How to Use NEMA17: Examples, Pinouts, and Specs
Introduction
The NEMA17 is a standard stepper motor size widely used in applications requiring precise motion control. It is characterized by its 1.7 x 1.7 inch (43.2 x 43.2 mm) faceplate and is available in various torque ratings to suit different mechanical requirements. This stepper motor is a popular choice in 3D printers, CNC machines, robotics, and other automation systems due to its reliability, precision, and ease of use.
Explore Projects Built with NEMA17

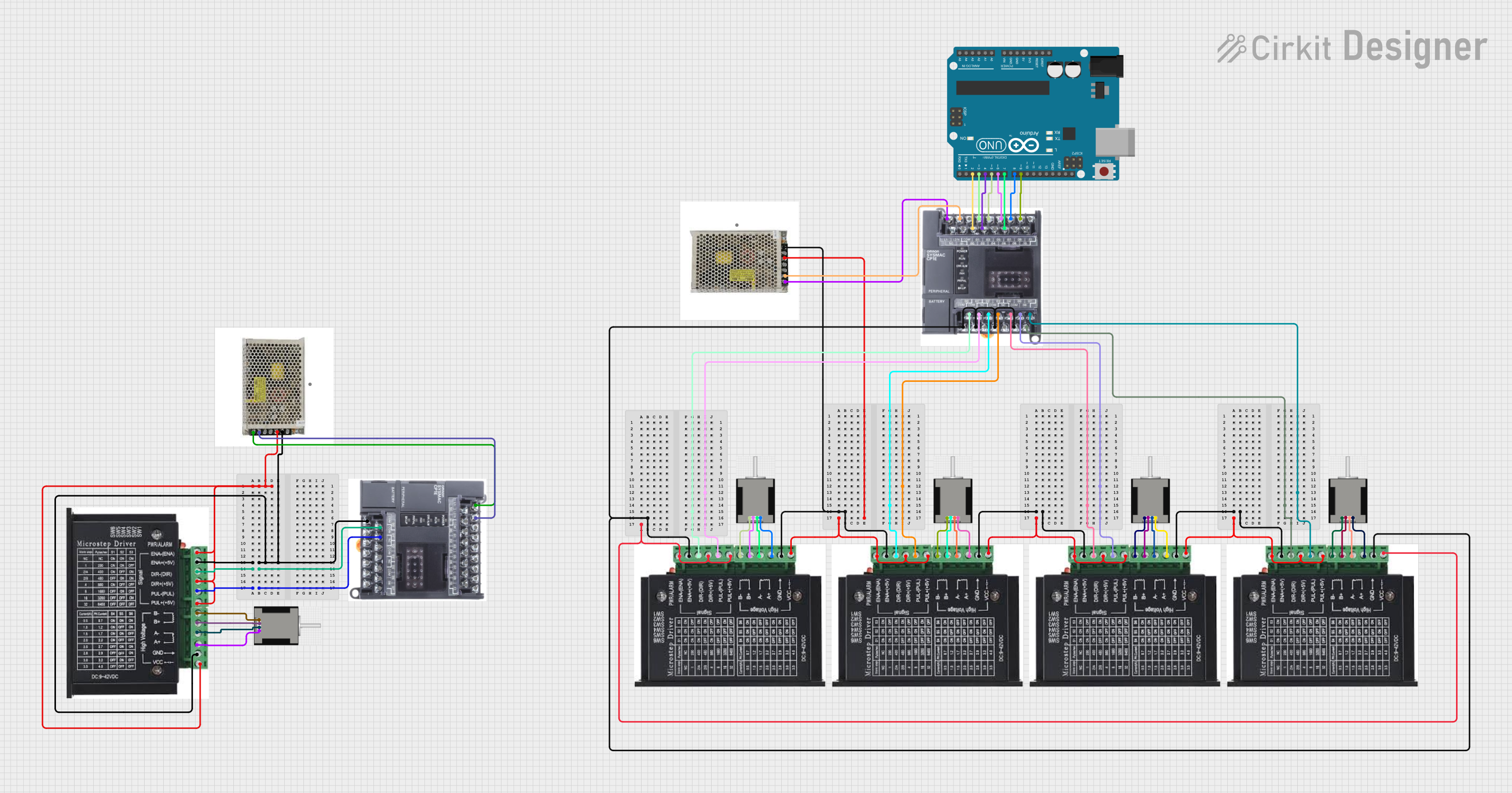
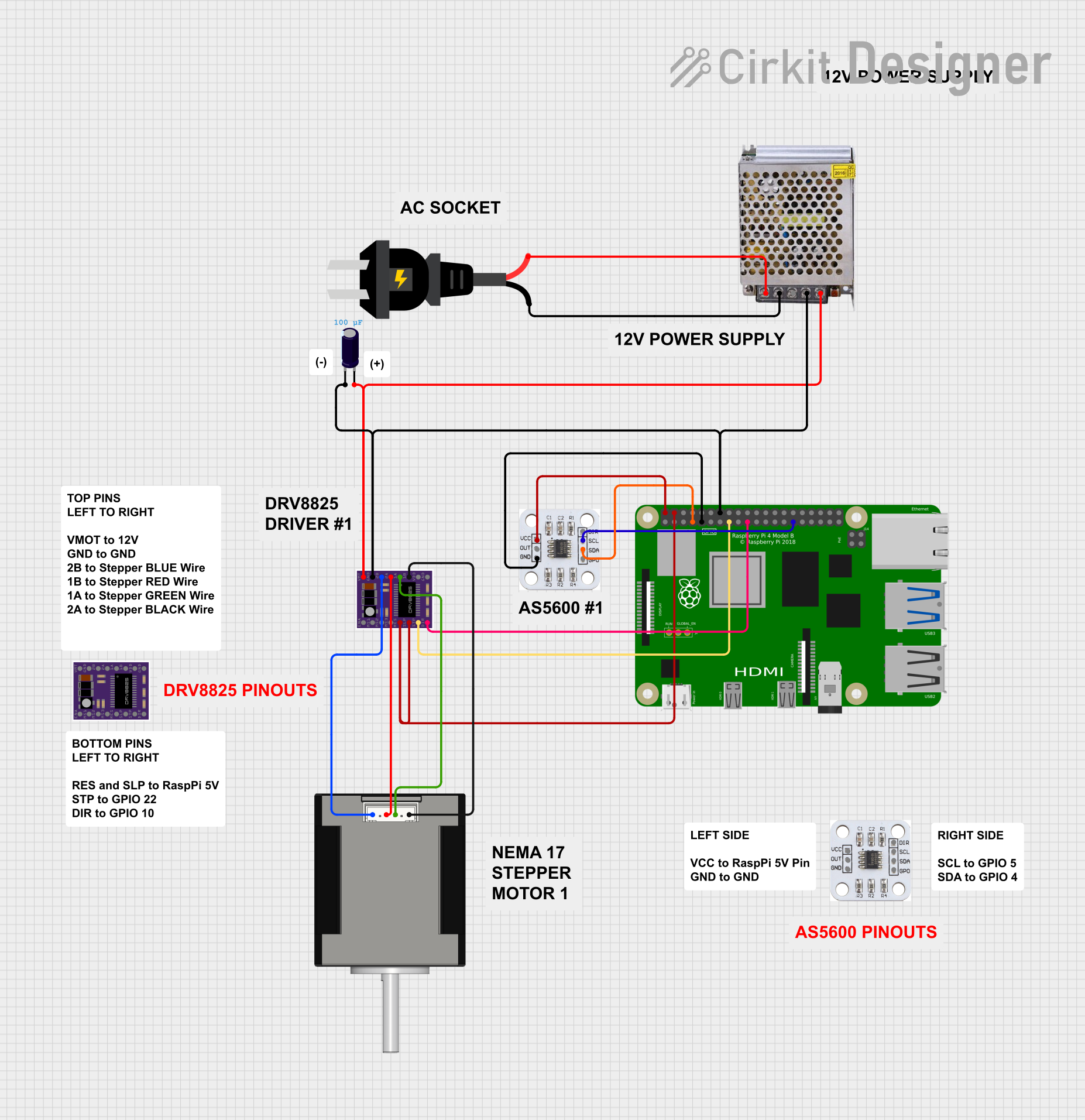
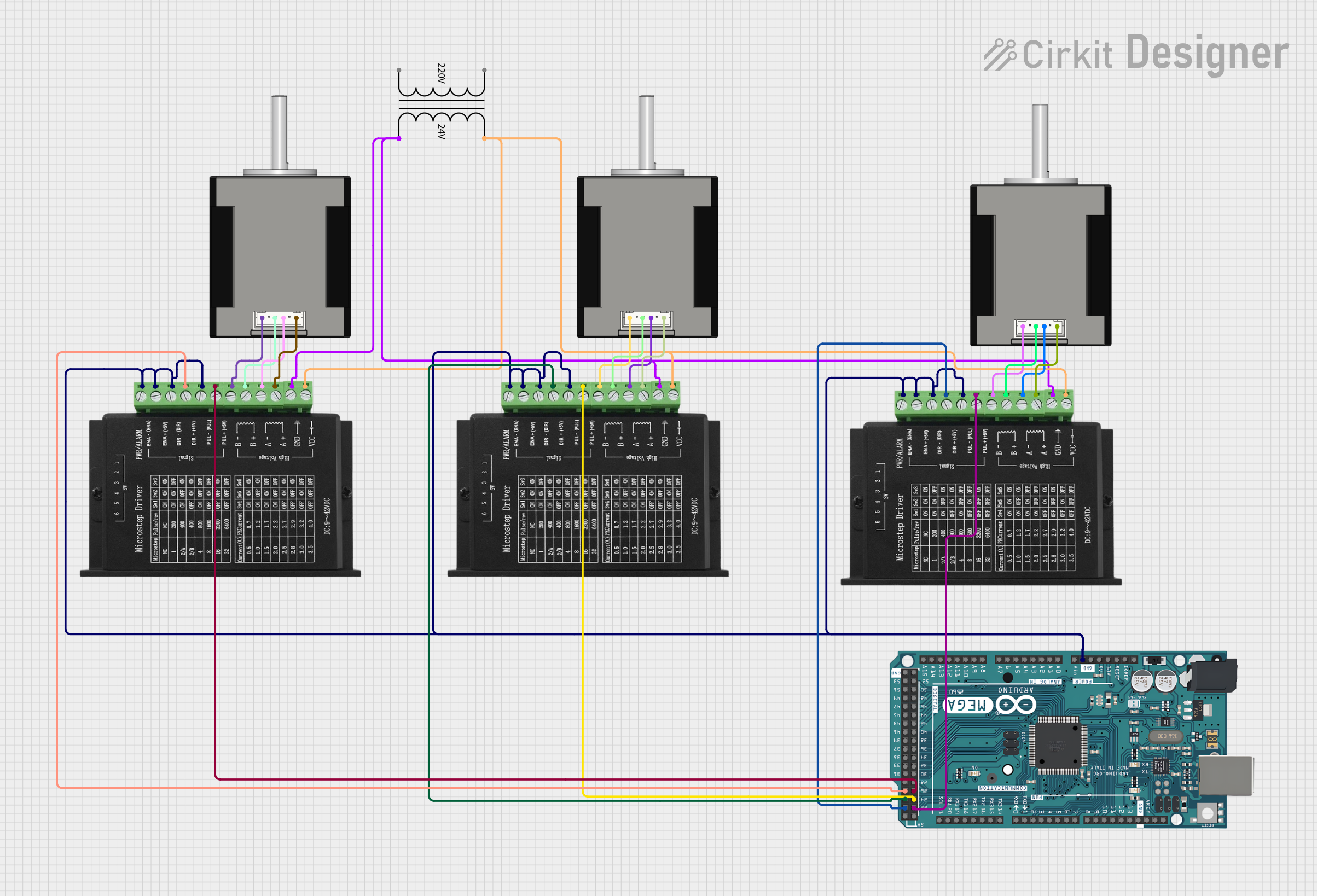
Explore Projects Built with NEMA17
Common Applications
- 3D printers for precise layer-by-layer movement
- CNC machines for accurate cutting and milling
- Robotics for controlled motion and positioning
- Camera sliders and gimbals for smooth motion
- Automated conveyor systems
Technical Specifications
Below are the general technical specifications for a typical NEMA17 stepper motor. Note that specific models may vary slightly, so always refer to the datasheet of your particular motor.
| Parameter | Value |
|---|---|
| Frame Size | 1.7 x 1.7 inches (43.2 x 43.2 mm) |
| Step Angle | 1.8° (200 steps per revolution) |
| Holding Torque | 26-84 oz-in (depending on model) |
| Rated Voltage | 2.8V to 12V (varies by model) |
| Rated Current | 1.2A to 2.0A per phase |
| Resistance per Phase | 1.4Ω to 2.8Ω |
| Inductance per Phase | 2.5mH to 5.5mH |
| Shaft Diameter | 5 mm |
| Number of Leads | 4, 6, or 8 (commonly 4 leads) |
| Weight | ~280g (varies by model) |
Pin Configuration and Descriptions
The NEMA17 stepper motor typically has 4 leads, corresponding to two motor windings. The table below describes the pin configuration for a standard 4-wire NEMA17 motor:
| Lead Color | Function | Description |
|---|---|---|
| Red | Coil A+ | Positive terminal of winding A |
| Blue | Coil A- | Negative terminal of winding A |
| Green | Coil B+ | Positive terminal of winding B |
| Black | Coil B- | Negative terminal of winding B |
For 6-wire or 8-wire variants, additional center-tap or parallel connections may be present. Refer to the motor's datasheet for detailed wiring.
Usage Instructions
How to Use the NEMA17 in a Circuit
- Power Supply: Ensure the power supply matches the motor's voltage and current ratings. Use a stepper motor driver to regulate current and protect the motor.
- Driver Connection: Connect the motor to a stepper motor driver (e.g., A4988 or DRV8825). Match the motor's leads to the driver's output terminals (e.g., A+, A-, B+, B-).
- Microcontroller Interface: Use a microcontroller (e.g., Arduino UNO) to send step and direction signals to the driver. The driver will translate these signals into precise motor movements.
- Step Angle and Microstepping: Configure the driver for the desired step angle and microstepping mode to achieve the required resolution.
Important Considerations
- Current Limiting: Set the current limit on the driver to prevent overheating or damage to the motor.
- Heat Management: NEMA17 motors can get hot during operation. Ensure proper ventilation or heat dissipation.
- Backlash and Coupling: Use appropriate couplers and minimize mechanical backlash for accurate motion.
- Wiring: Double-check wiring to avoid short circuits or incorrect connections.
Example: Controlling NEMA17 with Arduino UNO
Below is an example of controlling a NEMA17 stepper motor using an Arduino UNO and an A4988 driver:
// Include necessary libraries
// No external libraries are required for basic stepper control
// Define pin connections
#define STEP_PIN 3 // Pin connected to the STEP input of the driver
#define DIR_PIN 4 // Pin connected to the DIR input of the driver
void setup() {
pinMode(STEP_PIN, OUTPUT); // Set STEP pin as output
pinMode(DIR_PIN, OUTPUT); // Set DIR pin as output
digitalWrite(DIR_PIN, HIGH); // Set direction (HIGH = clockwise, LOW = counterclockwise)
}
void loop() {
// Generate step pulses to move the motor
digitalWrite(STEP_PIN, HIGH); // Set STEP pin HIGH
delayMicroseconds(1000); // Wait 1 millisecond (adjust for speed)
digitalWrite(STEP_PIN, LOW); // Set STEP pin LOW
delayMicroseconds(1000); // Wait 1 millisecond
}
Notes:
- Adjust the
delayMicroseconds()value to control the motor speed. - Use a power supply that matches the motor's voltage and current requirements.
- Ensure the current limit on the A4988 driver is set correctly to avoid overheating.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving
- Cause: Incorrect wiring or loose connections.
- Solution: Double-check the wiring and ensure all connections are secure.
Motor Vibrates but Does Not Rotate
- Cause: Incorrect step sequence or insufficient current.
- Solution: Verify the step sequence and increase the current limit on the driver.
Motor Overheating
- Cause: Current limit set too high or poor ventilation.
- Solution: Reduce the current limit and ensure proper heat dissipation.
Skipping Steps
- Cause: Excessive load or incorrect microstepping configuration.
- Solution: Reduce the load or adjust the microstepping settings.
Driver Overheating
- Cause: Insufficient cooling or high current settings.
- Solution: Add a heatsink or fan to the driver and lower the current limit.
FAQs
Q: Can I run the NEMA17 without a driver?
A: No, a stepper motor driver is required to control the current and generate the step signals.
Q: How do I identify the motor leads?
A: Use a multimeter to measure resistance. Leads belonging to the same coil will show continuity.
Q: Can I use a higher voltage power supply?
A: Yes, but ensure the driver regulates the current to prevent motor damage.
Q: What is microstepping?
A: Microstepping divides each full step into smaller steps, improving resolution and smoothness.
By following this documentation, you can effectively integrate the NEMA17 stepper motor into your projects for precise and reliable motion control.