How to Use Heltec T114: Examples, Pinouts, and Specs
Introduction
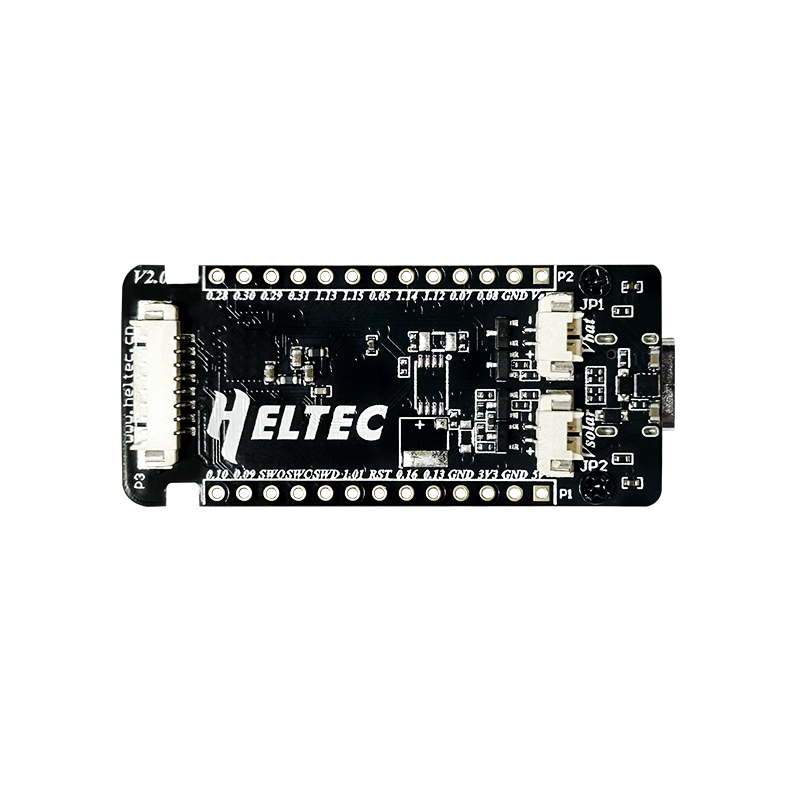
The Heltec T114 is a compact and versatile development board designed for Internet of Things (IoT) applications. Powered by the ESP32 microcontroller, it offers built-in Wi-Fi and Bluetooth connectivity, making it ideal for wireless communication projects. The board also features an integrated OLED display for visual output, along with multiple GPIO pins for connecting sensors, actuators, and other peripherals. Its small form factor and rich feature set make it a popular choice for prototyping and deploying IoT solutions.
Explore Projects Built with Heltec T114

Explore Projects Built with Heltec T114
Common Applications and Use Cases
- Smart home automation systems
- Wireless sensor networks
- Wearable devices
- Data logging and monitoring
- IoT prototyping and development
- Educational projects and workshops
Technical Specifications
Below are the key technical details of the Heltec T114:
| Specification | Details |
|---|---|
| Microcontroller | ESP32 (dual-core, 32-bit processor) |
| Clock Speed | Up to 240 MHz |
| Flash Memory | 4 MB |
| SRAM | 520 KB |
| Connectivity | Wi-Fi 802.11 b/g/n, Bluetooth 4.2 (BLE and Classic) |
| Display | 0.96-inch OLED (128x64 resolution) |
| GPIO Pins | 21 (including ADC, DAC, I2C, SPI, UART, PWM) |
| Operating Voltage | 3.3V |
| Input Voltage Range | 5V (via USB) or 3.7V (via LiPo battery) |
| Power Consumption | Low power consumption with deep sleep mode |
| Dimensions | 41 x 25 mm |
Pin Configuration and Descriptions
The Heltec T114 features a variety of pins for interfacing with external components. Below is the pinout description:
| Pin Name | Type | Description |
|---|---|---|
| GND | Power | Ground connection |
| 3V3 | Power | 3.3V power output |
| VIN | Power | Input voltage (5V via USB or 3.7V via LiPo battery) |
| GPIO0 | Digital I/O | General-purpose I/O, also used for boot mode selection |
| GPIO1 | UART TX | UART transmit pin |
| GPIO3 | UART RX | UART receive pin |
| GPIO21 | I2C SDA | I2C data line |
| GPIO22 | I2C SCL | I2C clock line |
| GPIO25 | DAC1 | Digital-to-Analog Converter output |
| GPIO26 | DAC2 | Digital-to-Analog Converter output |
| GPIO32 | ADC1 | Analog-to-Digital Converter input |
| RST | Reset | Resets the microcontroller |
Usage Instructions
How to Use the Heltec T114 in a Circuit
Powering the Board:
- Connect the board to a computer or USB power source using a micro-USB cable.
- Alternatively, connect a 3.7V LiPo battery to the VIN and GND pins for portable operation.
Programming the Board:
- Install the Arduino IDE and add the ESP32 board support package.
- Select "Heltec ESP32" as the board type in the Arduino IDE.
- Connect the board to your computer via USB and upload your code.
Using the OLED Display:
- The built-in OLED display can be controlled using the
U8g2orAdafruit_SSD1306library. - Connect the display to the I2C pins (GPIO21 for SDA and GPIO22 for SCL).
- The built-in OLED display can be controlled using the
Connecting Sensors and Peripherals:
- Use the GPIO pins to interface with sensors, actuators, or other devices.
- Ensure that the connected devices operate at 3.3V logic levels to avoid damage.
Important Considerations and Best Practices
- Voltage Levels: The GPIO pins operate at 3.3V. Avoid applying 5V directly to the pins.
- Deep Sleep Mode: Use the deep sleep mode to reduce power consumption in battery-powered applications.
- Boot Mode: To enter boot mode, hold down the GPIO0 button while pressing the reset button.
- Heat Management: The ESP32 can get warm during operation. Ensure proper ventilation if used in an enclosure.
Example Code for Arduino UNO Integration
Below is an example of how to display text on the OLED screen using the U8g2 library:
#include <Wire.h>
#include <U8g2lib.h>
// Initialize the OLED display using I2C communication
U8G2_SSD1306_128X64_NONAME_F_HW_I2C u8g2(U8G2_R0, /* reset=*/ U8X8_PIN_NONE);
void setup() {
u8g2.begin(); // Initialize the display
}
void loop() {
u8g2.clearBuffer(); // Clear the display buffer
u8g2.setFont(u8g2_font_ncenB08_tr); // Set font style and size
u8g2.drawStr(0, 24, "Hello, Heltec!"); // Display text at (x=0, y=24)
u8g2.sendBuffer(); // Send the buffer to the display
delay(1000); // Wait for 1 second
}
Troubleshooting and FAQs
Common Issues and Solutions
The board is not detected by the computer:
- Ensure the USB cable is functional and supports data transfer.
- Install the correct USB-to-serial driver for the Heltec T114.
OLED display is not working:
- Verify the I2C connections (SDA to GPIO21, SCL to GPIO22).
- Check the I2C address of the display (default is
0x3C).
Code upload fails:
- Ensure the correct board and port are selected in the Arduino IDE.
- Hold down the GPIO0 button while pressing the reset button to enter boot mode.
Wi-Fi or Bluetooth is not connecting:
- Double-check the SSID and password for Wi-Fi connections.
- Ensure the Bluetooth device is discoverable and within range.
FAQs
Can I power the board with a 5V power supply?
Yes, you can power the board via the USB port or the VIN pin with 5V.What is the maximum current draw of the board?
The maximum current draw is approximately 500 mA during peak operation.Is the OLED display removable?
No, the OLED display is soldered to the board and is not designed to be removed.Can I use the Heltec T114 with other IDEs?
Yes, the board is compatible with other IDEs like PlatformIO and Espressif's ESP-IDF.