How to Use DM556T: Examples, Pinouts, and Specs
Introduction
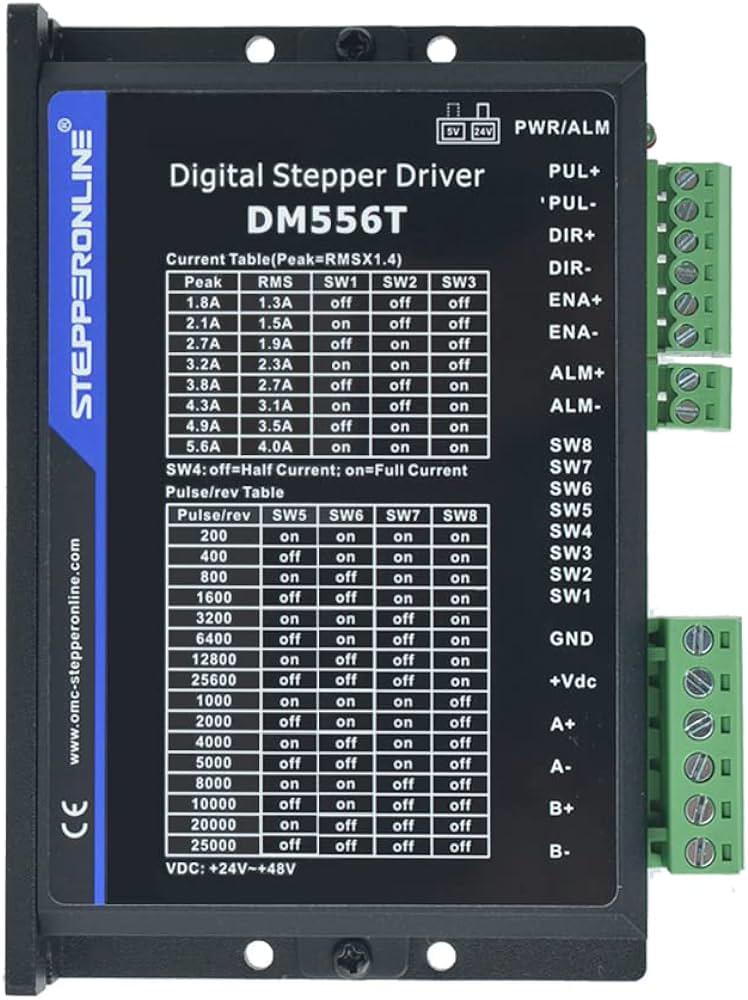
The DM556T is a high-performance digital stepper motor driver manufactured by Stepper Online. It is designed to provide precise control of stepper motors, supporting microstepping and offering robust protection features such as over-current, over-voltage, and short-circuit protection. This driver is suitable for a wide range of applications, including CNC machines, 3D printers, robotics, and other automation systems.
Explore Projects Built with DM556T

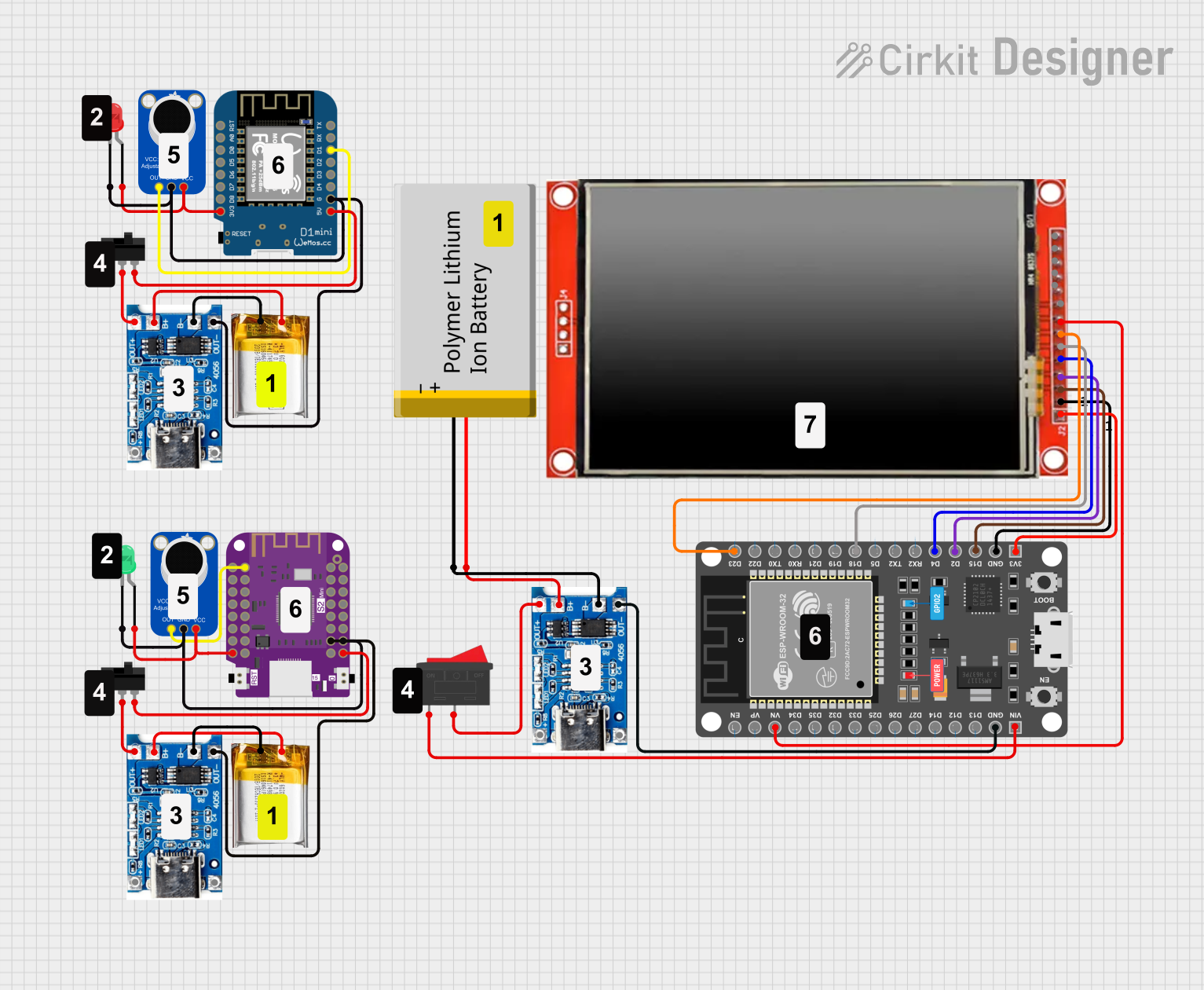
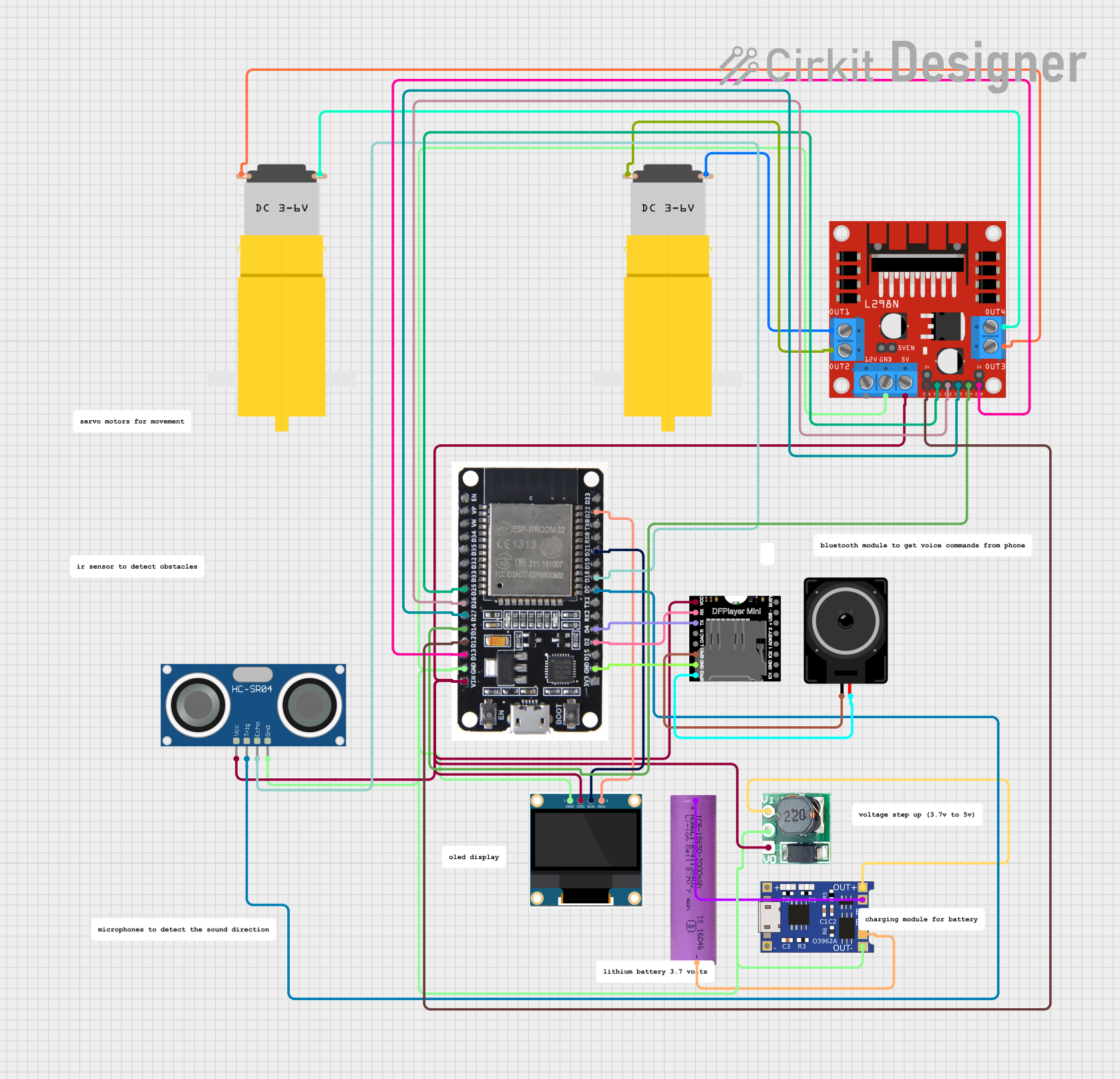
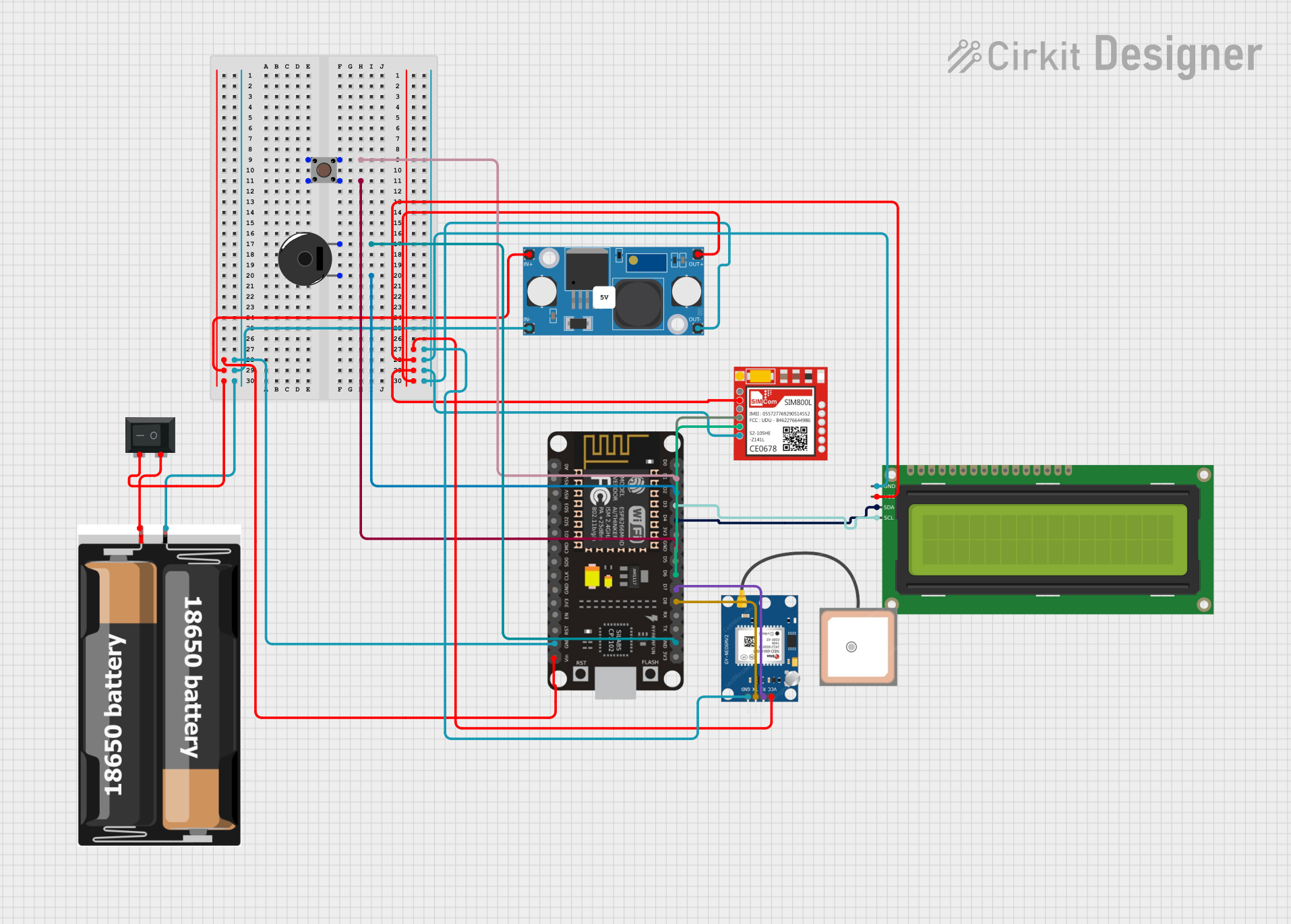
Explore Projects Built with DM556T
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Manufacturer | Stepper Online |
| Part ID | Digital Stepper Driver 1.8-5.6A 20-50VDC |
| Input Voltage | 20-50VDC |
| Output Current | 1.8-5.6A |
| Microstepping | Up to 256 microsteps per full step |
| Protection Features | Over-current, over-voltage, short-circuit |
| Motor Compatibility | Nema 23, 24, 34 Stepper Motors |
Pin Configuration and Descriptions
Power and Motor Connections
| Pin Name | Description | Notes |
|---|---|---|
| PUL+ | Pulse signal input (+) | Connect to controller pulse output |
| PUL- | Pulse signal input (-) | Connect to controller ground |
| DIR+ | Direction signal input (+) | Connect to controller direction output |
| DIR- | Direction signal input (-) | Connect to controller ground |
| ENA+ | Enable signal input (+) | Optional, connect to controller enable output |
| ENA- | Enable signal input (-) | Optional, connect to controller ground |
| A+ | Motor phase A+ | Connect to stepper motor phase A+ |
| A- | Motor phase A- | Connect to stepper motor phase A- |
| B+ | Motor phase B+ | Connect to stepper motor phase B+ |
| B- | Motor phase B- | Connect to stepper motor phase B- |
| VCC | Power supply input (+) | Connect to 20-50VDC power supply |
| GND | Power supply input (-) | Connect to power supply ground |
Usage Instructions
How to Use the DM556T in a Circuit
Power Supply Connection: Connect the VCC and GND pins to a 20-50VDC power supply. Ensure the power supply can provide sufficient current for the stepper motor.
Motor Connection: Connect the A+, A-, B+, and B- pins to the corresponding phases of the stepper motor.
Control Signal Connection: Connect the PUL+, PUL-, DIR+, DIR-, ENA+, and ENA- pins to the appropriate control signals from your controller (e.g., Arduino, CNC controller).
Microstepping Configuration: Set the microstepping resolution using the DIP switches on the driver. Refer to the driver’s datasheet for the correct switch settings.
Enable Protection Features: Ensure that the driver is properly mounted and has adequate cooling to prevent overheating. The driver’s built-in protection features will help safeguard against over-current, over-voltage, and short-circuit conditions.
Important Considerations and Best Practices
- Cooling: Ensure adequate ventilation or cooling for the driver to prevent overheating.
- Wiring: Use appropriate gauge wires for power and motor connections to handle the current requirements.
- Signal Integrity: Keep control signal wires short and shielded if possible to reduce noise and interference.
- Power Supply: Use a stable and regulated power supply to avoid voltage fluctuations that could affect performance.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving:
- Check Power Supply: Ensure the power supply is connected and providing the correct voltage.
- Verify Connections: Double-check all wiring connections, especially the motor and control signal connections.
- Control Signals: Ensure the controller is sending the correct pulse and direction signals.
Overheating:
- Cooling: Ensure the driver has adequate cooling and ventilation.
- Current Setting: Verify that the current setting on the driver matches the motor’s rated current.
Erratic Motor Movement:
- Signal Noise: Check for noise or interference in the control signal wires.
- Microstepping Settings: Verify the microstepping settings on the DIP switches.
FAQs
Q: Can I use the DM556T with an Arduino UNO? A: Yes, the DM556T can be controlled using an Arduino UNO. Below is an example code to control a stepper motor using the DM556T and Arduino UNO.
// Arduino UNO example code to control a stepper motor using DM556T
const int pulsePin = 9; // Pulse signal pin
const int dirPin = 8; // Direction signal pin
const int enablePin = 7; // Enable signal pin (optional)
void setup() {
pinMode(pulsePin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enablePin, OUTPUT);
digitalWrite(enablePin, LOW); // Enable the driver
digitalWrite(dirPin, HIGH); // Set direction
}
void loop() {
digitalWrite(pulsePin, HIGH); // Generate a pulse
delayMicroseconds(500); // Pulse width
digitalWrite(pulsePin, LOW);
delayMicroseconds(500); // Pulse interval
}
Q: How do I set the microstepping resolution? A: The microstepping resolution is set using the DIP switches on the driver. Refer to the driver’s datasheet for the correct switch settings for your desired microstepping resolution.
Q: What should I do if the driver’s protection features are triggered? A: If the driver’s protection features are triggered (e.g., over-current, over-voltage), first power off the system and check for wiring issues or component failures. Ensure the power supply voltage is within the specified range and that the motor current settings are correct.
By following this documentation, users can effectively utilize the DM556T digital stepper motor driver in their projects, ensuring reliable and precise control of stepper motors.