Cirkit Designer
Your all-in-one circuit design IDE
Home /
Component Documentation
How to Use motor and wheels: Examples, Pinouts, and Specs

Introduction
- The motor and wheels component is a fundamental part of robotics and automation systems. It consists of a motor (typically a DC motor or stepper motor) connected to wheels, enabling movement and mobility for robots, vehicles, or other mechanical systems.
- Common applications include robotic cars, automated guided vehicles (AGVs), conveyor systems, and educational robotics projects.
Explore Projects Built with motor and wheels
Battery-Powered Dual Gearmotor Drive System

This circuit consists of a 6V battery pack connected in parallel to two DC gearmotors, one for the left wheel and one for the right wheel of a vehicle. The battery provides power directly to both motors, enabling them to run simultaneously. As there is no control circuitry or microcontroller code provided, the motors will run continuously when the circuit is powered.
Arduino-Controlled Robotic Vehicle with IR Sensors and L298N Motor Driver
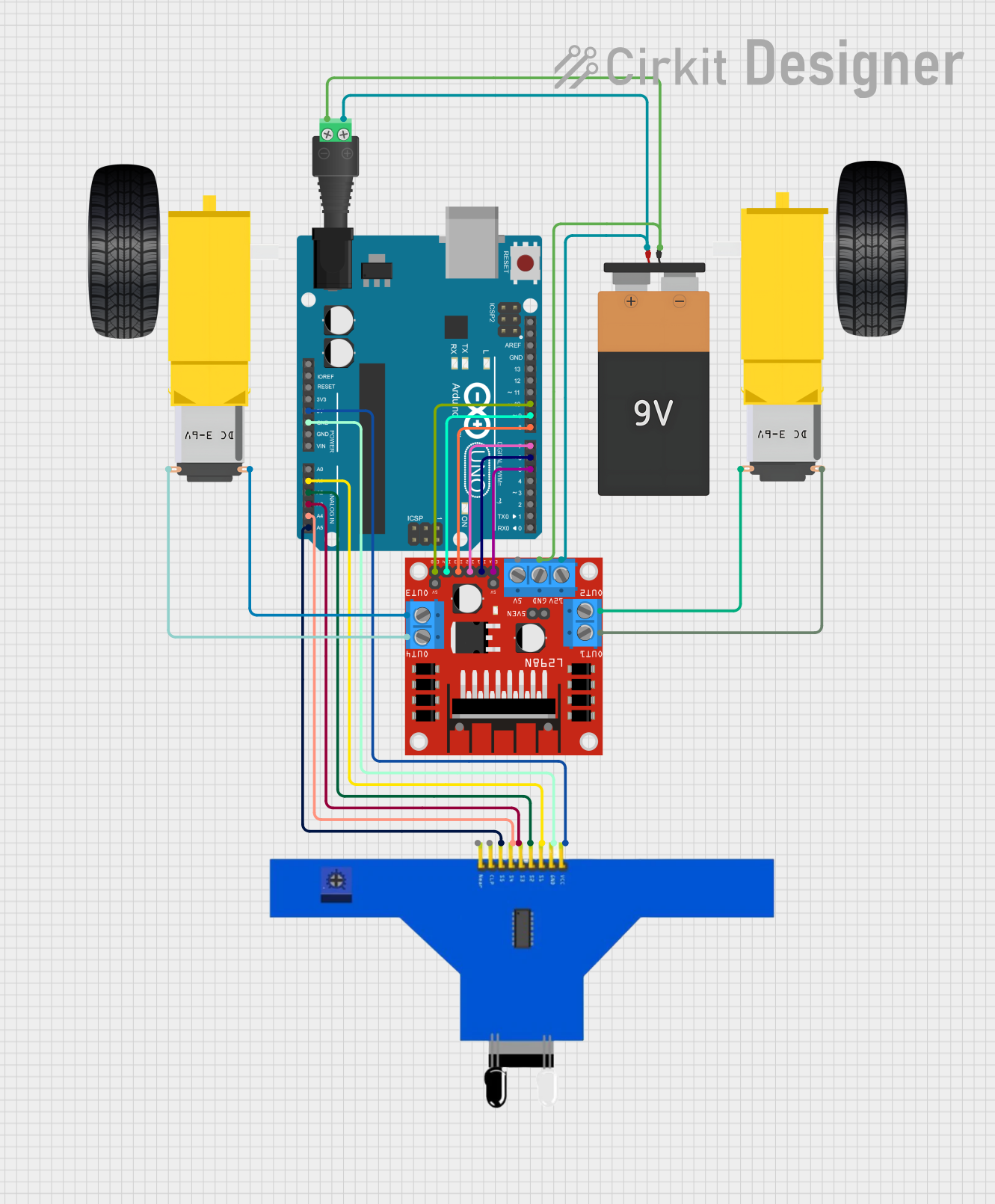
This circuit is designed to control a pair of DC gearmotors using an L298N motor driver module, which is interfaced with an Arduino UNO microcontroller. The Arduino is also connected to a 5-channel IR sensor for input, which may be used for line tracking or obstacle detection. Power is supplied by a 9V battery connected through a 2.1mm barrel jack, and the motor driver module regulates this power to drive the left and right gearmotors for a mobile robot platform.
ESP32-CAM Controlled Wi-Fi Robot Car
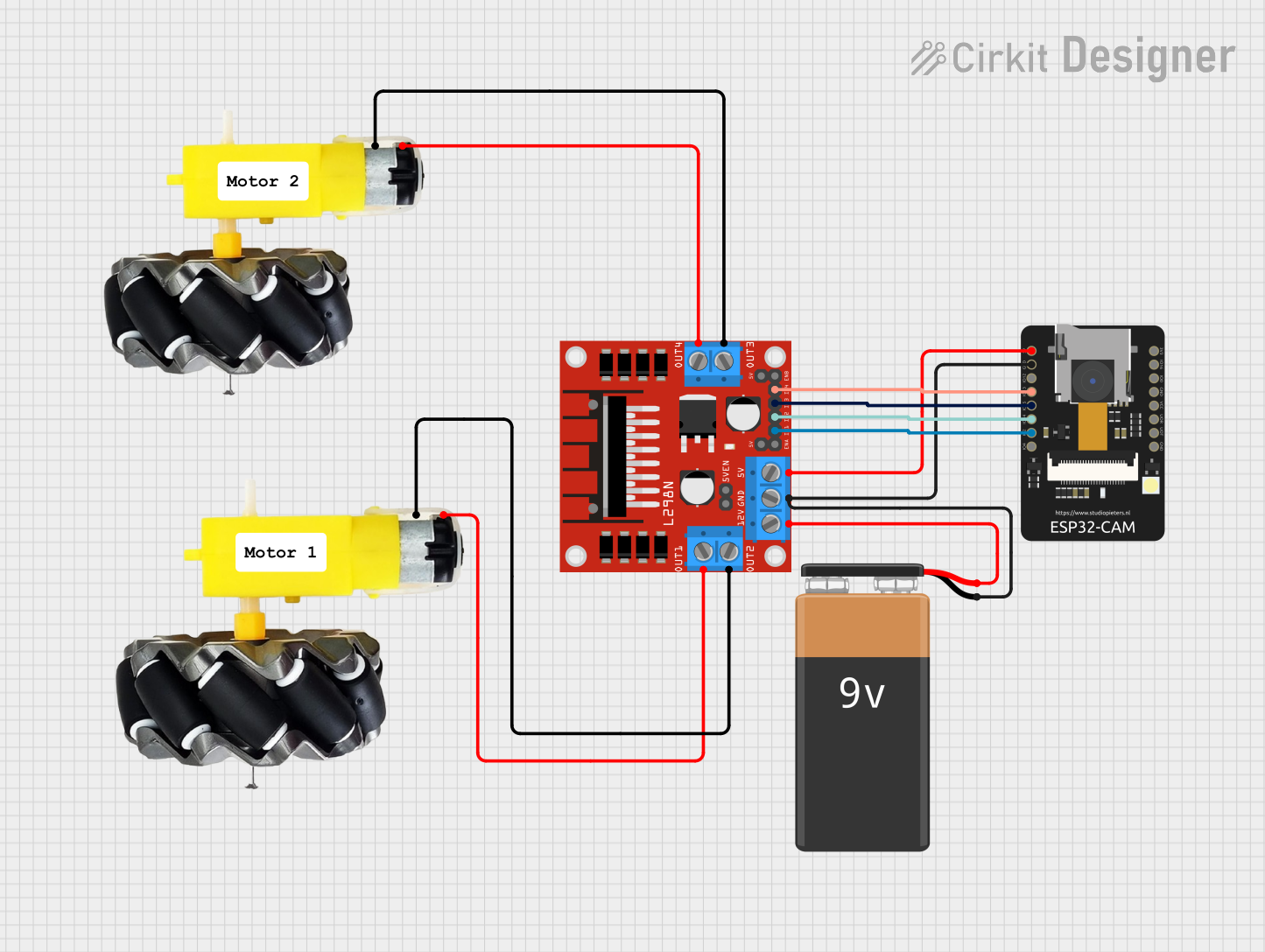
This circuit is designed to control a two-wheel motorized vehicle using an ESP32-CAM microcontroller. The ESP32-CAM is interfaced with an L298N DC motor driver to control the direction and speed of the motors attached to the wheels. Additionally, the ESP32-CAM is configured to capture images and provide WiFi connectivity for remote control via a web server with a user interface for driving commands.
ESP32 and L298N Motor Driver-Based Wi-Fi Controlled Robotic Vehicle with GPS and Metal Detection
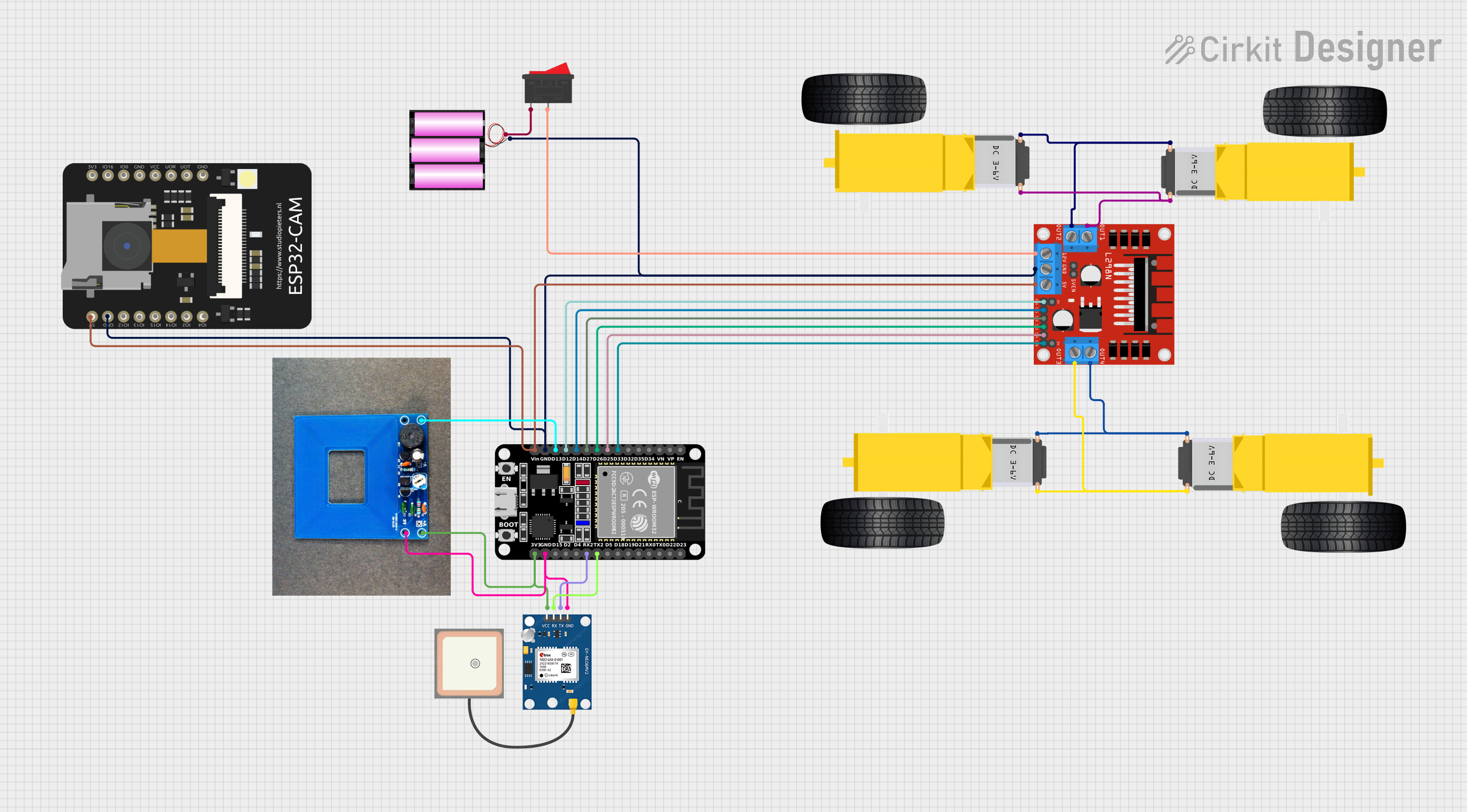
This circuit is a robotic vehicle control system that uses an ESP32 microcontroller to drive four DC gear motors via an L298N motor driver. It also includes a GPS module for location tracking, a metal detector for object detection, and an ESP32 CAM for capturing images or video, all powered by a 12V battery.
Explore Projects Built with motor and wheels
Battery-Powered Dual Gearmotor Drive System
This circuit consists of a 6V battery pack connected in parallel to two DC gearmotors, one for the left wheel and one for the right wheel of a vehicle. The battery provides power directly to both motors, enabling them to run simultaneously. As there is no control circuitry or microcontroller code provided, the motors will run continuously when the circuit is powered.
Arduino-Controlled Robotic Vehicle with IR Sensors and L298N Motor Driver
This circuit is designed to control a pair of DC gearmotors using an L298N motor driver module, which is interfaced with an Arduino UNO microcontroller. The Arduino is also connected to a 5-channel IR sensor for input, which may be used for line tracking or obstacle detection. Power is supplied by a 9V battery connected through a 2.1mm barrel jack, and the motor driver module regulates this power to drive the left and right gearmotors for a mobile robot platform.
ESP32-CAM Controlled Wi-Fi Robot Car
This circuit is designed to control a two-wheel motorized vehicle using an ESP32-CAM microcontroller. The ESP32-CAM is interfaced with an L298N DC motor driver to control the direction and speed of the motors attached to the wheels. Additionally, the ESP32-CAM is configured to capture images and provide WiFi connectivity for remote control via a web server with a user interface for driving commands.
ESP32 and L298N Motor Driver-Based Wi-Fi Controlled Robotic Vehicle with GPS and Metal Detection
This circuit is a robotic vehicle control system that uses an ESP32 microcontroller to drive four DC gear motors via an L298N motor driver. It also includes a GPS module for location tracking, a metal detector for object detection, and an ESP32 CAM for capturing images or video, all powered by a 12V battery.
Technical Specifications
Motor Specifications
| Parameter | Value |
|---|---|
| Motor Type | DC Motor / Stepper Motor |
| Operating Voltage | 3V - 12V (varies by model) |
| Current Rating | 100mA - 2A (depends on load) |
| Speed | 100 - 300 RPM (typical range) |
| Torque | 0.1 - 1.5 Nm (varies by model) |
Wheel Specifications
| Parameter | Value |
|---|---|
| Wheel Diameter | 65mm - 100mm (varies by model) |
| Material | Rubber / Plastic |
| Mounting Type | Direct fit / Coupled to motor |
Pin Configuration (for DC Motor)
| Pin Name | Description |
|---|---|
| V+ | Positive terminal for power |
| V- | Negative terminal for power |
Pin Configuration (for Stepper Motor)
| Pin Name | Description |
|---|---|
| A+ | Coil A positive terminal |
| A- | Coil A negative terminal |
| B+ | Coil B positive terminal |
| B- | Coil B negative terminal |
Usage Instructions
Connecting the Motor and Wheels:
- Attach the wheels securely to the motor shaft using the provided coupler or direct fit.
- Ensure the wheels are balanced and aligned to avoid wobbling during operation.
Powering the Motor:
- For DC motors, connect the V+ and V- pins to a power source (e.g., battery or motor driver).
- For stepper motors, use a motor driver (e.g., L298N or A4988) to control the coils.
Controlling the Motor with Arduino UNO:
- Use a motor driver (e.g., L298N) to interface the motor with the Arduino.
- Below is an example code snippet for controlling a DC motor using an Arduino UNO:
// Example code to control a DC motor with Arduino UNO and L298N driver
// Define motor control pins
const int ENA = 9; // Enable pin for motor speed control
const int IN1 = 8; // Input pin 1 for motor direction
const int IN2 = 7; // Input pin 2 for motor direction
void setup() {
// Set motor control pins as outputs
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
void loop() {
// Rotate motor forward
digitalWrite(IN1, HIGH); // Set IN1 high
digitalWrite(IN2, LOW); // Set IN2 low
analogWrite(ENA, 150); // Set speed (0-255)
delay(2000); // Run motor for 2 seconds
// Rotate motor backward
digitalWrite(IN1, LOW); // Set IN1 low
digitalWrite(IN2, HIGH); // Set IN2 high
analogWrite(ENA, 150); // Set speed (0-255)
delay(2000); // Run motor for 2 seconds
// Stop motor
digitalWrite(IN1, LOW); // Set IN1 low
digitalWrite(IN2, LOW); // Set IN2 low
analogWrite(ENA, 0); // Set speed to 0
delay(2000); // Wait for 2 seconds
}
- Important Considerations:
- Always use a motor driver to protect the Arduino from high current draw.
- Ensure the power supply matches the motor's voltage and current requirements.
- Avoid stalling the motor, as it can cause overheating or damage.
Troubleshooting and FAQs
Common Issues
Motor not spinning:
- Check the power supply and ensure it matches the motor's voltage and current requirements.
- Verify the connections between the motor, driver, and Arduino.
Motor spins in the wrong direction:
- Reverse the connections of the motor terminals (V+ and V- for DC motors).
- For stepper motors, swap the connections of one coil (e.g., A+ and A-).
Motor overheating:
- Ensure the motor is not overloaded or stalled.
- Use a heat sink or cooling fan if necessary.
Wheels wobbling or slipping:
- Check that the wheels are securely attached to the motor shaft.
- Use wheels with better grip or adjust the alignment.
FAQs
Can I use this motor and wheels with a Raspberry Pi?
- Yes, but you will need a motor driver to interface the motor with the Raspberry Pi's GPIO pins.
What is the maximum load the motor can handle?
- This depends on the motor's torque rating. Refer to the motor's datasheet for specific details.
Can I control the speed of the motor?
- Yes, for DC motors, use PWM (Pulse Width Modulation) to control speed. For stepper motors, adjust the step frequency.
Do I need a separate power supply for the motor?
- It is recommended to use a separate power supply for the motor to avoid overloading the Arduino or other control boards.