How to Use Servo MG996R: Examples, Pinouts, and Specs
Introduction
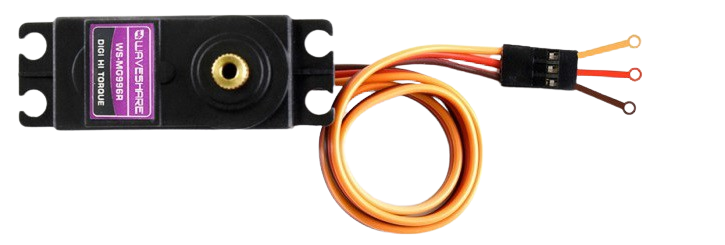
The MG996R is a high-torque servo motor widely used in robotics, automation, and remote-controlled systems. It is known for its robust metal gear design, which ensures durability and reliability under heavy loads. The servo provides precise control of angular position, making it ideal for applications requiring accurate movement, such as robotic arms, RC vehicles, and pan-tilt camera systems. Its wide operating voltage range and high torque output make it a versatile choice for both hobbyists and professionals.
Explore Projects Built with Servo MG996R

Explore Projects Built with Servo MG996R
Technical Specifications
- Model: MG996R
- Operating Voltage: 4.8V to 7.2V
- Stall Torque:
- 9.4 kg·cm at 4.8V
- 11 kg·cm at 6V
- Operating Speed:
- 0.19 sec/60° at 4.8V
- 0.14 sec/60° at 6V
- Control Signal: PWM (Pulse Width Modulation)
- PWM Pulse Range: 500 µs to 2500 µs
- Angle Range: 0° to 180°
- Gear Type: Metal
- Weight: 55g
- Dimensions: 40.7mm x 19.7mm x 42.9mm
Pin Configuration and Descriptions
The MG996R servo motor has a 3-wire interface for power, ground, and control signal. The pinout is as follows:
| Pin Color | Function | Description |
|---|---|---|
| Red | VCC (Power) | Connect to a 4.8V–7.2V power source. |
| Brown | GND (Ground) | Connect to the ground of the circuit. |
| Orange | Signal (PWM) | Receives the PWM signal for control. |
Usage Instructions
How to Use the MG996R in a Circuit
- Power Supply: Connect the red wire to a power source (4.8V–7.2V) capable of supplying sufficient current. The servo can draw up to 2.5A under load, so ensure your power supply can handle this.
- Ground Connection: Connect the brown wire to the ground of your circuit.
- PWM Signal: Connect the orange wire to a PWM-capable pin of your microcontroller (e.g., Arduino UNO). The PWM signal controls the servo's angular position.
Important Considerations
- Power Requirements: Use a separate power supply for the servo if your microcontroller cannot provide sufficient current.
- PWM Signal: Ensure the PWM signal is within the range of 500 µs to 2500 µs for proper operation. A pulse width of 1500 µs corresponds to the neutral position (90°).
- Mechanical Load: Avoid overloading the servo to prevent overheating or damage to the gears.
Example Code for Arduino UNO
The following example demonstrates how to control the MG996R servo using an Arduino UNO:
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a Servo object to control the MG996R
void setup() {
myServo.attach(9); // Attach the servo to pin 9 on the Arduino
}
void loop() {
myServo.write(0); // Move the servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move the servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180); // Move the servo to 180 degrees
delay(1000); // Wait for 1 second
}
Best Practices
- Use a capacitor (e.g., 1000 µF) across the power supply to stabilize voltage and prevent noise.
- Avoid sudden changes in position to reduce stress on the servo motor.
- Test the servo without load before integrating it into your project.
Troubleshooting and FAQs
Common Issues and Solutions
Servo Not Moving:
- Cause: Insufficient power supply.
- Solution: Ensure the power source provides 4.8V–7.2V and sufficient current (up to 2.5A).
Servo Jittering:
- Cause: Noisy or unstable PWM signal.
- Solution: Use a clean PWM signal and ensure proper grounding.
Overheating:
- Cause: Prolonged operation under heavy load.
- Solution: Reduce the load or allow the servo to cool down periodically.
Limited Movement Range:
- Cause: Incorrect PWM signal range.
- Solution: Verify that the PWM signal is within the 500 µs to 2500 µs range.
FAQs
Q: Can I power the MG996R directly from the Arduino UNO?
A: No, the Arduino UNO cannot supply enough current for the servo. Use an external power source.Q: What is the maximum angle the MG996R can rotate?
A: The MG996R can rotate up to 180°.Q: Can I use the MG996R for continuous rotation?
A: No, the MG996R is designed for positional control, not continuous rotation.Q: How do I prevent the servo from drawing too much current?
A: Use a current-limiting resistor or a dedicated servo driver circuit.
By following this documentation, you can effectively integrate the MG996R servo motor into your projects and troubleshoot common issues.