How to Use gy-neo6mv2_ww: Examples, Pinouts, and Specs
Introduction
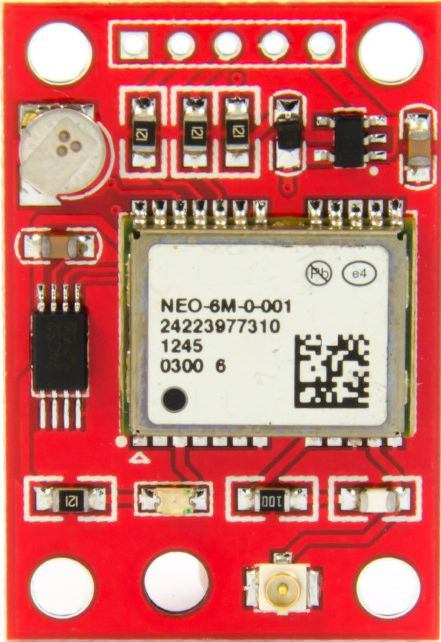
The GY-NEO6MV2 is a GPS module that provides accurate positioning data. It features the NEO-6M GPS chip and includes an onboard antenna, making it suitable for various navigation and tracking applications. This module is widely used in projects requiring precise location information, such as drones, vehicle tracking systems, and outdoor navigation devices.
Explore Projects Built with gy-neo6mv2_ww
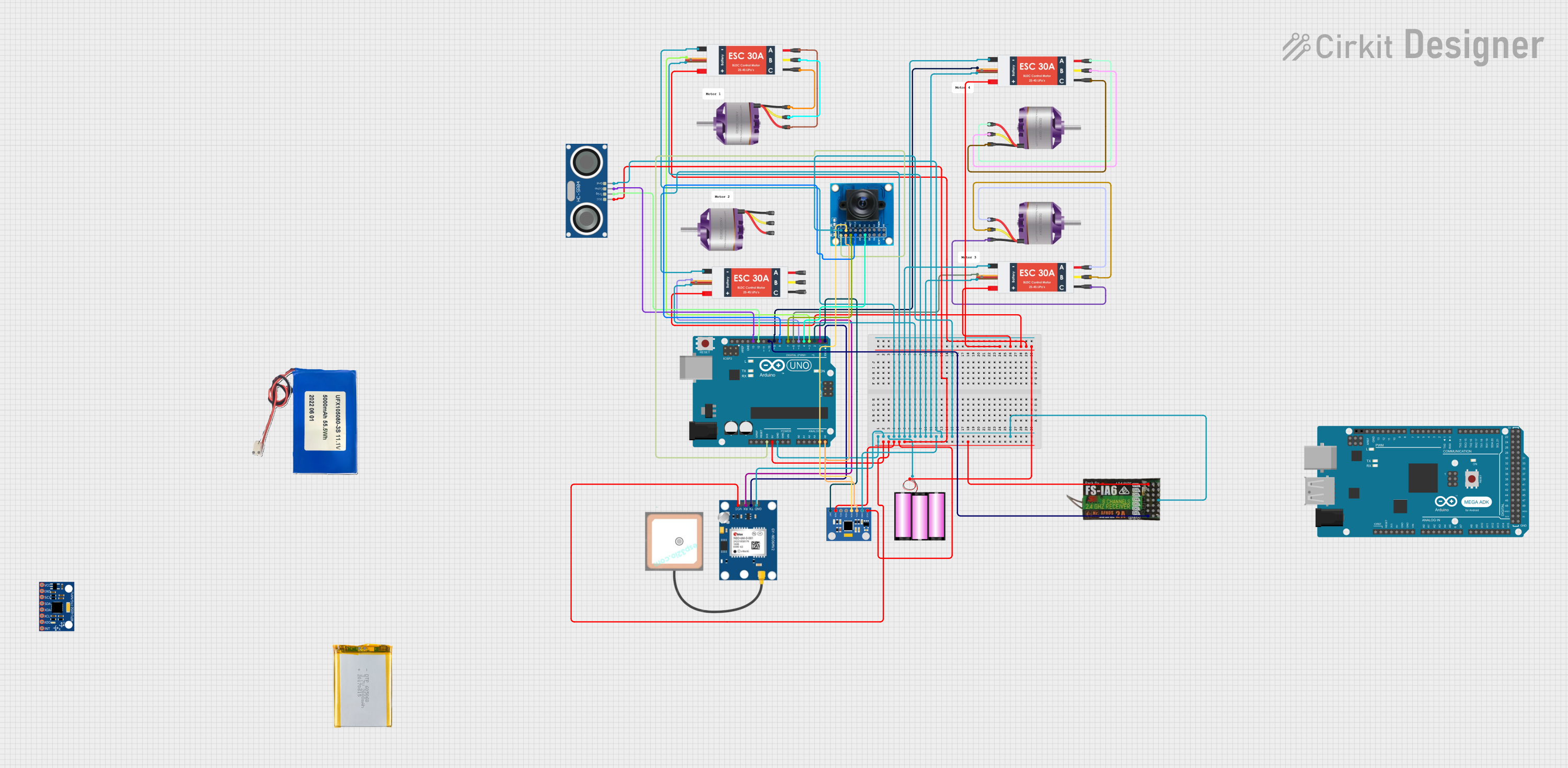

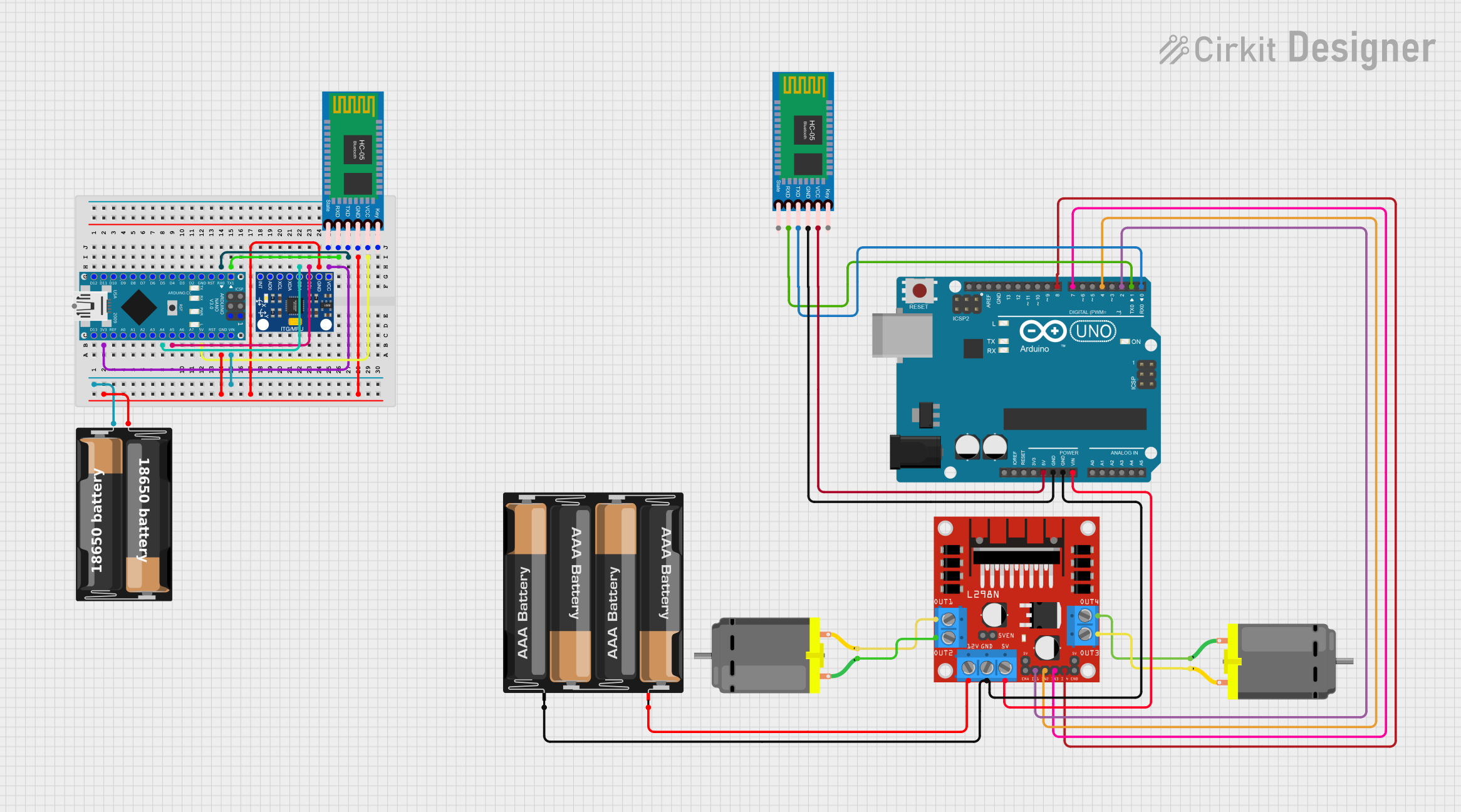
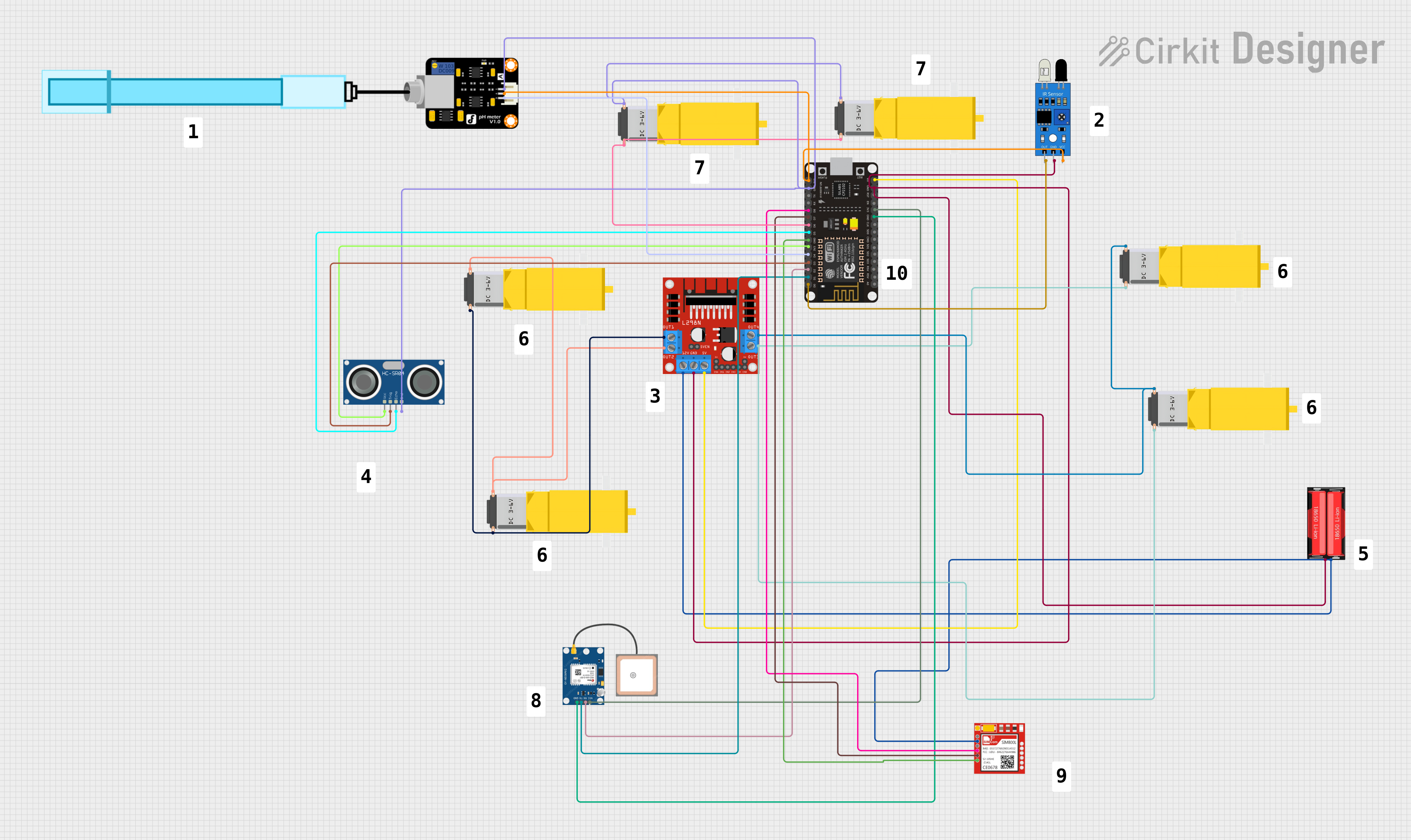
Explore Projects Built with gy-neo6mv2_ww
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| GPS Chip | NEO-6M |
| Operating Voltage | 3.3V - 5V |
| Current Consumption | 45mA (typical) |
| Position Accuracy | 2.5m CEP |
| Update Rate | 1Hz (default), up to 5Hz |
| Communication | UART |
| Antenna | Onboard |
| Dimensions | 25mm x 35mm |
Pin Configuration and Descriptions
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V - 5V) |
| 2 | GND | Ground |
| 3 | TX | Transmit data (UART) |
| 4 | RX | Receive data (UART) |
| 5 | PPS | Pulse per second (time pulse, optional) |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the VCC pin to a 3.3V or 5V power supply and the GND pin to the ground.
- UART Communication: Connect the TX pin of the GPS module to the RX pin of your microcontroller (e.g., Arduino UNO) and the RX pin of the GPS module to the TX pin of your microcontroller.
- Optional PPS Pin: If you need precise timing information, connect the PPS pin to a digital input on your microcontroller.
Important Considerations and Best Practices
- Antenna Placement: Ensure the onboard antenna has a clear view of the sky for optimal satellite reception.
- Power Supply: Use a stable power supply to avoid fluctuations that could affect the GPS module's performance.
- Baud Rate: The default baud rate for the NEO-6M GPS module is 9600. Ensure your microcontroller's UART is set to the same baud rate.
Example Code for Arduino UNO
#include <SoftwareSerial.h>
#include <TinyGPS++.h>
// Create a SoftwareSerial object for communication with the GPS module
SoftwareSerial ss(4, 3); // RX, TX
// Create a TinyGPS++ object
TinyGPSPlus gps;
void setup() {
Serial.begin(9600); // Initialize serial communication with the computer
ss.begin(9600); // Initialize serial communication with the GPS module
Serial.println("GPS Module Test");
}
void loop() {
while (ss.available() > 0) {
gps.encode(ss.read()); // Decode the data from the GPS module
if (gps.location.isUpdated()) {
// Print the latitude and longitude to the Serial Monitor
Serial.print("Latitude: ");
Serial.println(gps.location.lat(), 6);
Serial.print("Longitude: ");
Serial.println(gps.location.lng(), 6);
}
}
}
Troubleshooting and FAQs
Common Issues Users Might Face
No GPS Fix: The module is not able to get a GPS fix.
- Solution: Ensure the antenna has a clear view of the sky. Move the module to an open area if necessary.
No Data Output: The module is not sending any data.
- Solution: Check the power connections and ensure the module is powered correctly. Verify the UART connections and baud rate settings.
Inaccurate Positioning: The position data is not accurate.
- Solution: Ensure the antenna is placed correctly and there are no obstructions. Wait for a few minutes to get a stable fix.
Solutions and Tips for Troubleshooting
- Check Connections: Ensure all connections are secure and correct.
- Verify Baud Rate: Make sure the baud rate of the GPS module matches the baud rate set in your microcontroller code.
- Use a Stable Power Supply: Fluctuations in power supply can affect the performance of the GPS module.
By following this documentation, users should be able to effectively integrate and utilize the GY-NEO6MV2 GPS module in their projects. Whether you are a beginner or an experienced user, this guide provides the necessary information to get started and troubleshoot common issues.