How to Use TMC5160-BOB: Examples, Pinouts, and Specs
Introduction
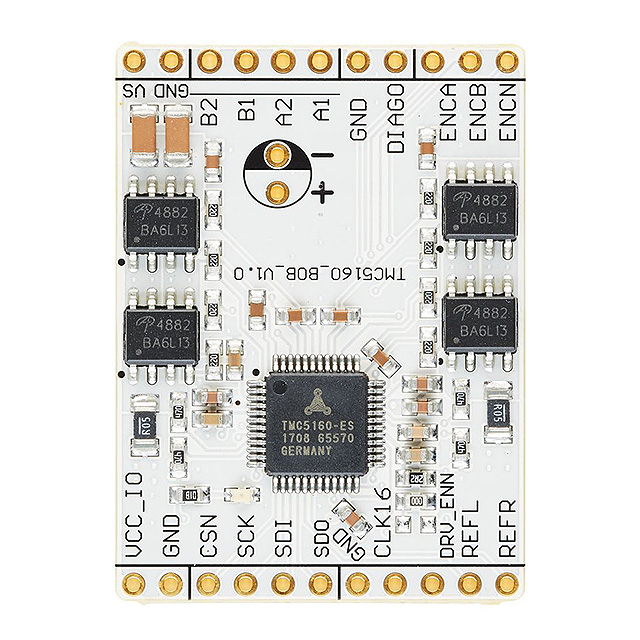
The TMC5160-BOB is a breakout board specifically designed to facilitate the use of the TMC5160 stepper motor driver IC, manufactured by Trinamic, now part of Maxim Integrated. This board simplifies the process of controlling stepper motors for applications such as 3D printers, CNC machines, and robotics. The TMC5160-BOB provides an accessible interface to the sophisticated features of the TMC5160 driver, including high-resolution microstepping, sensorless load detection, and stealthChop2 for silent operation.
Explore Projects Built with TMC5160-BOB

Explore Projects Built with TMC5160-BOB
Common Applications and Use Cases
- 3D Printers
- CNC Machines
- Robotics
- Precision Positioning Systems
- Automated Equipment
Technical Specifications
Key Technical Details
- Motor Supply Voltage (VM): 8 - 35 V
- Logic Supply Voltage (VIO): 3.3 - 5 V
- Phase Current: Up to 2.8A RMS, 4A Peak
- Microstepping: Up to 1/256
- Interface: SPI
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | GND | Ground connection |
| 2 | VM | Motor supply voltage (8-35V) |
| 3 | VIO | Logic supply voltage (3.3-5V) |
| 4 | EN | Enable motor output (active low) |
| 5 | MS1 | Microstep selection 1 |
| 6 | MS2 | Microstep selection 2 |
| 7 | DIAG0 | Diagnostic output |
| 8 | STEP | Step input |
| 9 | DIR | Direction input |
| 10 | GND | Ground connection |
| ... | ... | ... |
Note: This is a partial list. Refer to the TMC5160 datasheet for the full pinout and descriptions.
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect a suitable power supply to the VM and GND pins for the motor and VIO for the logic level.
- Motor Connection: Attach the stepper motor wires to the respective phase outputs on the breakout board.
- Control Signals: Connect the STEP and DIR pins to the controlling microcontroller or processor to input stepping signals and direction control.
- Microstepping Configuration: Set the microstepping resolution by configuring the MS1 and MS2 pins according to the desired setting.
- Enable Motor: The EN pin can be used to enable or disable the motor output. Pull this pin low to enable the motor.
Important Considerations and Best Practices
- Ensure that the power supply voltage does not exceed the specified limits for VM and VIO.
- Use proper decoupling capacitors close to the board to minimize voltage spikes.
- Configure the current limit according to the motor specifications to prevent damage.
- Implement proper cooling if operating the driver at high currents for extended periods.
- Always disconnect power before making or changing connections to the board.
Troubleshooting and FAQs
Common Issues Users Might Face
- Motor not moving: Check power supply, connections, and ensure that the EN pin is pulled low.
- Overheating: Verify current settings and improve cooling if necessary.
- Noise during operation: Adjust stealthChop2 settings or check for mechanical obstructions.
Solutions and Tips for Troubleshooting
- Double-check wiring and solder joints for any loose connections or shorts.
- Use a multimeter to verify power supply voltages and continuity of connections.
- Consult the TMC5160 datasheet for detailed configuration and troubleshooting information.
FAQs
Q: Can I use the TMC5160-BOB with an Arduino UNO? A: Yes, the TMC5160-BOB can be controlled with an Arduino UNO using digital I/O pins for STEP, DIR, and EN signals, and SPI for configuration.
Q: What is the maximum current the TMC5160-BOB can handle? A: The TMC5160-BOB can handle up to 2.8A RMS per phase without additional cooling.
Q: How do I set the current limit on the TMC5160-BOB? A: The current limit is set via SPI commands. Refer to the TMC5160 datasheet for the specific register settings.
Example Code for Arduino UNO
#include <SPI.h>
// Define pin connections & motor interface
#define EN_PIN 8 // Enable
#define DIR_PIN 7 // Direction
#define STEP_PIN 6 // Step
#define CS_PIN 5 // Chip select for SPI
#define MOSI_PIN 11 // Master Out Slave In for SPI
#define MISO_PIN 12 // Master In Slave Out for SPI
#define SCK_PIN 13 // Serial Clock for SPI
void setup() {
pinMode(EN_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
pinMode(CS_PIN, OUTPUT);
// Set the initial states
digitalWrite(EN_PIN, LOW); // Enable driver in active low
digitalWrite(DIR_PIN, HIGH); // Set direction
digitalWrite(CS_PIN, HIGH); // Deselect chip
// Initialize SPI
SPI.begin();
SPI.beginTransaction(SPISettings(1000000, MSBFIRST, SPI_MODE3));
// Send configuration to TMC5160 via SPI
// Example: Write to CHOPCONF register (0x6B)
digitalWrite(CS_PIN, LOW);
SPI.transfer(0x6B); // Address byte
SPI.transfer(0x00); // Data byte 1
SPI.transfer(0x00); // Data byte 2
SPI.transfer(0x00); // Data byte 3
SPI.transfer(0x00); // Data byte 4
digitalWrite(CS_PIN, HIGH);
}
void loop() {
// Create a simple stepping pattern
digitalWrite(STEP_PIN, HIGH);
delay(1); // Wait 1ms
digitalWrite(STEP_PIN, LOW);
delay(1); // Wait 1ms
}
Note: The above code is a basic example to get started. For full functionality, additional configuration via SPI is required. Refer to the TMC5160 datasheet for detailed register settings and advanced features.
This documentation is provided for informational purposes only and is subject to change without notice. The TMC5160-BOB breakout board is a product of Trinamic, and all trademarks are the property of their respective owners.