How to Use VL53L4CX: Examples, Pinouts, and Specs

Introduction
The VL53L4CX is a time-of-flight (ToF) distance sensor manufactured by Adafruit (Part ID: 5425). It utilizes advanced laser technology to measure distances with high accuracy and precision. This sensor is capable of detecting objects at distances up to 6 meters and operates reliably in various lighting conditions, including complete darkness. Its compact design and low power consumption make it ideal for applications in robotics, drones, automation, and proximity sensing.
Explore Projects Built with VL53L4CX
Explore Projects Built with VL53L4CX
Common Applications
- Obstacle detection in robotics and drones
- Proximity sensing in automation systems
- Gesture recognition
- Distance measurement in industrial equipment
- Smart home devices (e.g., automatic doors, lighting systems)
Technical Specifications
The VL53L4CX offers robust performance and flexibility for a wide range of applications. Below are its key technical details:
| Parameter | Value |
|---|---|
| Operating Voltage | 2.6V to 3.5V |
| Communication Interface | I²C |
| Measurement Range | 0.1m to 6m |
| Accuracy | ±5mm (typical) |
| Field of View (FoV) | 18° (typical) |
| Power Consumption | 20mW (active mode) |
| Operating Temperature | -20°C to +85°C |
| Dimensions | 4.4mm x 2.4mm x 1.0mm |
Pin Configuration
The VL53L4CX sensor module typically comes with the following pinout:
| Pin | Name | Description |
|---|---|---|
| 1 | VIN | Power supply input (2.6V to 3.5V) |
| 2 | GND | Ground connection |
| 3 | SDA | I²C data line |
| 4 | SCL | I²C clock line |
| 5 | XSHUT | Shutdown pin (active low, optional for power saving) |
| 6 | GPIO1 | Interrupt output (optional, configurable) |
Usage Instructions
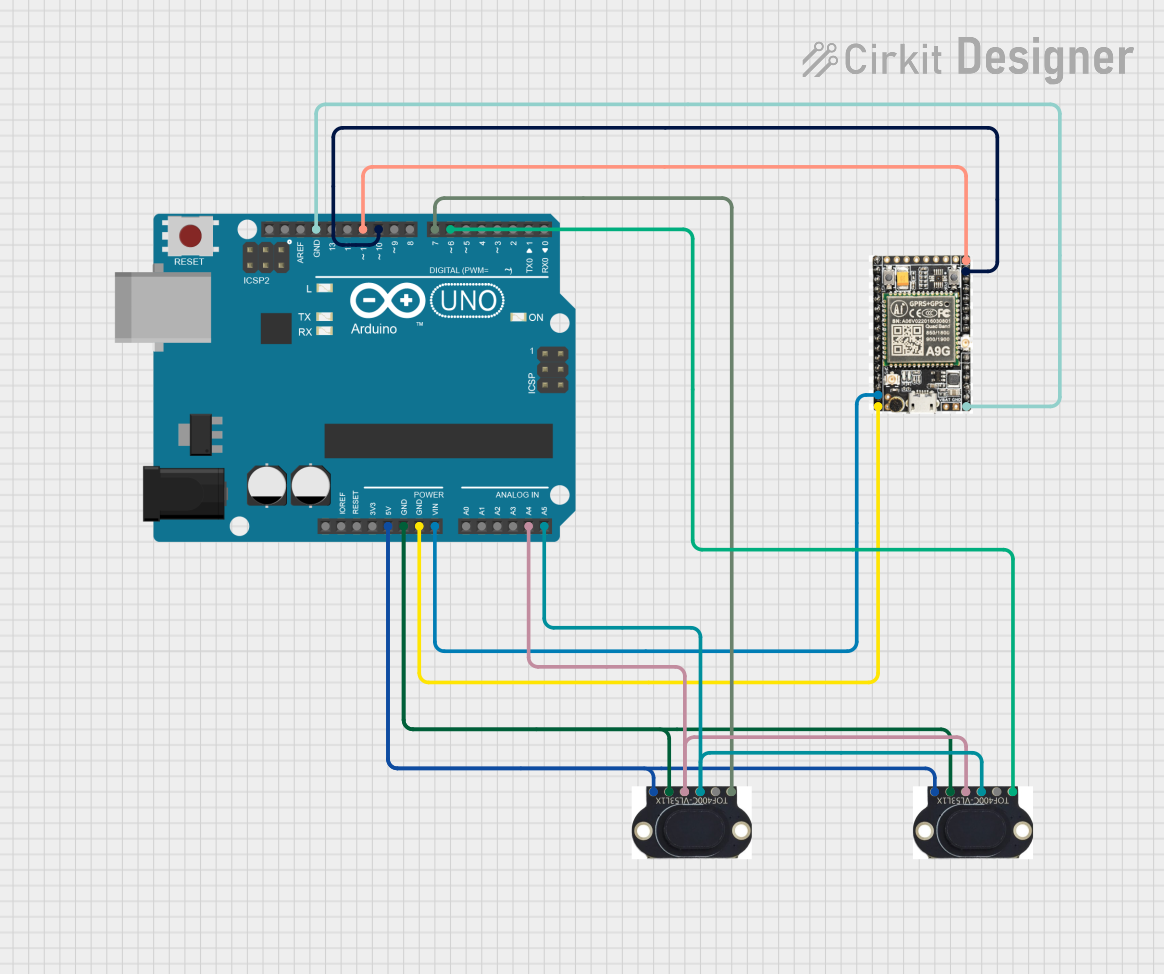
Connecting the VL53L4CX to an Arduino UNO
To use the VL53L4CX with an Arduino UNO, follow these steps:
- Connect the VIN pin of the sensor to the 3.3V pin on the Arduino.
- Connect the GND pin of the sensor to the GND pin on the Arduino.
- Connect the SDA pin of the sensor to the A4 pin on the Arduino (I²C data line).
- Connect the SCL pin of the sensor to the A5 pin on the Arduino (I²C clock line).
- Optionally, connect the XSHUT pin to a digital pin on the Arduino for power management.
Sample Arduino Code
Below is an example Arduino sketch to read distance measurements from the VL53L4CX using the Adafruit VL53L4CX library:
#include <Wire.h>
#include <Adafruit_VL53L4CX.h>
// Create an instance of the VL53L4CX sensor
Adafruit_VL53L4CX vl53l4cx;
void setup() {
Serial.begin(115200);
while (!Serial) {
delay(10); // Wait for Serial Monitor to open
}
// Initialize I2C communication
if (!vl53l4cx.begin()) {
Serial.println("Failed to initialize VL53L4CX sensor!");
while (1) {
delay(10); // Stay in loop if initialization fails
}
}
Serial.println("VL53L4CX sensor initialized successfully.");
}
void loop() {
VL53L4CX_MultiRangingData_t rangingData;
// Perform a distance measurement
if (vl53l4cx.rangingTest(&rangingData)) {
Serial.println("Error during ranging test!");
return;
}
// Print distance measurement for each detected object
for (uint8_t i = 0; i < rangingData.NumberOfObjects; i++) {
Serial.print("Object ");
Serial.print(i + 1);
Serial.print(": Distance = ");
Serial.print(rangingData.RangeMilliMeter[i]);
Serial.println(" mm");
}
delay(100); // Wait before the next measurement
}
Important Considerations
- Ensure the sensor is not exposed to direct sunlight or reflective surfaces, as these may affect accuracy.
- Use pull-up resistors (typically 4.7kΩ) on the SDA and SCL lines if not already included on the breakout board.
- The XSHUT pin can be used to put the sensor into a low-power state when not in use.
- Avoid placing the sensor too close to objects (<10cm), as this may reduce measurement accuracy.
Troubleshooting and FAQs
Common Issues
Sensor not detected on I²C bus:
- Ensure the wiring is correct and matches the pinout.
- Verify that the I²C address (default: 0x29) is not conflicting with other devices on the bus.
- Check for proper pull-up resistors on the SDA and SCL lines.
Inaccurate distance measurements:
- Ensure the sensor is perpendicular to the target surface.
- Avoid reflective or transparent surfaces, as they may cause measurement errors.
- Check for obstructions in the sensor's field of view.
Sensor initialization failure:
- Confirm that the sensor is powered correctly (2.6V to 3.5V).
- Ensure the Adafruit VL53L4CX library is installed and up to date.
FAQs
Q: Can the VL53L4CX measure distances in complete darkness?
A: Yes, the sensor uses an infrared laser for distance measurement, making it independent of ambient light.
Q: What is the maximum range of the VL53L4CX?
A: The sensor can measure distances up to 6 meters under optimal conditions.
Q: Can I use multiple VL53L4CX sensors on the same I²C bus?
A: Yes, but you must change the I²C address of each sensor using the XSHUT pin to avoid address conflicts.
Q: Is the VL53L4CX eye-safe?
A: Yes, the sensor complies with Class 1 laser safety standards, making it safe for use in consumer applications.