal for Motor 2. |
| PWM1 | Signal Input | PWM signal input for Motor 1 control. |
| PWM2 | Signal Input | PWM signal input for Motor 2 control. |
| EN | Signal Input | Enable pin. Pull HIGH to enable the ESC, LOW to disable it. |
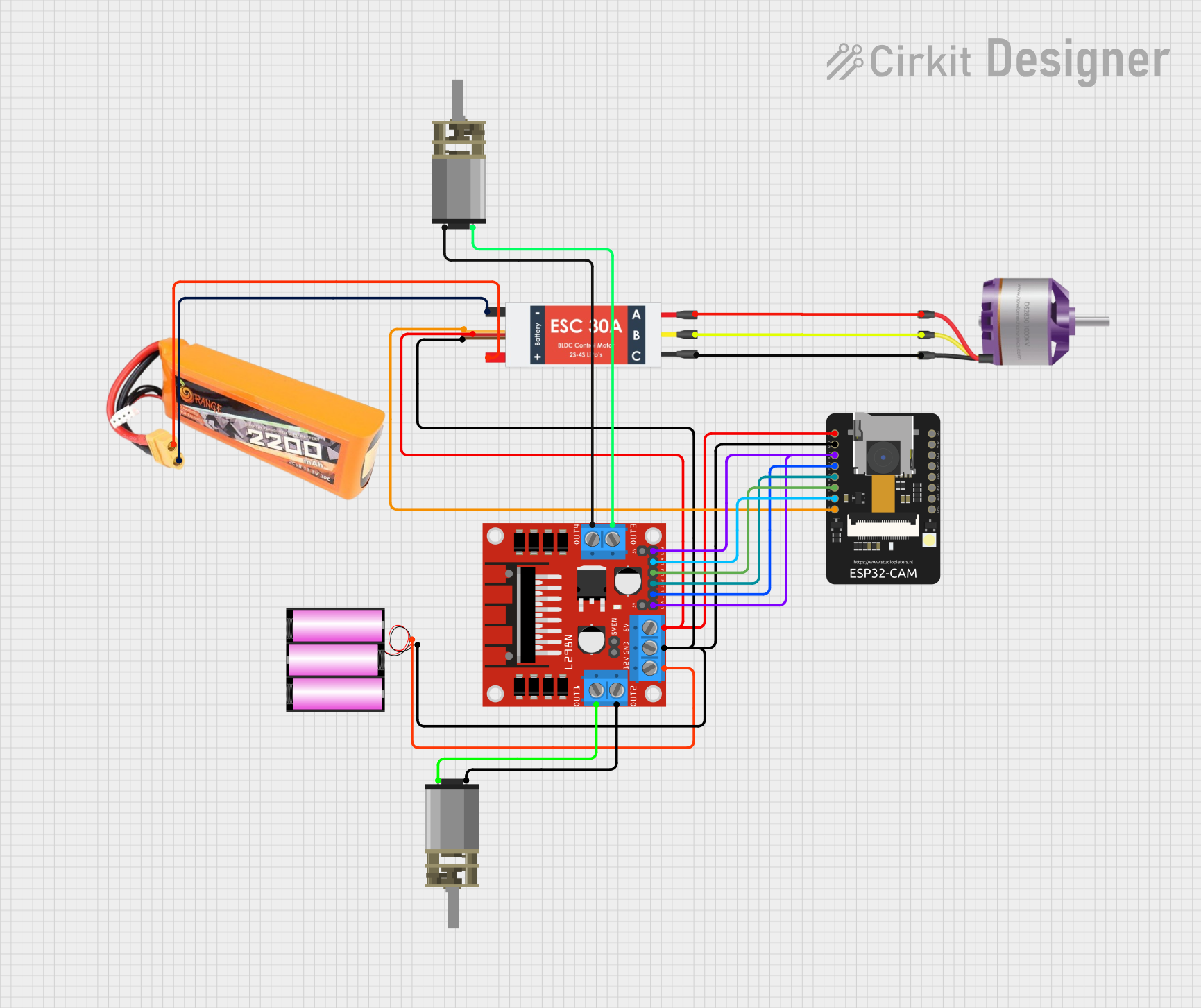
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the VIN and GND pins to a DC power source within the range of 6V to 24V. Ensure the power source can supply sufficient current for the motors.
- Motor Connections: Connect the brushed DC motors to the M1+/M1- and M2+/M2- terminals. Ensure the motors are compatible with the ESC's voltage and current ratings.
- PWM Signal: Provide a PWM signal to the PWM1 and PWM2 pins to control the speed and direction of the motors. A 1ms pulse corresponds to full reverse, 1.5ms to stop, and 2ms to full forward.
- Enable Pin: Pull the EN pin HIGH to enable the ESC. Pull it LOW to disable the ESC.
Important Considerations and Best Practices
- Heat Dissipation: Ensure proper ventilation or use a heatsink if the ESC operates near its maximum current rating for extended periods.
- Power Supply: Use a power source with sufficient current capacity to avoid voltage drops or overheating.
- Signal Integrity: Use shielded cables for PWM signals in noisy environments to prevent interference.
- Motor Compatibility: Verify that the motors' voltage and current ratings are within the ESC's specifications.
Example: Using the ESC with an Arduino UNO
Below is an example of how to control the Dual Channel Brushed ESC 20A using an Arduino UNO:
// Example code to control the Dual Channel Brushed ESC 20A with Arduino UNO
#include <Servo.h> // Include the Servo library to generate PWM signals
Servo motor1; // Create a Servo object for Motor 1
Servo motor2; // Create a Servo object for Motor 2
void setup() {
motor1.attach(9); // Attach Motor 1 PWM signal to pin 9
motor2.attach(10); // Attach Motor 2 PWM signal to pin 10
pinMode(8, OUTPUT); // Set pin 8 as output for the Enable pin
digitalWrite(8, HIGH); // Enable the ESC by pulling the EN pin HIGH
}
void loop() {
// Set Motor 1 to full forward
motor1.writeMicroseconds(2000); // 2ms pulse for full forward
delay(2000); // Run for 2 seconds
// Set Motor 1 to stop
motor1.writeMicroseconds(1500); // 1.5ms pulse to stop
delay(2000); // Wait for 2 seconds
// Set Motor 2 to full reverse
motor2.writeMicroseconds(1000); // 1ms pulse for full reverse
delay(2000); // Run for 2 seconds
// Set Motor 2 to stop
motor2.writeMicroseconds(1500); // 1.5ms pulse to stop
delay(2000); // Wait for 2 seconds
}
Troubleshooting and FAQs
Common Issues and Solutions
Motors Not Spinning
- Cause: The EN pin is not pulled HIGH.
- Solution: Ensure the EN pin is connected to a HIGH signal (e.g., 5V from the Arduino).
Erratic Motor Behavior
- Cause: Noisy or unstable PWM signal.
- Solution: Use shielded cables for PWM signals and ensure the Arduino's ground is connected to the ESC's ground.
Overheating
- Cause: Operating near or above the ESC's current rating for extended periods.
- Solution: Reduce the load on the motors or improve heat dissipation with a heatsink or fan.
No Response from ESC
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check all connections and ensure the power supply meets the voltage and current requirements.
FAQs
Can I use this ESC with a single motor?
- Yes, you can use only one channel of the ESC if your application requires a single motor.
What happens if I exceed the 20A current rating?
- The ESC may overheat or shut down to protect itself. Prolonged overcurrent conditions can damage the ESC.
Can I use this ESC with a LiPo battery?
- Yes, as long as the battery voltage is within the 6V to 24V range.
Is this ESC compatible with other microcontrollers?
- Yes, it can be controlled by any microcontroller capable of generating a standard RC PWM signal.