How to Use MB7344 HRXL-MaxSonar-WRST4: Examples, Pinouts, and Specs
Introduction
The MB7344 HRXL-MaxSonar-WRST4 is an ultrasonic distance sensor manufactured by MaxBotix. It is designed for precise and reliable distance measurement in a wide range of applications. With a detection range of 0.15 meters to 6.45 meters, the sensor is suitable for both short-range and long-range measurements. The MB7344 provides multiple output formats, including analog voltage, pulse width, and serial data, making it highly versatile for integration into various systems.
Explore Projects Built with MB7344 HRXL-MaxSonar-WRST4
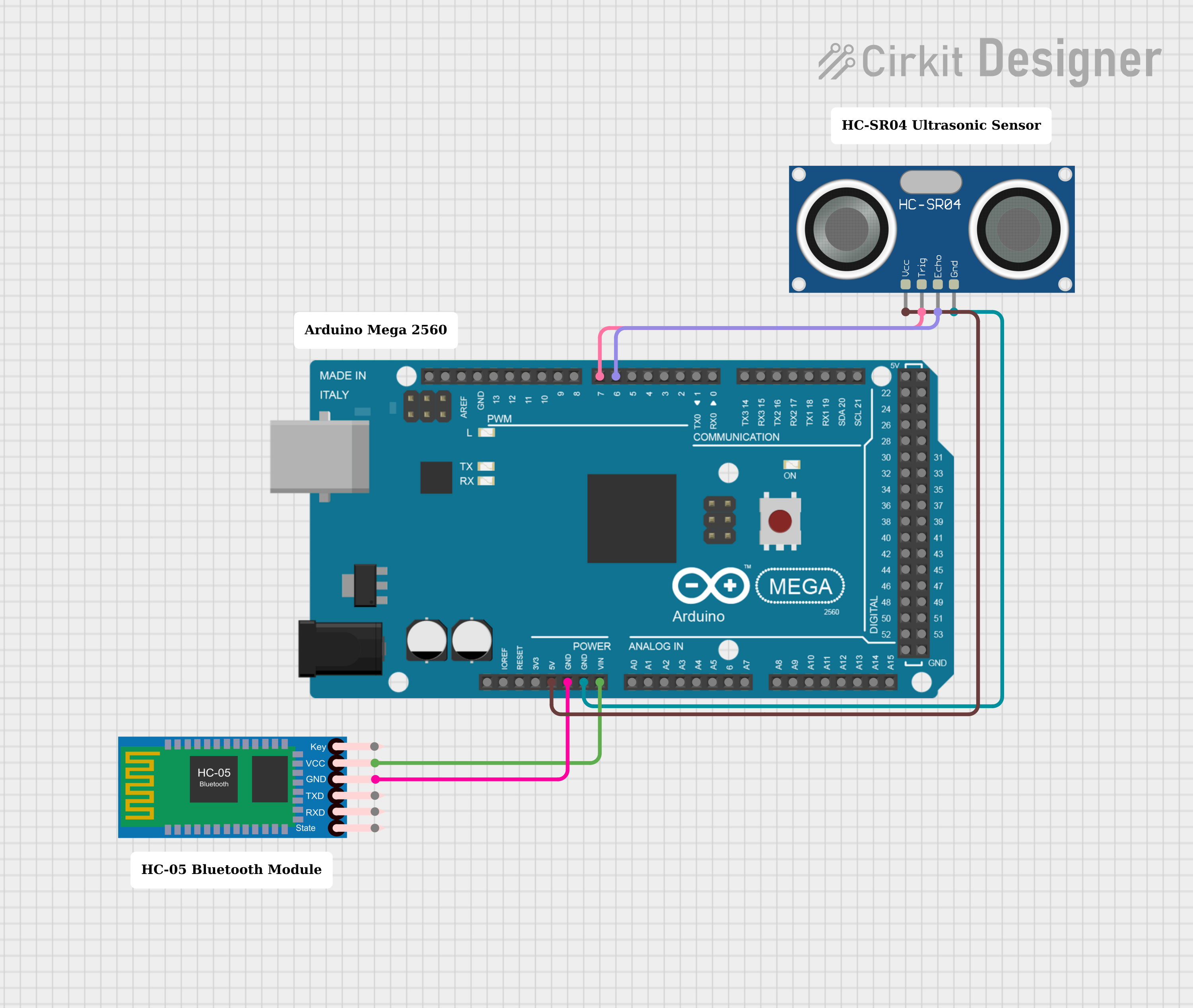
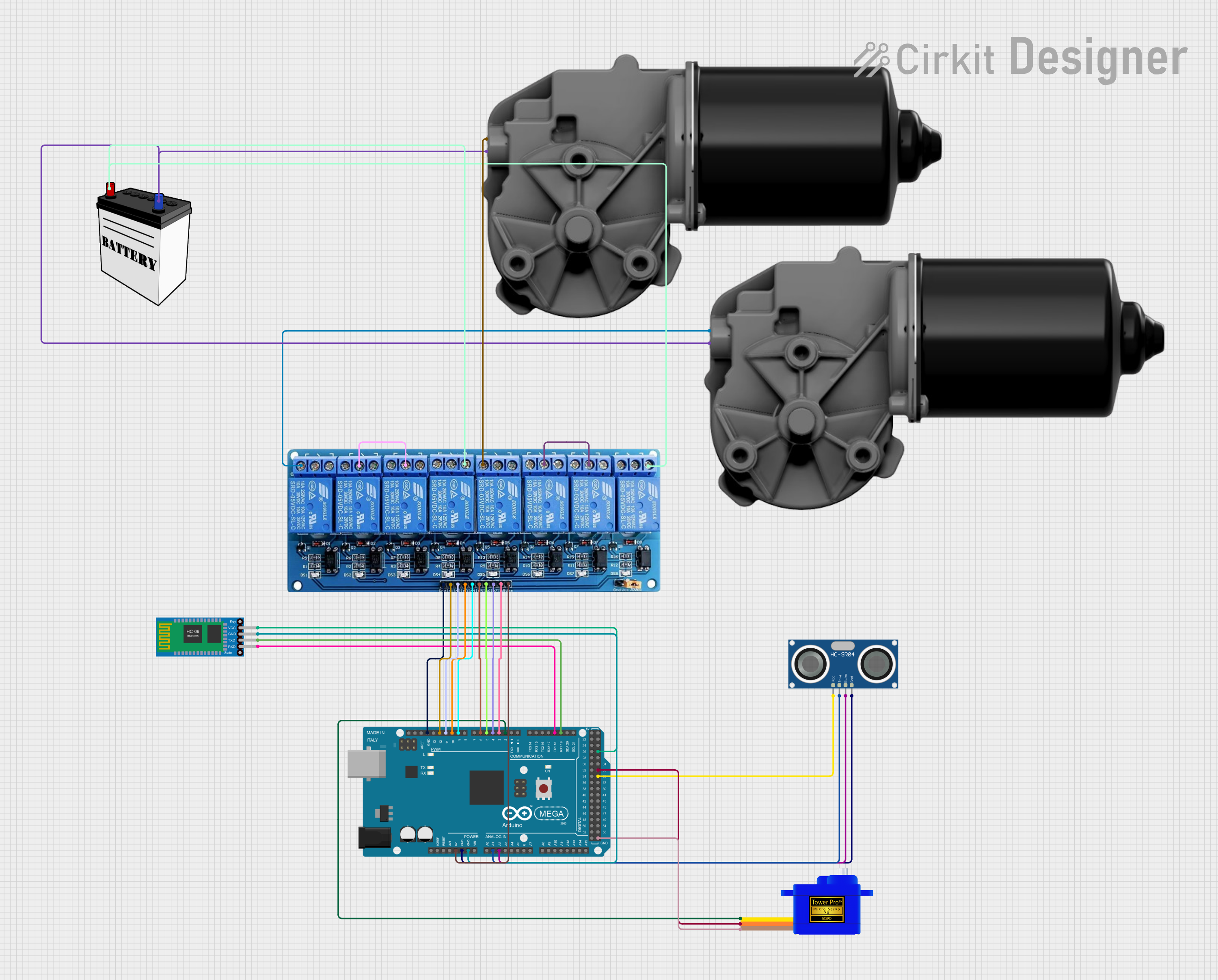
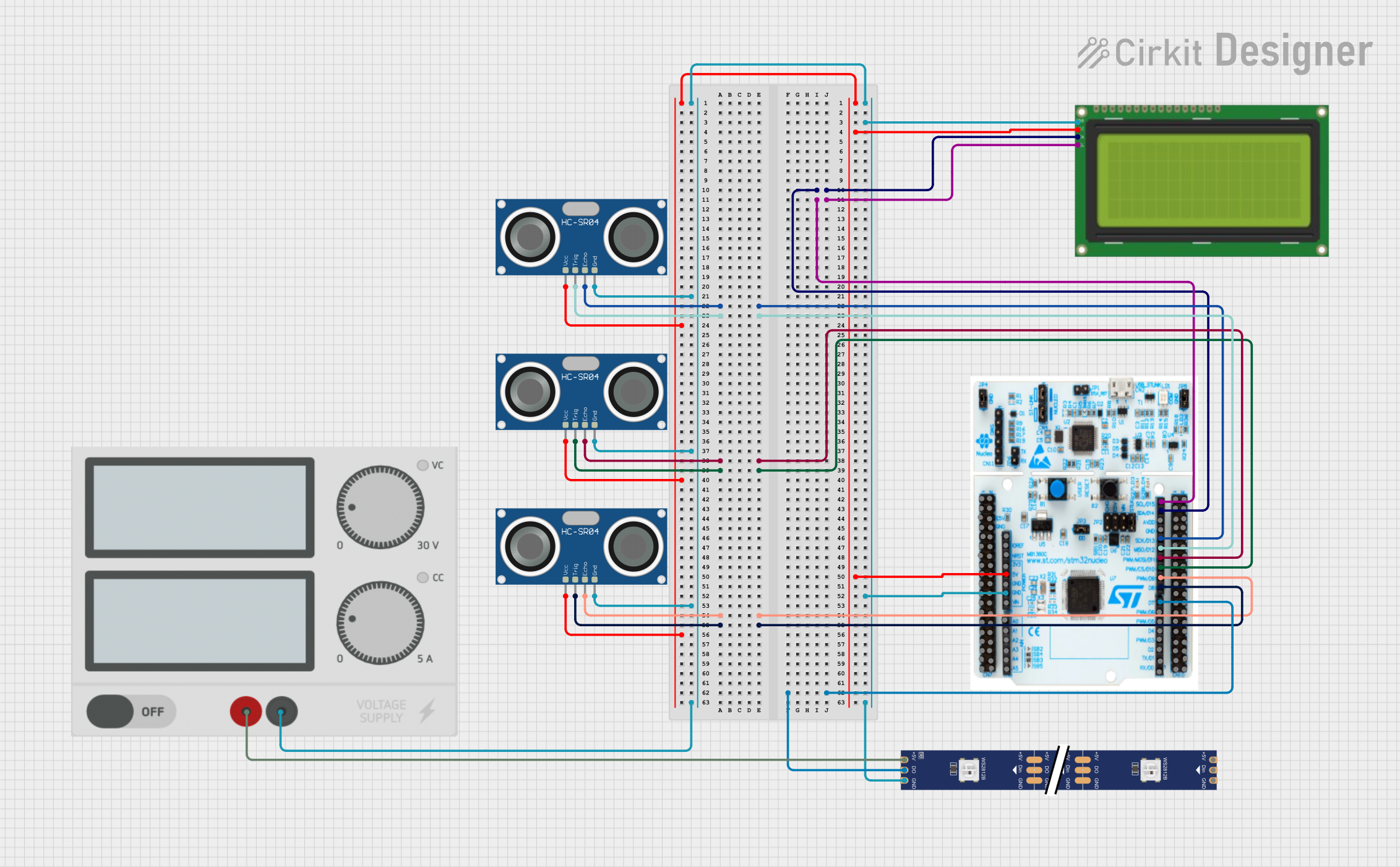
Explore Projects Built with MB7344 HRXL-MaxSonar-WRST4
Common Applications
- Robotics and automation
- Obstacle detection and avoidance
- Level measurement in tanks or containers
- Security and surveillance systems
- Proximity sensing in industrial environments
Technical Specifications
The following table outlines the key technical details of the MB7344 HRXL-MaxSonar-WRST4:
| Parameter | Value |
|---|---|
| Operating Voltage | 2.7V to 5.5V |
| Current Consumption | 3.4mA (typical) |
| Operating Temperature Range | -40°C to +65°C |
| Detection Range | 0.15m to 6.45m |
| Resolution | 1mm |
| Output Formats | Analog voltage, pulse width, serial |
| Beam Angle | ~5° (narrow beam) |
| Weight | 4.3 grams |
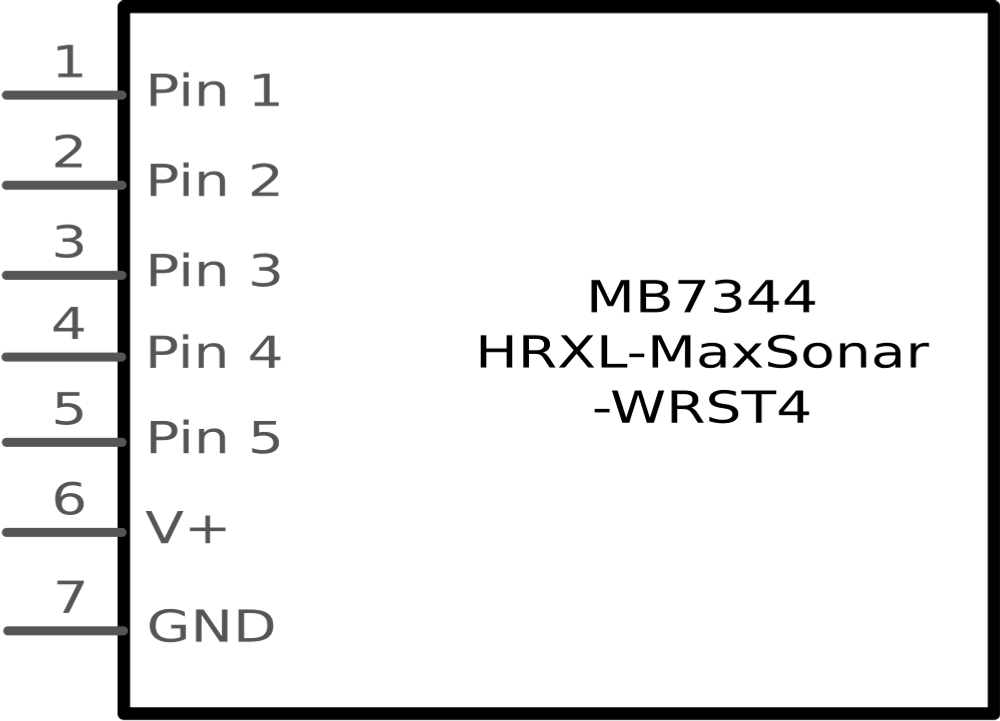
Pin Configuration and Descriptions
The MB7344 sensor has a 3-pin interface. The pin configuration is as follows:
| Pin | Name | Description |
|---|---|---|
| 1 | V+ | Power supply input (2.7V to 5.5V). Connect to a regulated power source. |
| 2 | GND | Ground. Connect to the ground of the power supply and circuit. |
| 3 | Signal | Output pin. Provides analog voltage, pulse width, or serial data based on configuration. |
Usage Instructions
How to Use the MB7344 in a Circuit
- Power Supply: Connect the V+ pin to a regulated power source (2.7V to 5.5V) and the GND pin to the ground of the circuit.
- Output Signal: Connect the Signal pin to the input of your microcontroller or data acquisition system. The output format (analog, pulse width, or serial) can be selected based on your application.
- Mounting: Ensure the sensor is mounted securely and aligned with the target for accurate distance measurement. Avoid obstructions in the sensor's beam path.
Important Considerations
- Power Supply Stability: Use a stable and noise-free power supply to ensure accurate measurements.
- Environmental Factors: The sensor's performance may vary in extreme temperatures or in environments with high levels of acoustic noise.
- Beam Angle: The narrow beam angle (~5°) allows for precise targeting but requires careful alignment with the target.
Example: Using MB7344 with Arduino UNO
The following example demonstrates how to use the MB7344 with an Arduino UNO to read distance measurements via the analog output.
// Example code for MB7344 HRXL-MaxSonar-WRST4 with Arduino UNO
// This code reads the analog voltage output from the sensor and calculates distance.
const int sensorPin = A0; // Connect the Signal pin of MB7344 to Arduino A0
const float scaleFactor = 0.0098; // Scale factor for converting voltage to distance (in meters)
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
pinMode(sensorPin, INPUT); // Set the sensor pin as input
}
void loop() {
int sensorValue = analogRead(sensorPin); // Read the analog value from the sensor
float voltage = sensorValue * (5.0 / 1023.0); // Convert ADC value to voltage
float distance = voltage / scaleFactor; // Calculate distance in meters
// Print the distance to the Serial Monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" meters");
delay(500); // Wait for 500ms before the next reading
}
Notes:
- The
scaleFactorvalue (0.0098) is specific to the MB7344 and converts the analog voltage to distance in meters. - Ensure the Arduino is powered by a stable 5V source when using the sensor.
Troubleshooting and FAQs
Common Issues and Solutions
No Output Signal
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Verify the connections and ensure the power supply voltage is within the specified range (2.7V to 5.5V).
Inaccurate Distance Measurements
- Cause: Misalignment of the sensor or environmental interference.
- Solution: Align the sensor properly with the target and ensure there are no obstructions in the beam path.
Fluctuating Readings
- Cause: Electrical noise or unstable power supply.
- Solution: Use a decoupling capacitor (e.g., 10µF) across the power supply pins to reduce noise.
Sensor Not Detecting Objects
- Cause: Target is outside the detection range or has poor acoustic reflectivity.
- Solution: Ensure the target is within the 0.15m to 6.45m range and has a surface that reflects sound waves effectively.
FAQs
Q: Can the MB7344 detect transparent objects?
A: Ultrasonic sensors may struggle with transparent objects like glass due to poor sound wave reflection. Use a reflective surface for better detection.Q: What is the maximum update rate of the sensor?
A: The MB7344 has a maximum update rate of 10Hz (10 readings per second).Q: Can I use the sensor outdoors?
A: Yes, the MB7344 is designed to operate in outdoor environments, but performance may vary in extreme weather conditions.Q: How do I switch between output formats?
A: The MB7344 automatically provides all three output formats (analog, pulse width, and serial). Use the format that best suits your application.