How to Use Caddx Ant FPV Camera 1200TVL Global WDR OSD Ultra Light Nano 16:9 for RC FPV: Examples, Pinouts, and Specs
Introduction
The Caddx Ant FPV Camera is a lightweight, high-performance camera designed for use in remote-controlled (RC) vehicles, such as drones and FPV (First Person View) racing quads. With its 1200TVL resolution, global wide dynamic range (WDR), and on-screen display (OSD) capabilities, this camera delivers exceptional image quality and real-time telemetry data, even in challenging lighting conditions. Its ultra-lightweight design makes it ideal for applications where weight is a critical factor.
Explore Projects Built with Caddx Ant FPV Camera 1200TVL Global WDR OSD Ultra Light Nano 16:9 for RC FPV

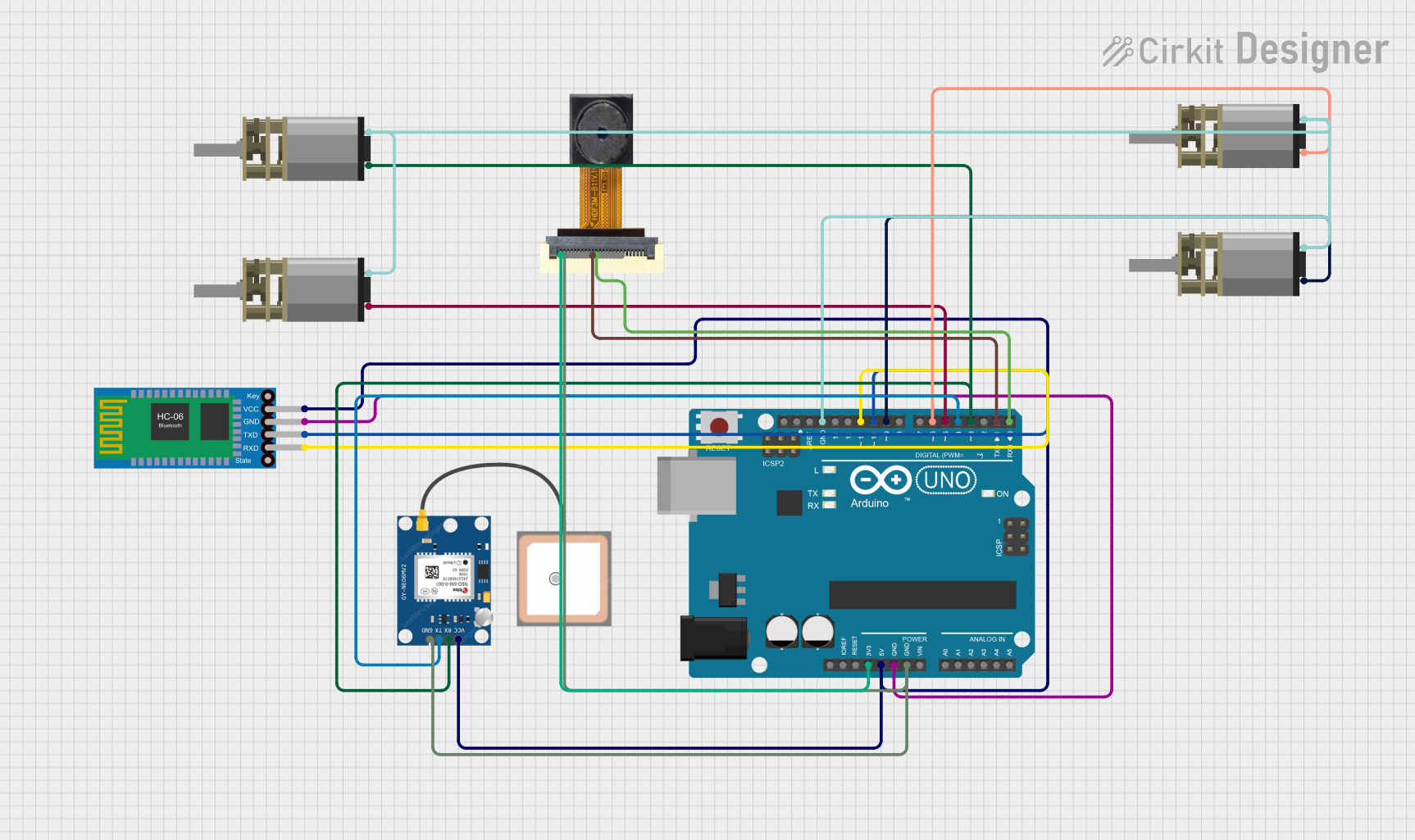

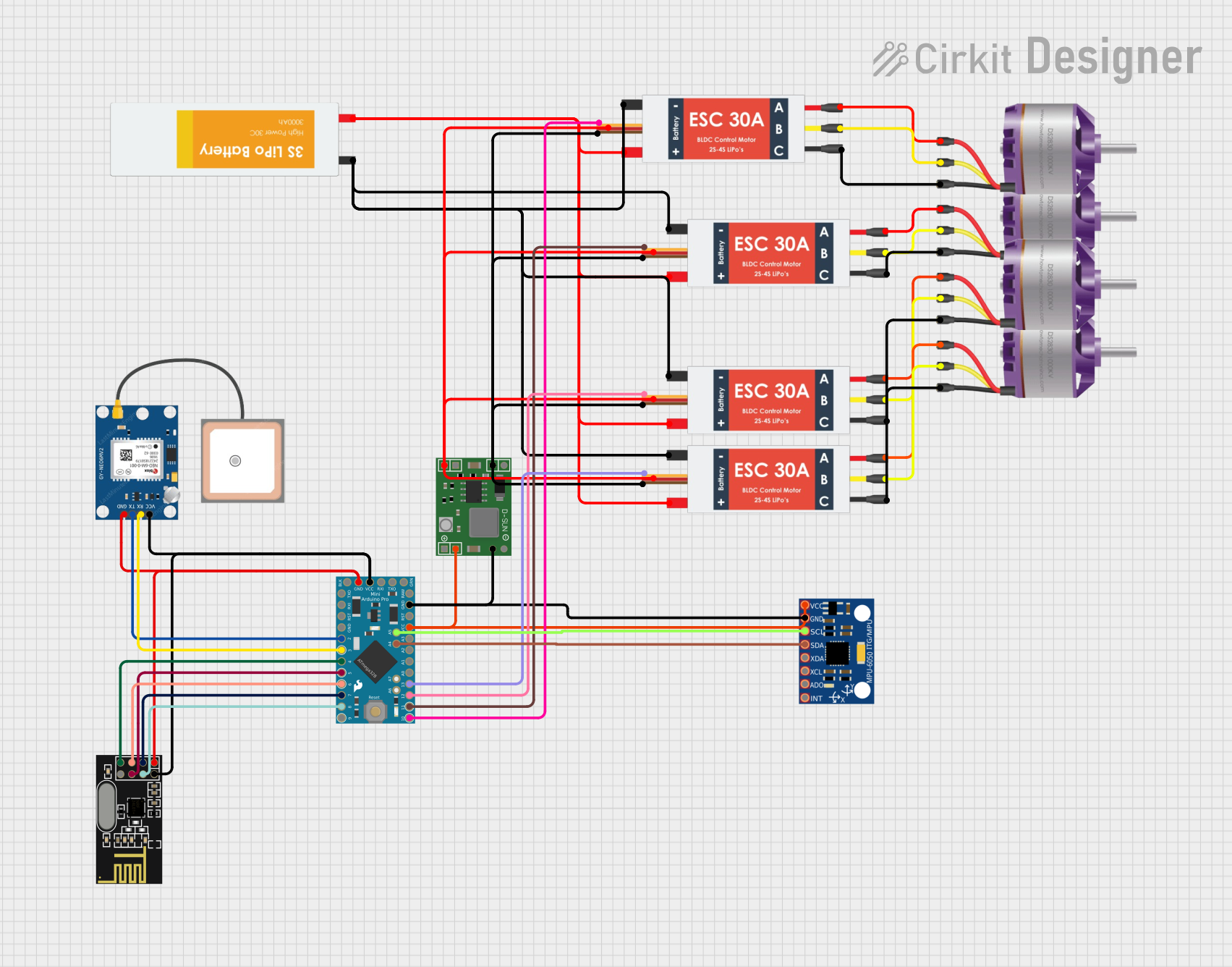
Explore Projects Built with Caddx Ant FPV Camera 1200TVL Global WDR OSD Ultra Light Nano 16:9 for RC FPV
Common Applications and Use Cases
- FPV racing drones for high-speed, low-latency video feeds.
- RC vehicles requiring real-time video transmission.
- Aerial photography and videography in dynamic lighting environments.
- Hobbyist and professional FPV setups for immersive experiences.
Technical Specifications
Below are the key technical details of the Caddx Ant FPV Camera:
| Specification | Details |
|---|---|
| Resolution | 1200TVL |
| Aspect Ratio | 16:9 |
| Lens | 2.1mm |
| Field of View (FOV) | 165° |
| Image Sensor | 1/3" CMOS |
| Wide Dynamic Range (WDR) | Global WDR |
| Signal System | PAL/NTSC (switchable) |
| Input Voltage | 3.7V - 18V |
| Power Consumption | ≤200mA @ 5V |
| Dimensions | 14mm x 14mm x 16mm |
| Weight | 2g |
| On-Screen Display (OSD) | Supported |
| Operating Temperature | -20°C to 60°C |
Pin Configuration and Descriptions
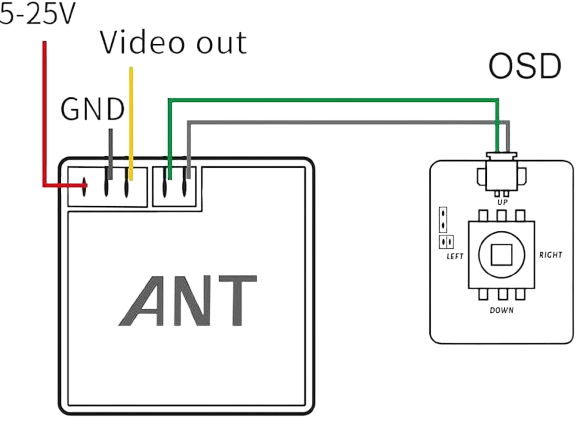
The Caddx Ant FPV Camera features a 4-pin connector for power, video, and control. Below is the pinout:
| Pin | Name | Description |
|---|---|---|
| 1 | GND | Ground connection for power and signal. |
| 2 | VCC | Power input (3.7V - 18V). |
| 3 | VIDEO | Analog video output for FPV transmission. |
| 4 | OSD/Control | UART connection for OSD configuration and control. |
Usage Instructions
How to Use the Component in a Circuit
- Power Connection: Connect the VCC pin to a power source within the range of 3.7V to 18V. Ensure the GND pin is connected to the ground of the power source.
- Video Output: Connect the VIDEO pin to the video input of your FPV transmitter or display device.
- OSD Configuration: Use the OSD/Control pin to configure the on-screen display settings via a UART interface. This allows you to customize telemetry data displayed on the screen.
Important Considerations and Best Practices
- Voltage Range: Ensure the input voltage is within the specified range (3.7V - 18V) to avoid damaging the camera.
- Mounting: Use a secure mounting solution to prevent vibrations from affecting image quality.
- Lighting Conditions: Take advantage of the global WDR feature to maintain image clarity in environments with high contrast lighting.
- OSD Configuration: Use the provided UART interface to adjust OSD settings, such as enabling or disabling telemetry data.
Example: Connecting to an Arduino UNO
The Caddx Ant FPV Camera can be connected to an Arduino UNO for basic UART-based OSD configuration. Below is an example code snippet:
#include <SoftwareSerial.h>
// Define RX and TX pins for UART communication
#define RX_PIN 10
#define TX_PIN 11
// Initialize SoftwareSerial for communication with the camera
SoftwareSerial cameraSerial(RX_PIN, TX_PIN);
void setup() {
// Start serial communication with the camera
cameraSerial.begin(9600); // Default baud rate for the camera
Serial.begin(9600); // Serial monitor for debugging
// Send a sample command to the camera (e.g., change OSD settings)
cameraSerial.println("OSD:ENABLE"); // Enable OSD telemetry display
Serial.println("Sent command to enable OSD.");
}
void loop() {
// Check for incoming data from the camera
if (cameraSerial.available()) {
String response = cameraSerial.readString();
Serial.println("Camera Response: " + response);
}
}
Note: Refer to the camera's user manual for specific UART commands and baud rate settings.
Troubleshooting and FAQs
Common Issues and Solutions
No Video Output:
- Cause: Incorrect wiring or power supply issues.
- Solution: Verify the connections to the VCC, GND, and VIDEO pins. Ensure the power supply voltage is within the specified range.
Blurry or Distorted Image:
- Cause: Improper focus or lens contamination.
- Solution: Adjust the lens focus and clean the lens with a microfiber cloth.
OSD Not Displaying:
- Cause: OSD is disabled or UART connection is incorrect.
- Solution: Check the UART connection and send the appropriate command to enable OSD.
Overheating:
- Cause: Prolonged use in high-temperature environments.
- Solution: Ensure proper ventilation and avoid operating the camera beyond its temperature range (-20°C to 60°C).
FAQs
Q: Can I use this camera with a 2S or 4S LiPo battery?
- A: Yes, the camera supports input voltages from 3.7V to 18V, making it compatible with 2S (7.4V) and 4S (14.8V) LiPo batteries.
Q: How do I switch between PAL and NTSC modes?
- A: Use the OSD/Control pin to send the appropriate UART command to toggle between PAL and NTSC modes.
Q: Is the camera waterproof?
- A: No, the camera is not waterproof. Avoid exposing it to water or moisture.
Q: Can I use this camera for night vision?
- A: The camera does not have infrared (IR) capabilities, so it is not suitable for complete darkness. However, it performs well in low-light conditions due to its WDR feature.