How to Use Canbus Transceiver TJA1050: Examples, Pinouts, and Specs
Introduction
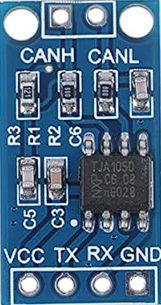
The TJA1050 is a high-speed CAN (Controller Area Network) transceiver designed to facilitate communication in automotive and industrial applications. It acts as an interface between the CAN protocol controller and the physical CAN bus, ensuring reliable data transmission. With support for data rates up to 1 Mbps, the TJA1050 is optimized for robust performance in noisy environments while maintaining low power consumption.
Explore Projects Built with Canbus Transceiver TJA1050
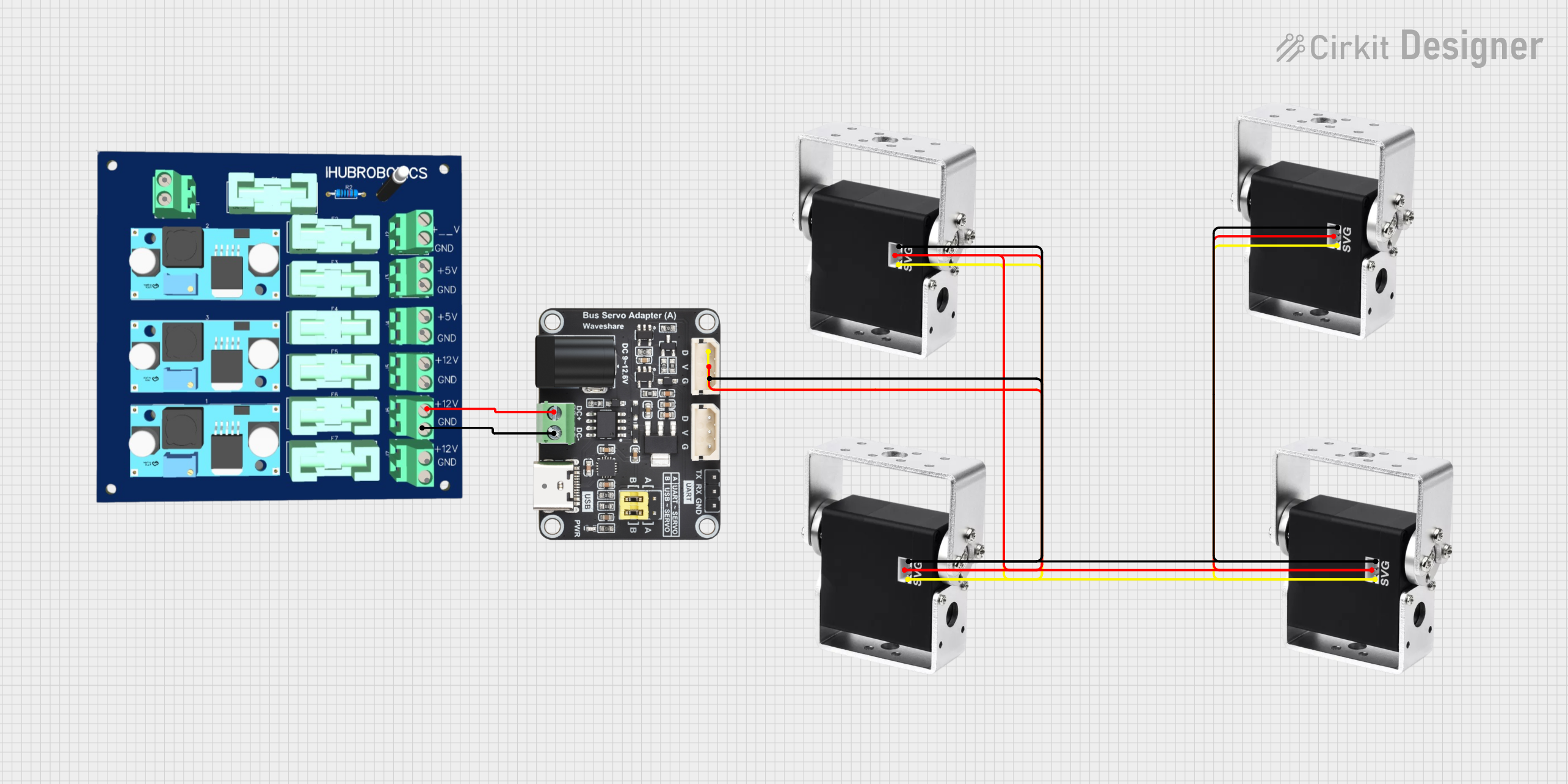

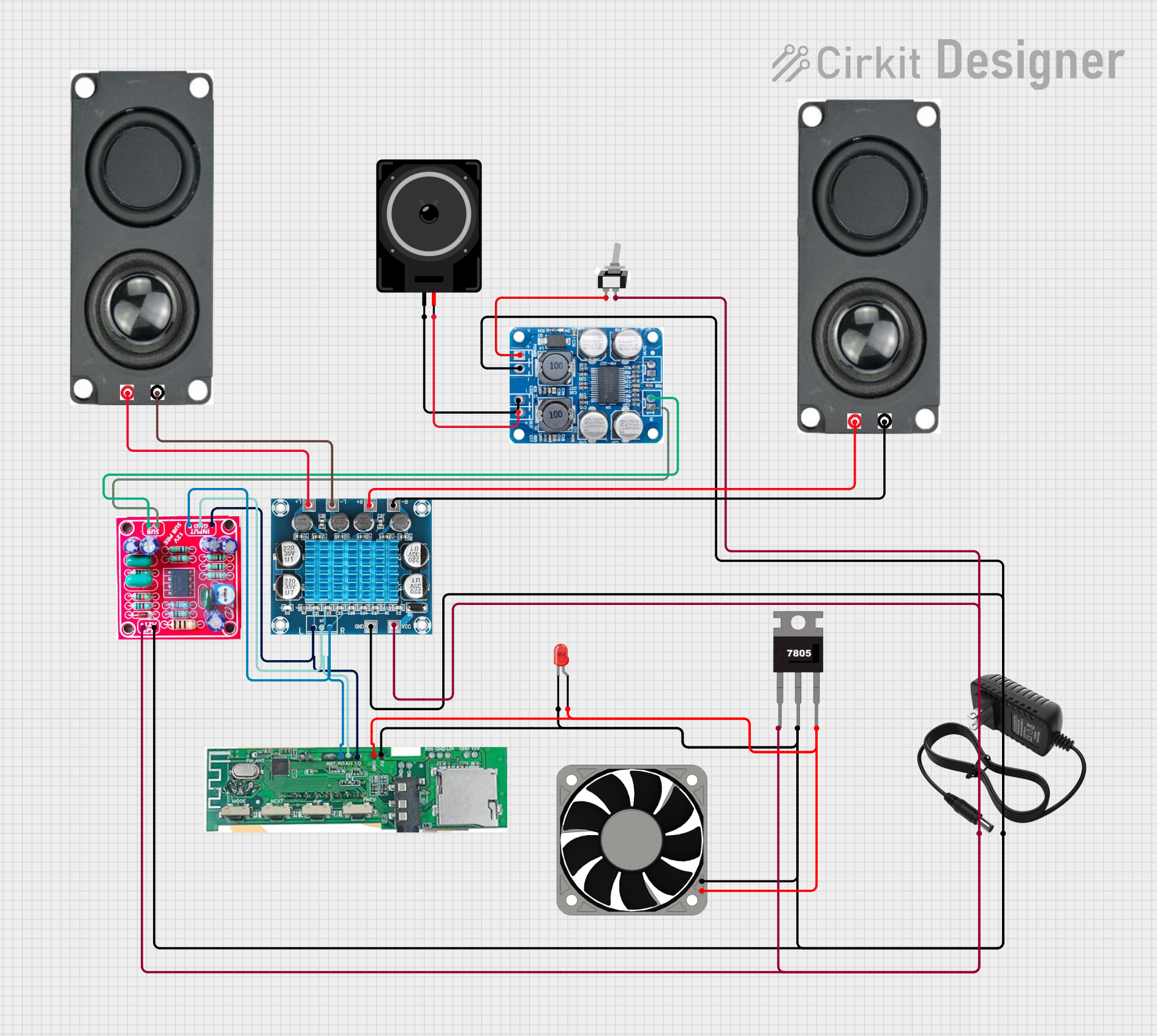
Explore Projects Built with Canbus Transceiver TJA1050
Common Applications and Use Cases
- Automotive systems (e.g., engine control units, body control modules)
- Industrial automation and control systems
- Robotics and embedded systems
- Communication networks in harsh environments
- Diagnostic tools for CAN-based systems
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Supply Voltage (Vcc) | 4.5 V to 5.5 V |
| Data Rate | Up to 1 Mbps |
| Operating Temperature | -40°C to +125°C |
| Bus Voltage Range | -27 V to +40 V |
| Standby Current | < 10 µA |
| ESD Protection | ±6 kV (Human Body Model) |
| Transmit Data Input Levels | Compatible with 3.3 V and 5 V logic |
Pin Configuration and Descriptions
The TJA1050 is typically available in an 8-pin SO8 or DIP8 package. Below is the pinout and description:
| Pin No. | Pin Name | Description |
|---|---|---|
| 1 | TXD | Transmit Data Input: Input from the CAN controller to send data on the bus. |
| 2 | GND | Ground: Connect to system ground. |
| 3 | Vcc | Supply Voltage: Connect to a 5 V power supply. |
| 4 | RXD | Receive Data Output: Output to the CAN controller for received data. |
| 5 | Vref | Reference Voltage: Provides a stabilized reference voltage (optional). |
| 6 | CANL | CAN Low: Connect to the CAN bus low line. |
| 7 | CANH | CAN High: Connect to the CAN bus high line. |
| 8 | Rs | Slope Control: Adjusts the slew rate for EMC optimization. |
Usage Instructions
How to Use the TJA1050 in a Circuit
- Power Supply: Connect the Vcc pin to a regulated 5 V power supply and the GND pin to the system ground.
- CAN Bus Connection: Connect the CANH and CANL pins to the corresponding lines of the CAN bus.
- Controller Interface:
- Connect the TXD pin to the CAN controller's transmit output.
- Connect the RXD pin to the CAN controller's receive input.
- Slope Control: Use the Rs pin to adjust the slew rate for electromagnetic compatibility (EMC). For high-speed operation, connect Rs to ground. For reduced slew rate, connect Rs to a resistor.
- Termination Resistor: Ensure a 120-ohm termination resistor is placed between CANH and CANL at each end of the bus.
Important Considerations and Best Practices
- Voltage Levels: Ensure the TXD input voltage is compatible with the logic levels of the CAN controller (3.3 V or 5 V).
- Bus Termination: Proper termination is critical for reliable communication and to prevent signal reflections.
- ESD Protection: The TJA1050 includes built-in ESD protection, but additional external protection may be required in extremely harsh environments.
- Standby Mode: To reduce power consumption, the TJA1050 can be placed in standby mode by controlling the Rs pin.
Example: Connecting TJA1050 to an Arduino UNO
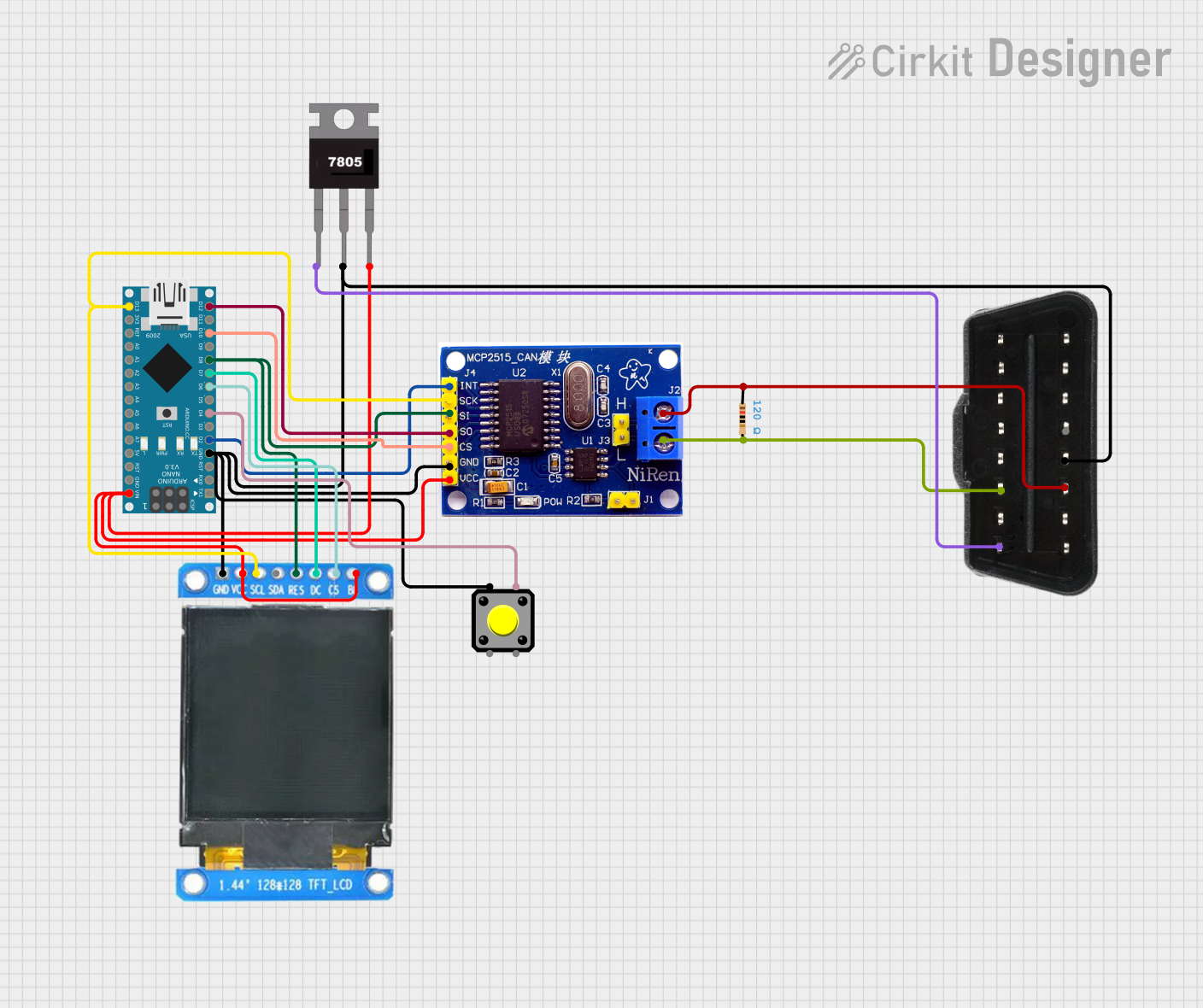
Below is an example of how to connect the TJA1050 to an Arduino UNO and send data over the CAN bus using the MCP2515 CAN controller module.
Circuit Diagram
- Connect the TJA1050 TXD pin to the MCP2515 TXD pin.
- Connect the TJA1050 RXD pin to the MCP2515 RXD pin.
- Connect CANH and CANL to the CAN bus lines.
- Ensure proper termination resistors are in place.
Arduino Code Example
#include <SPI.h>
#include <mcp_can.h>
// Define the SPI CS pin for the MCP2515 module
#define CAN_CS_PIN 10
// Initialize the MCP2515 CAN controller
MCP_CAN CAN(CAN_CS_PIN);
void setup() {
Serial.begin(115200);
// Initialize the CAN bus at 500 kbps
if (CAN.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN bus initialized successfully!");
} else {
Serial.println("Error initializing CAN bus.");
while (1);
}
// Set the CAN controller to normal mode
CAN.setMode(MCP_NORMAL);
Serial.println("CAN controller set to normal mode.");
}
void loop() {
// Example data to send
byte data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
// Send data on CAN ID 0x100
if (CAN.sendMsgBuf(0x100, 0, 8, data) == CAN_OK) {
Serial.println("Message sent successfully!");
} else {
Serial.println("Error sending message.");
}
delay(1000); // Wait 1 second before sending the next message
}
Troubleshooting and FAQs
Common Issues and Solutions
No Communication on the CAN Bus
- Verify that the CANH and CANL lines are properly connected and terminated with 120-ohm resistors.
- Ensure the TJA1050 is powered correctly (5 V on Vcc and GND connected to ground).
- Check the TXD and RXD connections between the TJA1050 and the CAN controller.
High Error Rate or Data Corruption
- Check for proper bus termination and ensure the Rs pin is configured for the desired slew rate.
- Verify that the CAN bus voltage levels are within the specified range (-27 V to +40 V).
Device Overheating
- Ensure the supply voltage does not exceed 5.5 V.
- Check for short circuits on the CANH and CANL lines.
FAQs
Q: Can the TJA1050 operate with a 3.3 V logic controller?
A: Yes, the TXD input is compatible with 3.3 V logic levels, but the Vcc supply must still be 5 V.
Q: What is the maximum cable length for the CAN bus?
A: The maximum cable length depends on the data rate. For example, at 1 Mbps, the maximum length is approximately 40 meters.
Q: How do I enable standby mode?
A: Connect the Rs pin to a high-impedance state or a specific resistor value to enable standby mode and reduce power consumption.