How to Use TCRT5000: Examples, Pinouts, and Specs
Introduction
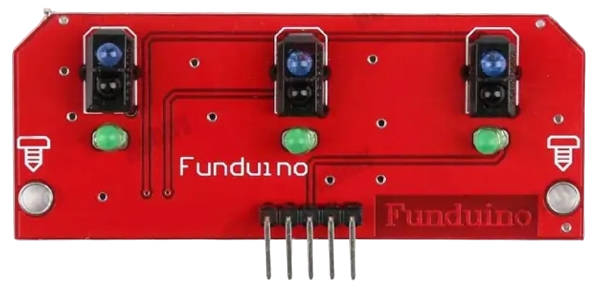
The TCRT5000 is an infrared (IR) sensor module manufactured by TECH_BOT with the part ID array. It integrates an IR emitter and a phototransistor in a single package, enabling it to detect objects and measure proximity by sensing reflected IR light. The sensor is widely used in robotics and automation systems, particularly in applications such as line-following robots, obstacle detection, and edge detection.
Explore Projects Built with TCRT5000
Explore Projects Built with TCRT5000
Common Applications
- Line-following robots
- Obstacle avoidance systems
- Edge detection in conveyor belts
- Proximity sensing in automation systems
- Reflective object detection
Technical Specifications
The TCRT5000 sensor is designed for reliable and efficient IR-based detection. Below are its key technical details:
| Parameter | Value |
|---|---|
| Operating Voltage | 3.3V to 5V |
| Operating Current | 10 mA (typical) |
| Detection Range | 2 mm to 15 mm (optimal: 2-10 mm) |
| IR Wavelength | 950 nm |
| Output Type | Analog or Digital (depending on circuit) |
| Operating Temperature | -25°C to +85°C |
| Dimensions | 10.2 mm x 5.8 mm x 7 mm |
Pin Configuration and Descriptions
The TCRT5000 has a 4-pin configuration. The table below describes each pin:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | Emitter (A) | Connects to the anode of the IR LED (positive terminal). |
| 2 | Emitter (K) | Connects to the cathode of the IR LED (negative terminal). |
| 3 | Collector | Output from the phototransistor (analog signal). |
| 4 | Emitter | Ground connection for the phototransistor. |
Usage Instructions
The TCRT5000 is straightforward to use in circuits for object detection and proximity sensing. Below are the steps and considerations for using the sensor effectively:
Connecting the TCRT5000
- Power Supply: Connect the IR emitter pins (1 and 2) to a 3.3V or 5V power source. Use a current-limiting resistor (typically 220Ω to 1kΩ) in series with the IR LED to prevent damage.
- Output Signal: Connect the phototransistor's collector pin (3) to the input of a microcontroller or an analog-to-digital converter (ADC). Use a pull-up resistor (e.g., 10kΩ) if necessary.
- Ground: Connect the emitter pin (4) of the phototransistor to the ground (GND).
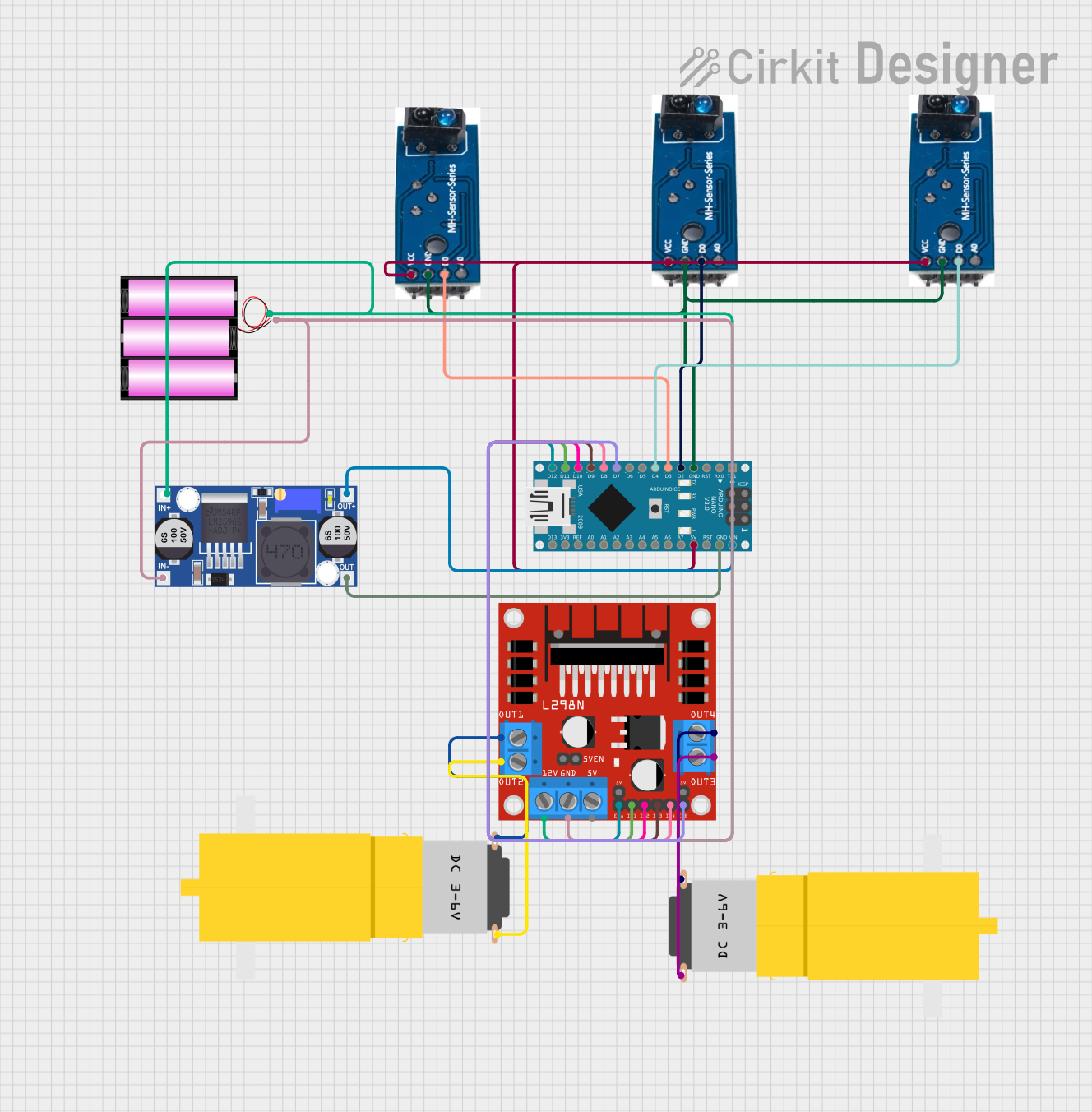
Circuit Example
Below is a simple circuit diagram for connecting the TCRT5000 to an Arduino UNO:
- IR LED: Connect a 220Ω resistor in series with the IR LED (pins 1 and 2).
- Phototransistor: Connect the collector (pin 3) to an analog input pin on the Arduino (e.g., A0) and the emitter (pin 4) to GND.
Sample Arduino Code
The following Arduino code demonstrates how to read the TCRT5000's output and detect objects:
// Define the analog pin connected to the TCRT5000 output
const int sensorPin = A0;
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
pinMode(sensorPin, INPUT); // Set the sensor pin as input
}
void loop() {
int sensorValue = analogRead(sensorPin); // Read the analog value from the sensor
// Print the sensor value to the Serial Monitor
Serial.print("Sensor Value: ");
Serial.println(sensorValue);
// Check if an object is detected (threshold value may vary)
if (sensorValue < 500) {
Serial.println("Object Detected!");
} else {
Serial.println("No Object Detected.");
}
delay(500); // Wait for 500ms before the next reading
}
Best Practices
- Optimal Distance: Ensure the object is within the optimal detection range (2-10 mm) for accurate readings.
- Ambient Light: Minimize ambient light interference by shielding the sensor or using it in controlled lighting conditions.
- Resistor Selection: Use appropriate resistors for the IR LED and phototransistor to avoid overloading the components.
Troubleshooting and FAQs
Common Issues and Solutions
No Output Signal:
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check the connections and ensure the power supply voltage is within the specified range (3.3V to 5V).
Inconsistent Readings:
- Cause: Ambient light interference or improper object placement.
- Solution: Shield the sensor from ambient light and ensure the object is within the optimal detection range.
Low Sensitivity:
- Cause: Incorrect resistor values or dirty sensor surface.
- Solution: Use recommended resistor values and clean the sensor surface with a soft cloth.
Overheating:
- Cause: Excessive current through the IR LED.
- Solution: Use a current-limiting resistor (e.g., 220Ω to 1kΩ) in series with the IR LED.
FAQs
Q1: Can the TCRT5000 detect transparent objects?
A1: The TCRT5000 may struggle to detect transparent objects due to insufficient IR reflection. Use reflective tape or a similar material to improve detection.
Q2: How do I adjust the sensitivity of the TCRT5000?
A2: Sensitivity can be adjusted by changing the pull-up resistor value on the phototransistor or by using an external comparator circuit.
Q3: Can the TCRT5000 be used outdoors?
A3: While it can be used outdoors, ambient sunlight may interfere with its performance. Consider using an IR filter or shielding the sensor.
Q4: What is the maximum detection range of the TCRT5000?
A4: The maximum detection range is approximately 15 mm, but optimal performance is achieved within 2-10 mm.
By following this documentation, users can effectively integrate the TCRT5000 into their projects for reliable object detection and proximity sensing.