How to Use XKC-Y26-V: Examples, Pinouts, and Specs

Introduction
The XKC-Y26-V is a non-contact capacitive liquid level sensor manufactured by DFRobot. This sensor is designed to detect the presence or absence of liquid across a non-metallic container wall. It operates on the principle of capacitive sensing, which allows it to detect liquid levels without direct contact, thus avoiding contamination and corrosion issues associated with traditional contact-based sensors. Common applications include water level monitoring in tanks, aquariums, and industrial equipment.
Explore Projects Built with XKC-Y26-V
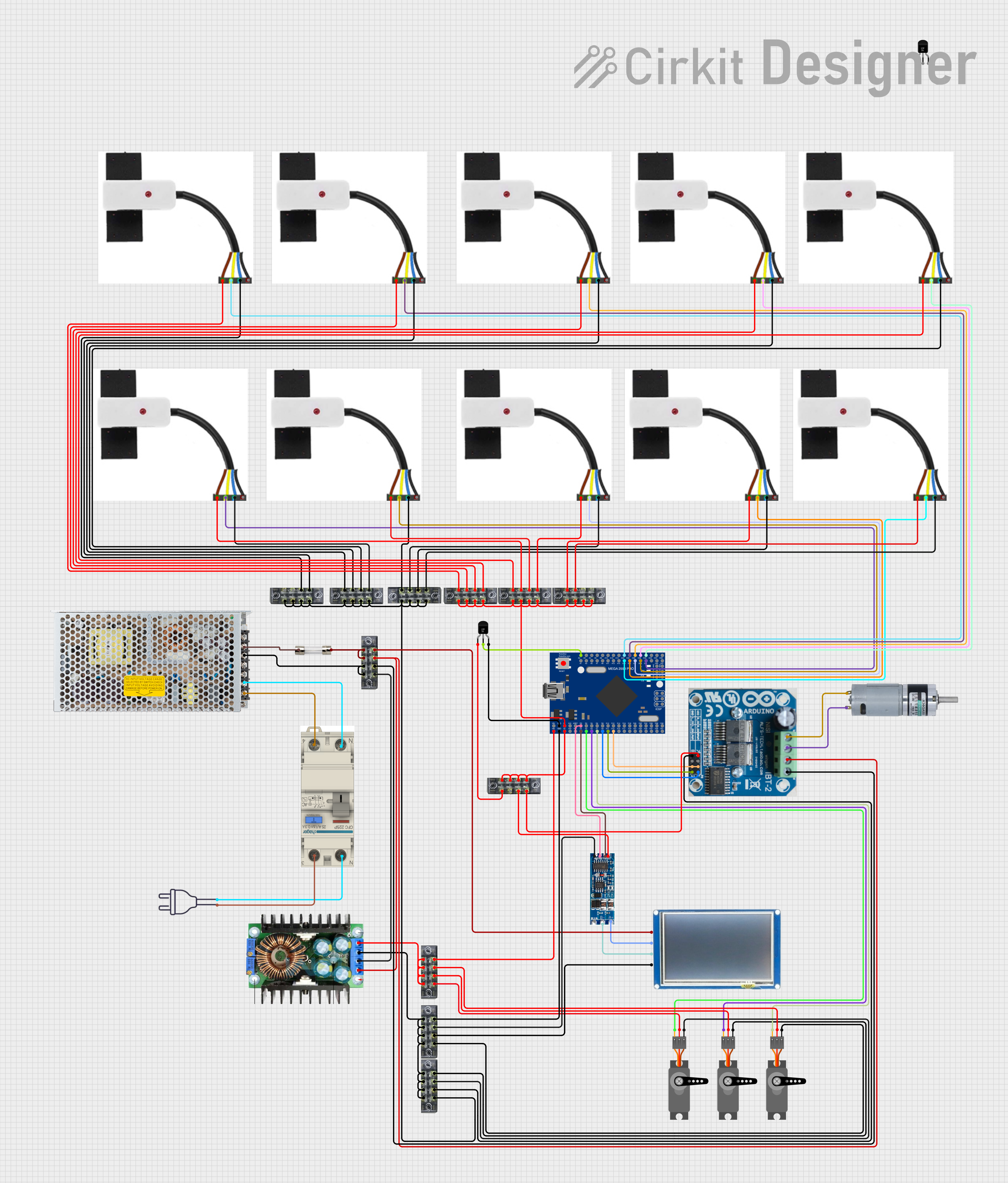
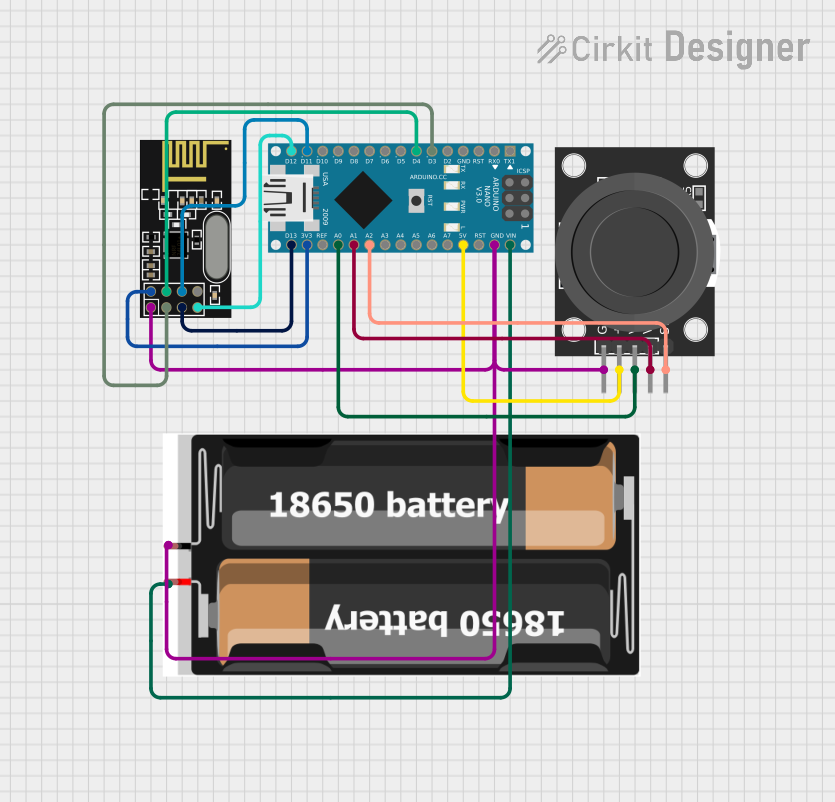
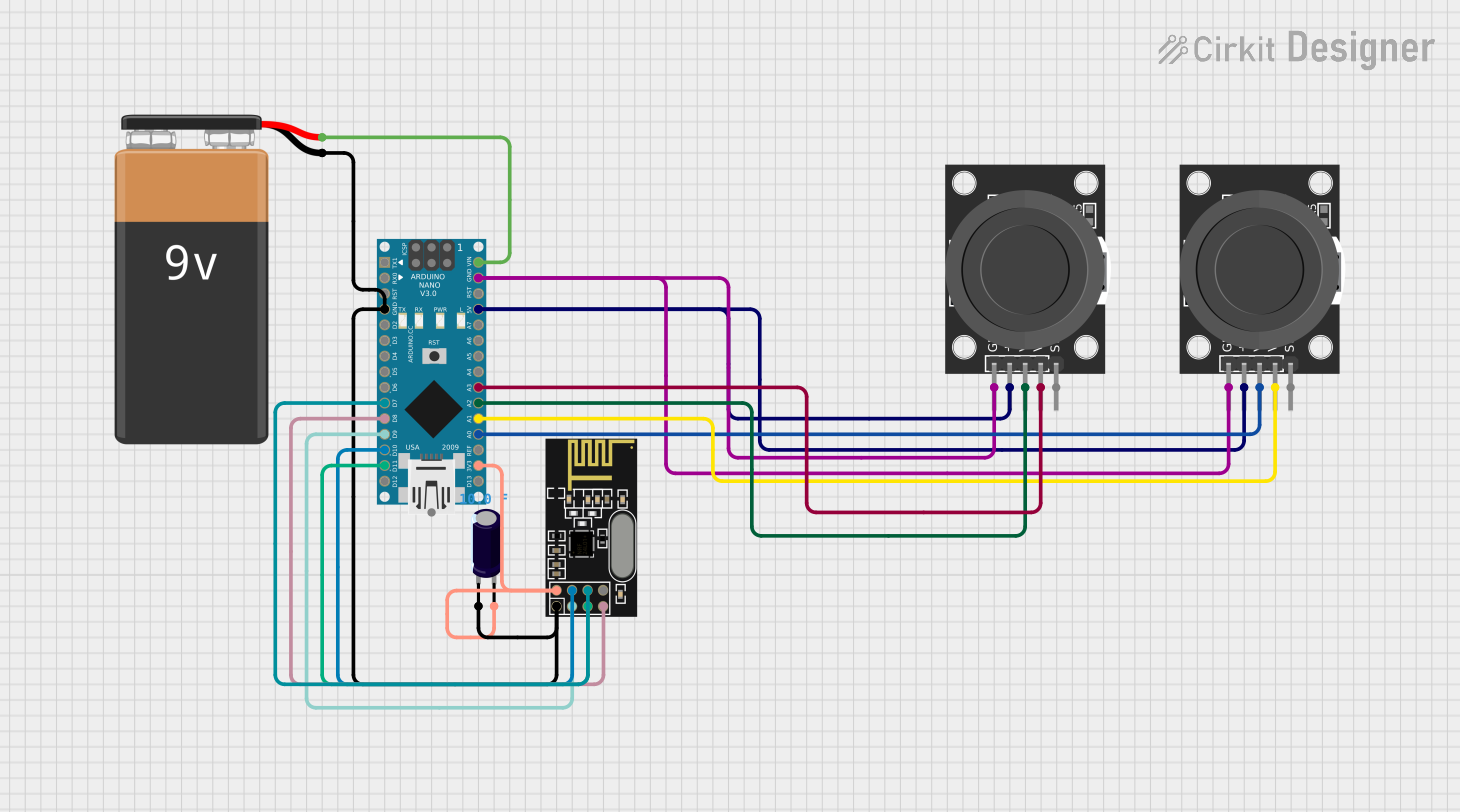
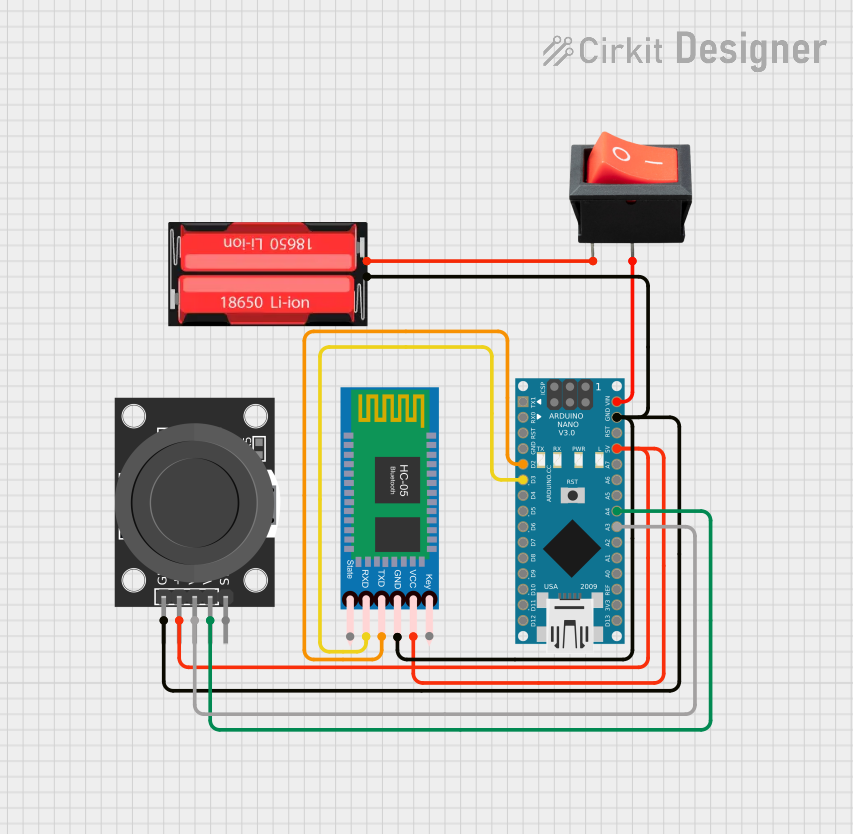
Explore Projects Built with XKC-Y26-V
Technical Specifications
General Specifications:
- Operating Voltage: 5V to 24V DC
- Output Voltage (High Level): >4.5V
- Output Voltage (Low Level): <0.5V
- Current Consumption: 5mA
- Detection Thickness (Container Wall): 0 to 13mm
- Operating Temperature: -20°C to 105°C
- Output Type: Digital signal (high/low level)
- Material: ABS
- Waterproof Grade: IP67
Pin Configuration and Descriptions:
| Pin Number | Description | Notes |
|---|---|---|
| 1 | VCC | Connect to 5V to 24V DC |
| 2 | GND | Connect to ground |
| 3 | Signal Output (OUT) | Digital output (high/low level) |
Usage Instructions
Integration with a Circuit:
- Connect the VCC pin to a power supply ranging from 5V to 24V DC.
- Connect the GND pin to the ground of the power supply.
- Connect the Signal Output pin to a digital input pin on a microcontroller, such as an Arduino UNO.
Best Practices:
- Ensure that the container wall thickness is within the sensor's detection range (0 to 13mm).
- Avoid placing the sensor near materials that can affect its capacitance, such as metals or conductive liquids.
- Keep the sensor away from high-temperature sources to prevent damage.
- For outdoor applications, ensure that the sensor's IP67 waterproof rating is maintained.
Example Code for Arduino UNO
// Define the pin connected to the sensor's output
const int liquidLevelPin = 2;
void setup() {
pinMode(liquidLevelPin, INPUT); // Set the liquid level pin as an input
Serial.begin(9600); // Start serial communication at 9600 baud
}
void loop() {
int sensorState = digitalRead(liquidLevelPin); // Read the sensor output
if (sensorState == HIGH) {
Serial.println("Liquid detected!"); // Liquid level is high
} else {
Serial.println("No liquid detected."); // Liquid level is low
}
delay(1000); // Wait for 1 second before reading again
}
Troubleshooting and FAQs
Common Issues:
- Sensor not responding: Ensure that the sensor is properly powered and the pins are correctly connected.
- Inaccurate readings: Verify that the container wall thickness is within the specified range and that there are no conductive materials nearby.
- Intermittent signals: Check for any water or moisture on the sensor that might be affecting its operation.
FAQs:
Q: Can the sensor detect any type of liquid? A: The sensor is designed to detect most types of liquids, but its performance may vary with different dielectric constants.
Q: Is the sensor safe to use with corrosive liquids? A: Yes, as a non-contact sensor, it does not come into direct contact with the liquid, making it suitable for use with corrosive substances.
Q: Can the sensor detect liquid through any material? A: The sensor can detect liquid through non-metallic materials such as plastic or glass, within the specified thickness range.
For further assistance, please contact DFRobot's technical support.