How to Use TMC5160 Stepper Driver: Examples, Pinouts, and Specs
Introduction
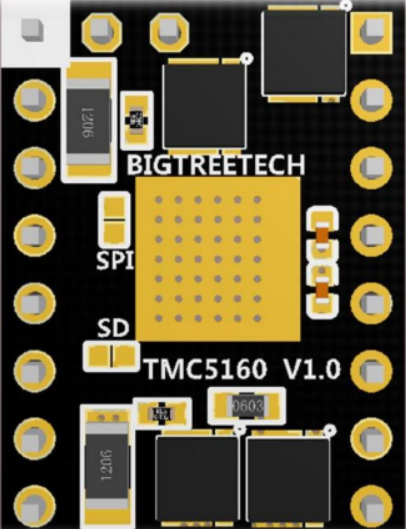
The TMC5160 is a high-performance stepper motor driver manufactured by Trinamic (Part ID: مخ الماتور). It is designed to provide smooth and precise control of stepper motors through advanced microstepping capabilities. The TMC5160 integrates features such as stall detection, current control, and multiple communication interfaces, making it a versatile choice for demanding applications.
Explore Projects Built with TMC5160 Stepper Driver


Explore Projects Built with TMC5160 Stepper Driver
Common Applications
- Robotics: Enables precise motor control for robotic arms and mobile robots.
- 3D Printing: Ensures smooth motion and accurate positioning for high-quality prints.
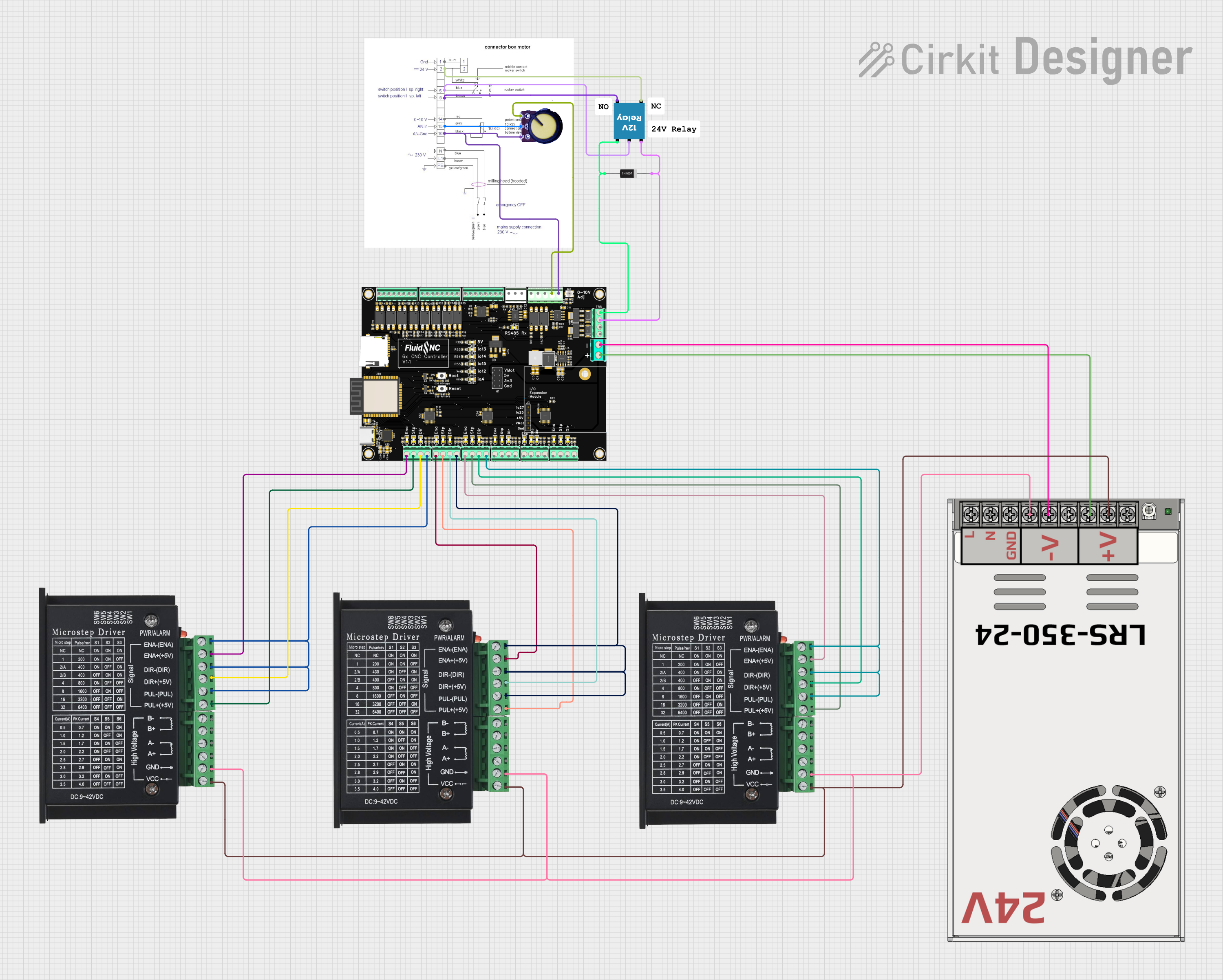
- CNC Machines: Provides reliable and efficient motor control for milling, cutting, and engraving.
- Industrial Automation: Suitable for conveyor systems, pick-and-place machines, and other automated systems.
Technical Specifications
The TMC5160 is packed with features that make it a robust and flexible stepper motor driver. Below are its key technical details:
Key Specifications
| Parameter | Value |
|---|---|
| Supply Voltage (VM) | 8V to 60V |
| Logic Voltage (VIO) | 3.3V or 5V |
| Maximum Motor Current | Up to 20A peak (with proper cooling) |
| Microstepping Resolution | Up to 256 microsteps per full step |
| Communication Interfaces | SPI, Step/Dir |
| Integrated Features | StallGuard2™, CoolStep™, SpreadCycle™, StealthChop2™ |
| Operating Temperature | -40°C to +125°C |
Pin Configuration and Descriptions
The TMC5160 is typically available in a 48-pin QFN package. Below is a summary of its pin configuration:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VM | Motor power supply (8V to 60V) |
| 2 | GND | Ground |
| 3 | VIO | Logic voltage input (3.3V or 5V) |
| 4 | SPI_MOSI | SPI Master Out Slave In |
| 5 | SPI_MISO | SPI Master In Slave Out |
| 6 | SPI_SCK | SPI Clock |
| 7 | SPI_CS | SPI Chip Select |
| 8 | STEP | Step pulse input |
| 9 | DIR | Direction control input |
| 10 | EN | Enable input |
| 11 | DIAG0 | Diagnostic output 0 |
| 12 | DIAG1 | Diagnostic output 1 |
| 13-48 | Other Pins | Motor phases, configuration, and power |
Refer to the TMC5160 datasheet for a complete pinout and detailed descriptions.
Usage Instructions
The TMC5160 can be used in a variety of applications requiring precise stepper motor control. Below are the steps and best practices for using the component:
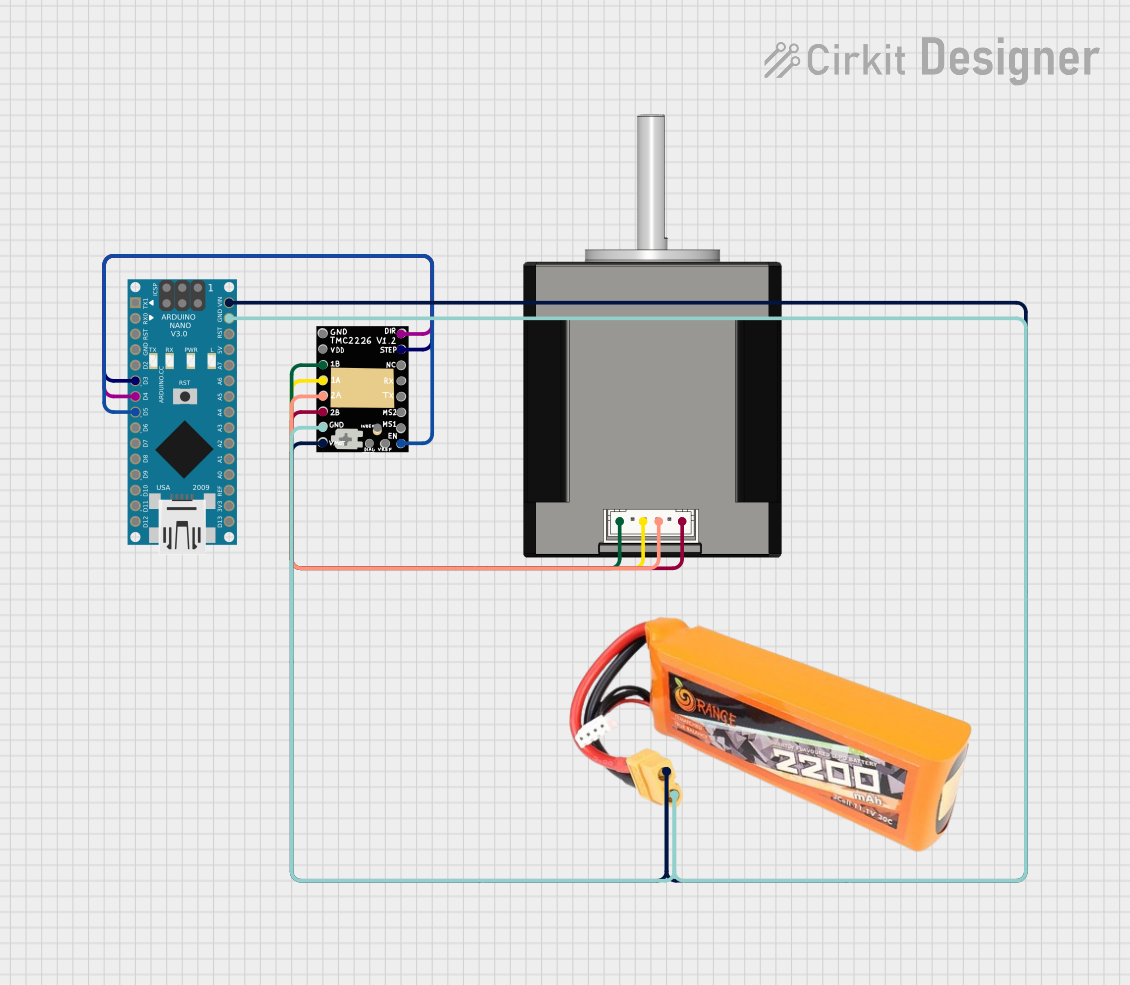
Basic Circuit Setup
- Power Supply: Connect the motor power supply (VM) to a voltage source between 8V and 60V. Ensure the power supply can handle the motor's current requirements.
- Logic Voltage: Provide a 3.3V or 5V logic voltage to the VIO pin.
- Motor Connection: Connect the stepper motor's coils to the appropriate motor phase pins (e.g., A1, A2, B1, B2).
- Control Interface: Use SPI or Step/Dir pins to control the driver. For SPI, connect MOSI, MISO, SCK, and CS to your microcontroller.
- Enable Pin: Pull the EN pin low to enable the driver.
Important Considerations
- Cooling: The TMC5160 can handle high currents, but proper cooling (e.g., heatsinks or fans) is essential to prevent overheating.
- Microstepping: Configure the microstepping resolution via SPI for smoother motor operation.
- Stall Detection: Use the StallGuard2™ feature to detect motor stalls and adjust current dynamically.
- Noise Reduction: Enable StealthChop2™ for silent motor operation, especially in noise-sensitive environments.
Example: Using TMC5160 with Arduino UNO
Below is an example of how to control the TMC5160 using an Arduino UNO via SPI:
#include <SPI.h>
// Define SPI pins for Arduino UNO
#define CS_PIN 10 // Chip Select
#define MOSI_PIN 11 // Master Out Slave In
#define MISO_PIN 12 // Master In Slave Out
#define SCK_PIN 13 // SPI Clock
void setup() {
// Initialize SPI communication
SPI.begin();
pinMode(CS_PIN, OUTPUT);
digitalWrite(CS_PIN, HIGH); // Set CS high to deselect the driver
// Configure the TMC5160 (example: set microstepping to 256)
digitalWrite(CS_PIN, LOW); // Select the driver
SPI.transfer(0x00); // Send address byte (example address)
SPI.transfer(0xFF); // Send data byte (example data)
digitalWrite(CS_PIN, HIGH); // Deselect the driver
}
void loop() {
// Example: Send step pulses to the TMC5160
digitalWrite(CS_PIN, LOW); // Select the driver
SPI.transfer(0x01); // Example command to move motor
digitalWrite(CS_PIN, HIGH); // Deselect the driver
delay(10); // Wait for motor to move
}
Note: Replace the example SPI commands with actual configuration and control commands based on your application.
Troubleshooting and FAQs
Common Issues
Motor Not Moving:
- Ensure the EN pin is pulled low to enable the driver.
- Verify the motor connections and power supply voltage.
- Check the SPI or Step/Dir signals for proper communication.
Overheating:
- Ensure adequate cooling (e.g., heatsinks or fans).
- Reduce the motor current setting if possible.
Noisy Operation:
- Enable StealthChop2™ mode for quieter operation.
- Check for loose motor connections or improper wiring.
Stall Detection Not Working:
- Verify that StallGuard2™ is enabled and properly configured.
- Ensure the motor is not overloaded beyond its torque capacity.
FAQs
Q: Can the TMC5160 drive a bipolar stepper motor?
A: Yes, the TMC5160 is designed to drive bipolar stepper motors with high precision.
Q: How do I configure the microstepping resolution?
A: Use the SPI interface to set the microstepping resolution. Refer to the datasheet for the specific register and configuration details.
Q: What is the maximum current the TMC5160 can handle?
A: The TMC5160 can handle up to 20A peak current with proper cooling. Ensure your setup includes adequate thermal management.
Q: Can I use the TMC5160 with a 12V power supply?
A: Yes, the TMC5160 supports motor power supply voltages between 8V and 60V, so a 12V supply is within the supported range.
For additional details, refer to the official TMC5160 datasheet and application notes provided by Trinamic.