How to Use SpeedyBee F405: Examples, Pinouts, and Specs
Introduction
The SpeedyBee F405 is a high-performance flight controller designed specifically for drones. It features a powerful STM32F405 processor, multiple input/output ports, and support for a wide range of communication protocols. This component is ideal for drone enthusiasts and professionals seeking precise control, advanced flight features, and seamless integration with other drone components.
Explore Projects Built with SpeedyBee F405

Explore Projects Built with SpeedyBee F405
Common Applications and Use Cases
- Multirotor drones (quadcopters, hexacopters, etc.)
- FPV (First-Person View) racing drones
- Aerial photography and videography platforms
- Autonomous drone systems
- Educational and research projects involving UAVs (Unmanned Aerial Vehicles)
Technical Specifications
Key Technical Details
- Processor: STM32F405 (32-bit ARM Cortex-M4 with FPU)
- Input Voltage: 3.3V to 6V (via USB) or 7V to 42V (via battery input)
- IMU (Inertial Measurement Unit): MPU6000 (6-axis gyro and accelerometer)
- UART Ports: 5 UARTs for peripherals (e.g., GPS, telemetry, receivers)
- ESC Protocols: DShot, Oneshot, Multishot, and PWM
- OSD (On-Screen Display): Integrated Betaflight OSD
- Flash Memory: 16MB for blackbox logging
- BEC (Battery Elimination Circuit): 5V/2A output
- Dimensions: 36mm x 36mm (30.5mm x 30.5mm mounting holes)
- Weight: ~7g
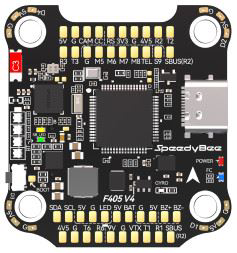
Pin Configuration and Descriptions
The SpeedyBee F405 features a variety of pins for connecting peripherals. Below is a table summarizing the key pin functions:
| Pin Name | Description |
|---|---|
| GND | Ground connection for power and signal reference |
| VBAT | Battery voltage input (7V to 42V) |
| 5V | 5V output for powering peripherals (up to 2A) |
| 3.3V | 3.3V output for low-power peripherals |
| UART1 (TX/RX) | UART port for connecting GPS, telemetry, or other serial devices |
| UART2 (TX/RX) | Additional UART port for peripherals |
| UART3 (TX/RX) | UART port commonly used for receiver connections |
| SCL/SDA | I2C interface for external sensors (e.g., barometer, magnetometer) |
| M1-M4 | Motor outputs for ESCs (Electronic Speed Controllers) |
| LED_STRIP | Output for programmable RGB LED strips (e.g., WS2812) |
| Buzzer | Connection for an active buzzer (used for alerts and notifications) |
| RSSI | Analog input for receiver signal strength indication |
| Current | Analog input for current sensor (used for monitoring power consumption) |
| Boot | Bootloader mode pin for firmware flashing |
Usage Instructions
How to Use the SpeedyBee F405 in a Circuit
Powering the Flight Controller:
- Connect the VBAT pin to your drone's battery (7V to 42V).
- Alternatively, power the board via the USB port for configuration or testing.
Connecting Motors and ESCs:
- Connect the signal wires from your ESCs to the M1-M4 pins.
- Ensure the ESCs are properly calibrated and configured for the desired protocol (e.g., DShot).
Connecting a Receiver:
- Use one of the UART ports (e.g., UART3) to connect your receiver.
- Configure the receiver type (e.g., SBUS, DSMX) in the Betaflight Configurator.
Adding Peripherals:
- Connect GPS modules, telemetry radios, or other devices to the available UART ports.
- Use the I2C interface for additional sensors if needed.
Configuring the Flight Controller:
- Install the Betaflight Configurator software on your computer.
- Connect the SpeedyBee F405 to your computer via USB.
- Use the configurator to set up your drone's parameters, including PID tuning, receiver mapping, and flight modes.
Mounting the Flight Controller:
- Secure the SpeedyBee F405 to your drone's frame using the 30.5mm x 30.5mm mounting holes.
- Use vibration-dampening materials to minimize interference with the IMU.
Important Considerations and Best Practices
- Always check the polarity of your connections to avoid damaging the flight controller.
- Use a high-quality power distribution board (PDB) or 4-in-1 ESC to simplify wiring.
- Ensure proper cooling and airflow around the flight controller to prevent overheating.
- Regularly update the firmware using the Betaflight Configurator to access new features and improvements.
Example Code for Arduino UNO Integration
While the SpeedyBee F405 is not typically used with an Arduino UNO, you can use an Arduino to send commands or telemetry data to the flight controller via a UART interface. Below is an example of how to send data to the SpeedyBee F405:
#include <SoftwareSerial.h>
// Define RX and TX pins for SoftwareSerial
SoftwareSerial mySerial(10, 11); // RX, TX
void setup() {
// Start the hardware serial port for debugging
Serial.begin(9600);
// Start the software serial port for communication with SpeedyBee F405
mySerial.begin(115200);
Serial.println("Arduino to SpeedyBee F405 communication started.");
}
void loop() {
// Send a test message to the SpeedyBee F405
mySerial.println("Hello, SpeedyBee F405!");
// Check if the flight controller sends any data back
if (mySerial.available()) {
String response = mySerial.readString();
Serial.println("Received from SpeedyBee F405: " + response);
}
delay(1000); // Wait for 1 second before sending the next message
}
Troubleshooting and FAQs
Common Issues and Solutions
Flight Controller Not Powering On:
- Ensure the battery is properly connected to the VBAT pin.
- Check for loose or damaged wires.
- Verify that the USB cable is functional if powering via USB.
Motors Not Spinning:
- Confirm that the ESCs are properly connected to the M1-M4 pins.
- Check the motor protocol configuration in the Betaflight Configurator.
- Calibrate the ESCs if necessary.
No Communication with Betaflight Configurator:
- Ensure the correct USB drivers are installed on your computer.
- Try a different USB cable or port.
- Put the flight controller in bootloader mode by holding the Boot pin while connecting to USB.
Unstable Flight or Drifting:
- Verify that the flight controller is mounted securely and vibration is minimized.
- Perform an accelerometer and gyro calibration in the Betaflight Configurator.
- Check the PID tuning settings and adjust as needed.
FAQs
Can I use the SpeedyBee F405 with iNav firmware? Yes, the SpeedyBee F405 is compatible with iNav firmware for advanced navigation features.
What is the maximum supported battery voltage? The SpeedyBee F405 supports up to 42V, which is equivalent to a 10S LiPo battery.
Does the flight controller support GPS? Yes, the SpeedyBee F405 supports GPS modules via its UART ports.
How do I update the firmware? Use the Betaflight Configurator to flash the latest firmware. Put the flight controller in bootloader mode if required.
This concludes the documentation for the SpeedyBee F405. For further assistance, refer to the official SpeedyBee website or community forums.