How to Use Servo: Examples, Pinouts, and Specs
Introduction
A servo is a rotary actuator that allows for precise control of angular position, velocity, and acceleration. It consists of a motor coupled to a sensor for position feedback, along with a control circuit. Servos are widely used in robotics, automation, remote-controlled vehicles, and industrial machinery due to their ability to provide accurate and repeatable motion.
Explore Projects Built with Servo
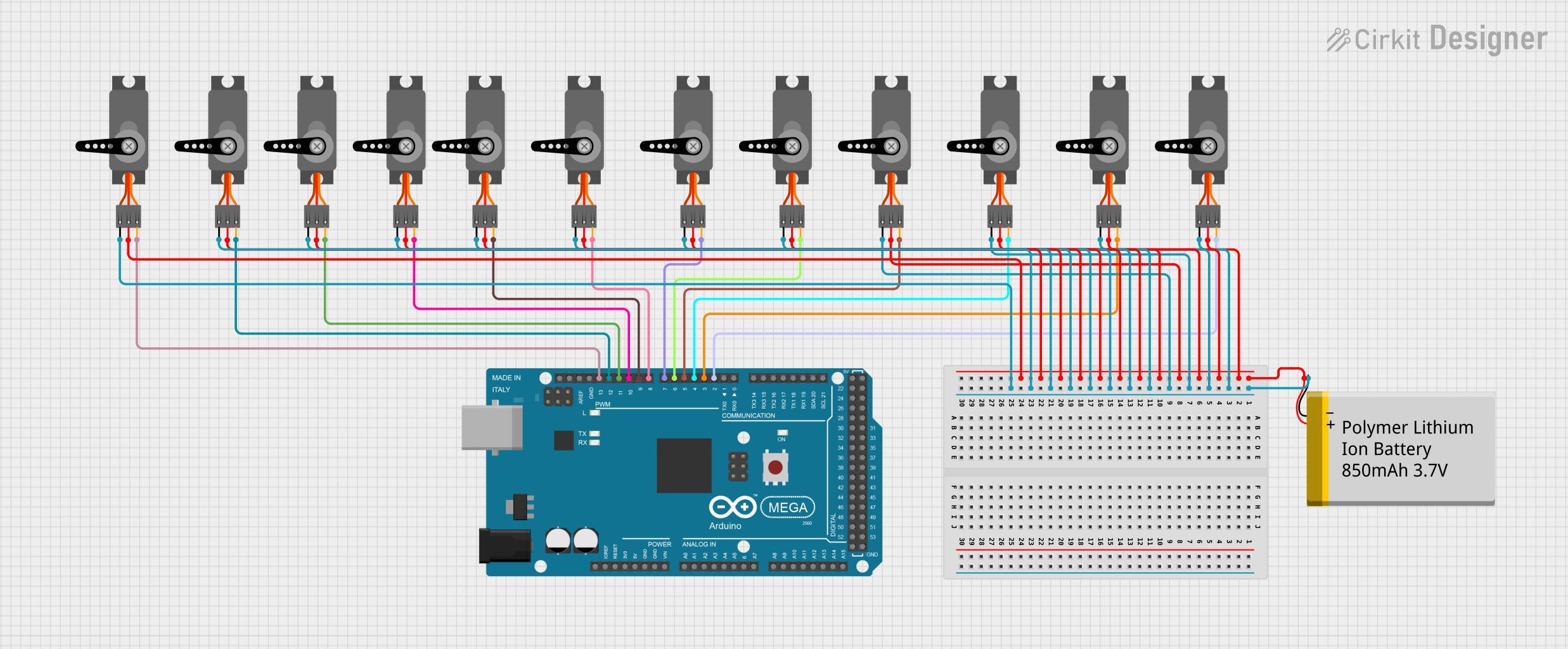
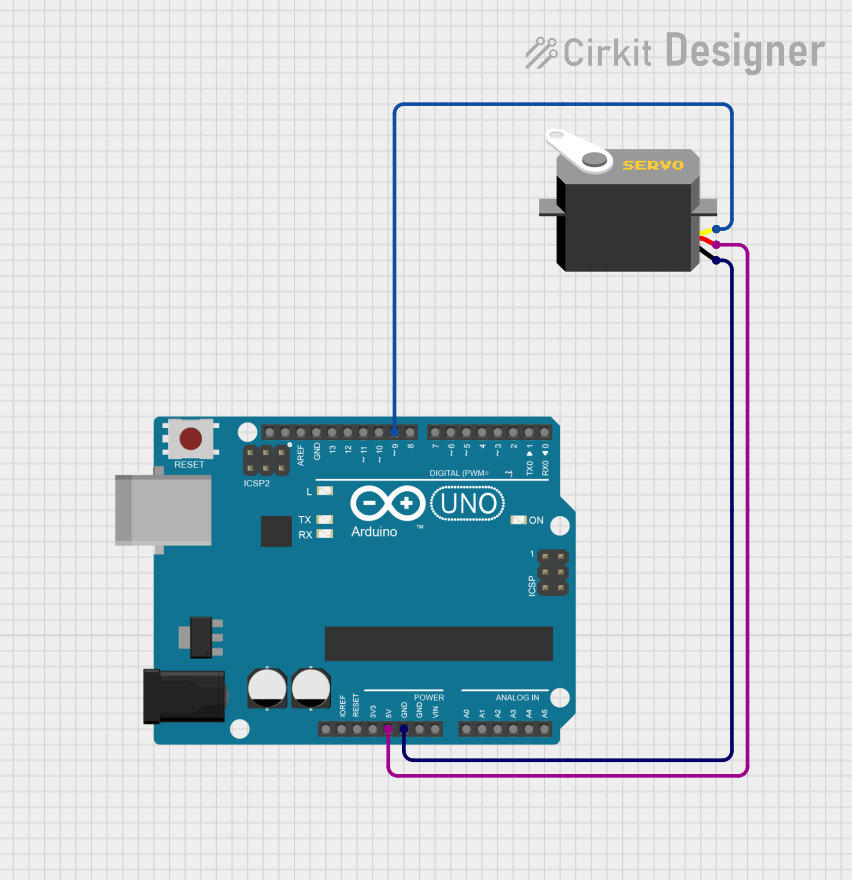
Explore Projects Built with Servo
Common Applications and Use Cases
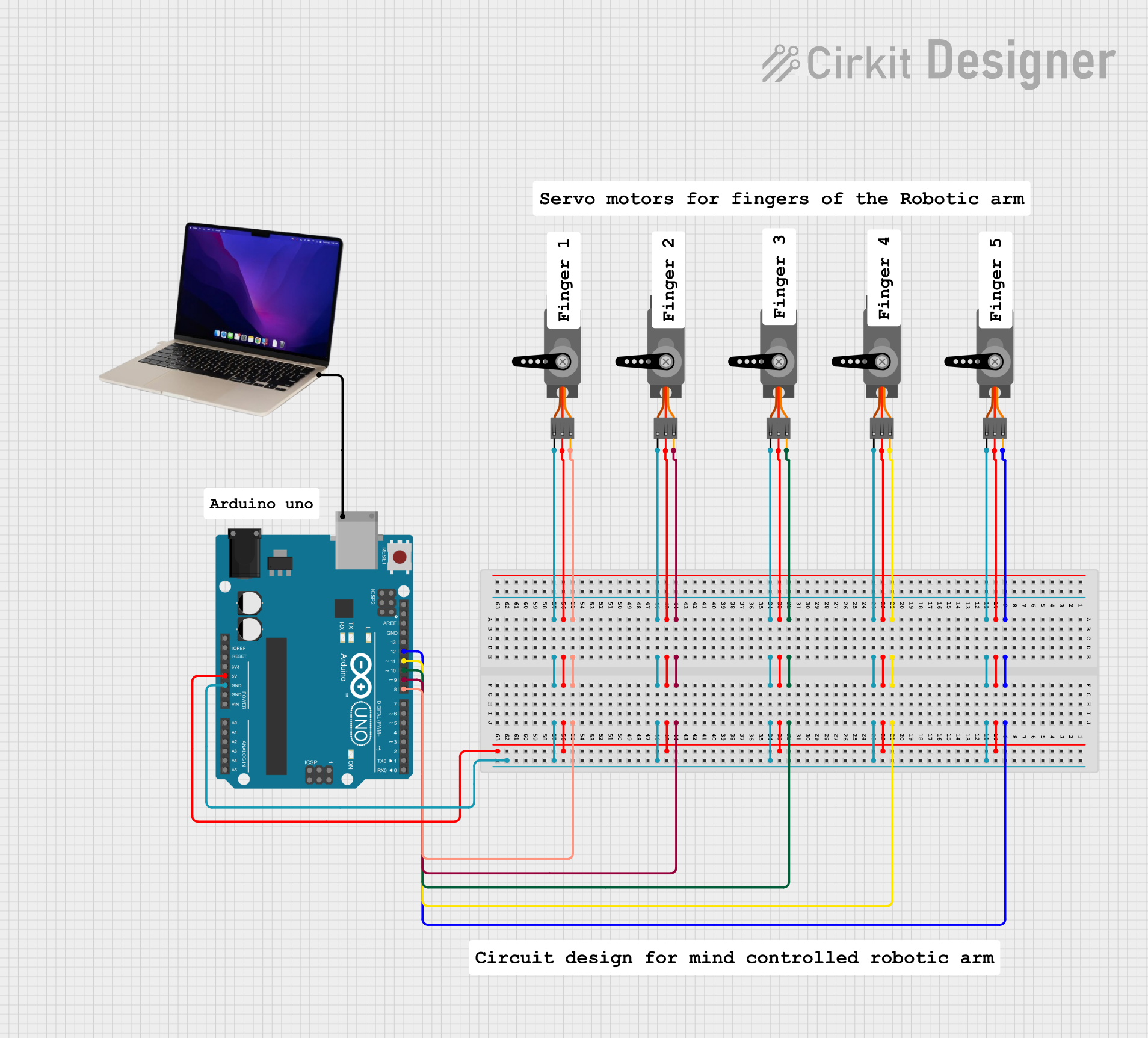
- Robotics: Controlling robotic arms, grippers, and joints.
- RC Vehicles: Steering and throttle control in remote-controlled cars, boats, and planes.
- Automation: Positioning systems in conveyor belts and manufacturing equipment.
- DIY Projects: Automated doors, camera gimbals, and hobbyist creations.
- Prosthetics: Actuating artificial limbs for precise movement.
Technical Specifications
Below are the general technical specifications for a standard hobby servo. Note that specifications may vary depending on the specific model and manufacturer.
Key Technical Details
- Operating Voltage: 4.8V to 6V (typical range)
- Current Draw: 10mA to 1A (depending on load)
- Torque: 1.5 kg-cm to 25 kg-cm (varies by model)
- Rotation Range: 0° to 180° (standard), 360° for continuous rotation servos
- Control Signal: Pulse Width Modulation (PWM)
- Pulse width: 1ms (0°), 1.5ms (90°), 2ms (180°)
- Frequency: 50Hz (20ms period)
- Connector: 3-pin (Signal, VCC, GND)
Pin Configuration and Descriptions
The servo typically has a 3-pin connector with the following pinout:
| Pin Number | Name | Description |
|---|---|---|
| 1 | Signal | Receives the PWM control signal |
| 2 | VCC | Power supply (4.8V to 6V) |
| 3 | GND | Ground connection |
Usage Instructions
How to Use the Servo in a Circuit
Connect the Servo:
- Connect the Signal pin to a PWM-capable pin on your microcontroller (e.g., Arduino).
- Connect the VCC pin to a 5V power source.
- Connect the GND pin to the ground of your circuit.
Generate PWM Signal:
- Use a microcontroller to generate a PWM signal with a frequency of 50Hz.
- Adjust the pulse width to control the servo's position:
- 1ms pulse: 0° position
- 1.5ms pulse: 90° position
- 2ms pulse: 180° position
Power Considerations:
- If the servo draws high current, use an external power supply instead of powering it directly from the microcontroller.
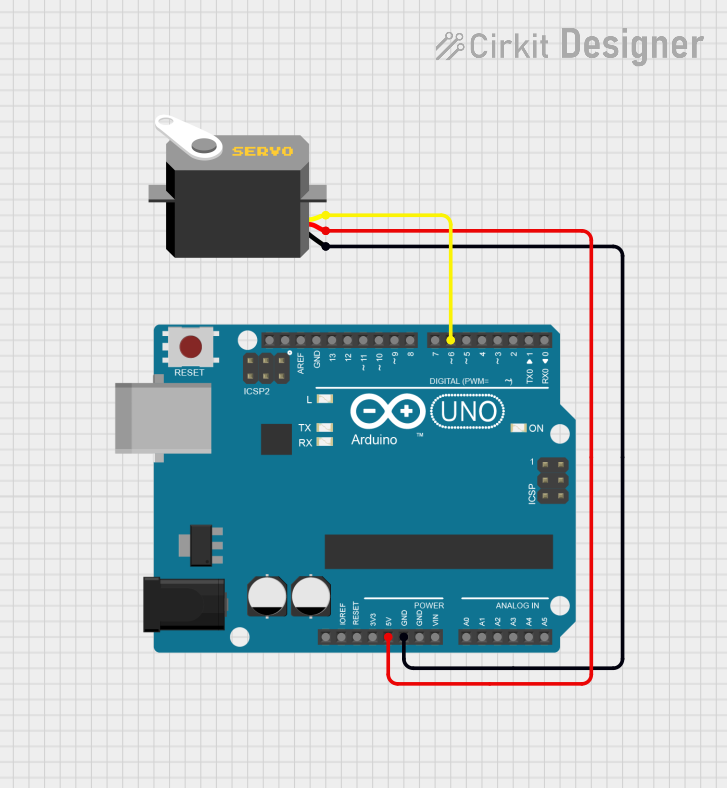
Arduino Example Code
Below is an example of how to control a servo using an Arduino UNO:
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a Servo object
void setup() {
myServo.attach(9); // Attach the servo to pin 9
}
void loop() {
myServo.write(0); // Move servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180); // Move servo to 180 degrees
delay(1000); // Wait for 1 second
}
Important Considerations and Best Practices
- Avoid Overloading: Do not exceed the torque rating of the servo to prevent damage.
- Use Proper Power Supply: Ensure the power supply can handle the servo's current draw, especially under load.
- Secure Mounting: Mount the servo securely to avoid vibrations or misalignment.
- Calibrate the Servo: If the servo does not reach the desired position, adjust the pulse width or use a calibration routine.
Troubleshooting and FAQs
Common Issues and Solutions
Servo Not Moving:
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check the connections and ensure the power supply meets the servo's requirements.
Servo Jittering:
- Cause: Electrical noise or unstable power supply.
- Solution: Add a capacitor (e.g., 100µF) across the power supply to stabilize it.
Servo Overheating:
- Cause: Prolonged operation under high load.
- Solution: Reduce the load or use a servo with a higher torque rating.
Servo Not Reaching Full Range:
- Cause: Incorrect PWM signal or mechanical obstruction.
- Solution: Verify the PWM signal timing and check for physical obstructions.
FAQs
Q: Can I control multiple servos with one microcontroller?
- A: Yes, most microcontrollers can control multiple servos using separate PWM pins or a servo driver module.
Q: What is the difference between a standard and a continuous rotation servo?
- A: A standard servo has a limited rotation range (e.g., 0° to 180°), while a continuous rotation servo can rotate 360° and is controlled by speed and direction rather than position.
Q: Can I power the servo directly from the Arduino?
- A: It is not recommended for high-torque servos, as they may draw more current than the Arduino can supply. Use an external power source instead.
Q: How do I know if my servo is compatible with my project?
- A: Check the servo's voltage, torque, and size specifications to ensure they meet your project's requirements.