How to Use ULN 2003: Examples, Pinouts, and Specs
Introduction
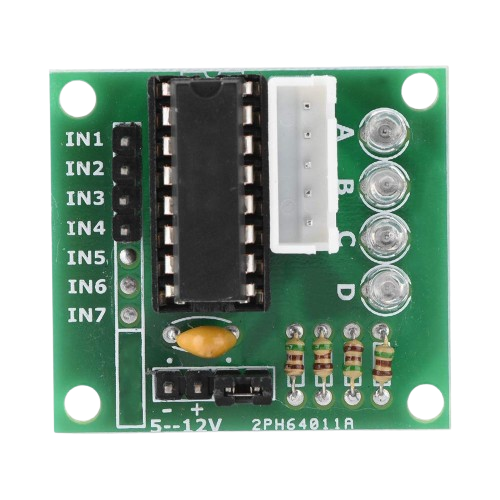
The ULN 2003 is a high-voltage, high-current Darlington transistor array manufactured by ULN. It contains seven NPN Darlington pairs, each capable of driving high-current loads up to 500 mA per channel. The component is widely used for interfacing low-power control circuits, such as microcontrollers, with high-power loads like stepper motors, relays, and LEDs. It also includes built-in flyback diodes to protect against voltage spikes when driving inductive loads.
Explore Projects Built with ULN 2003
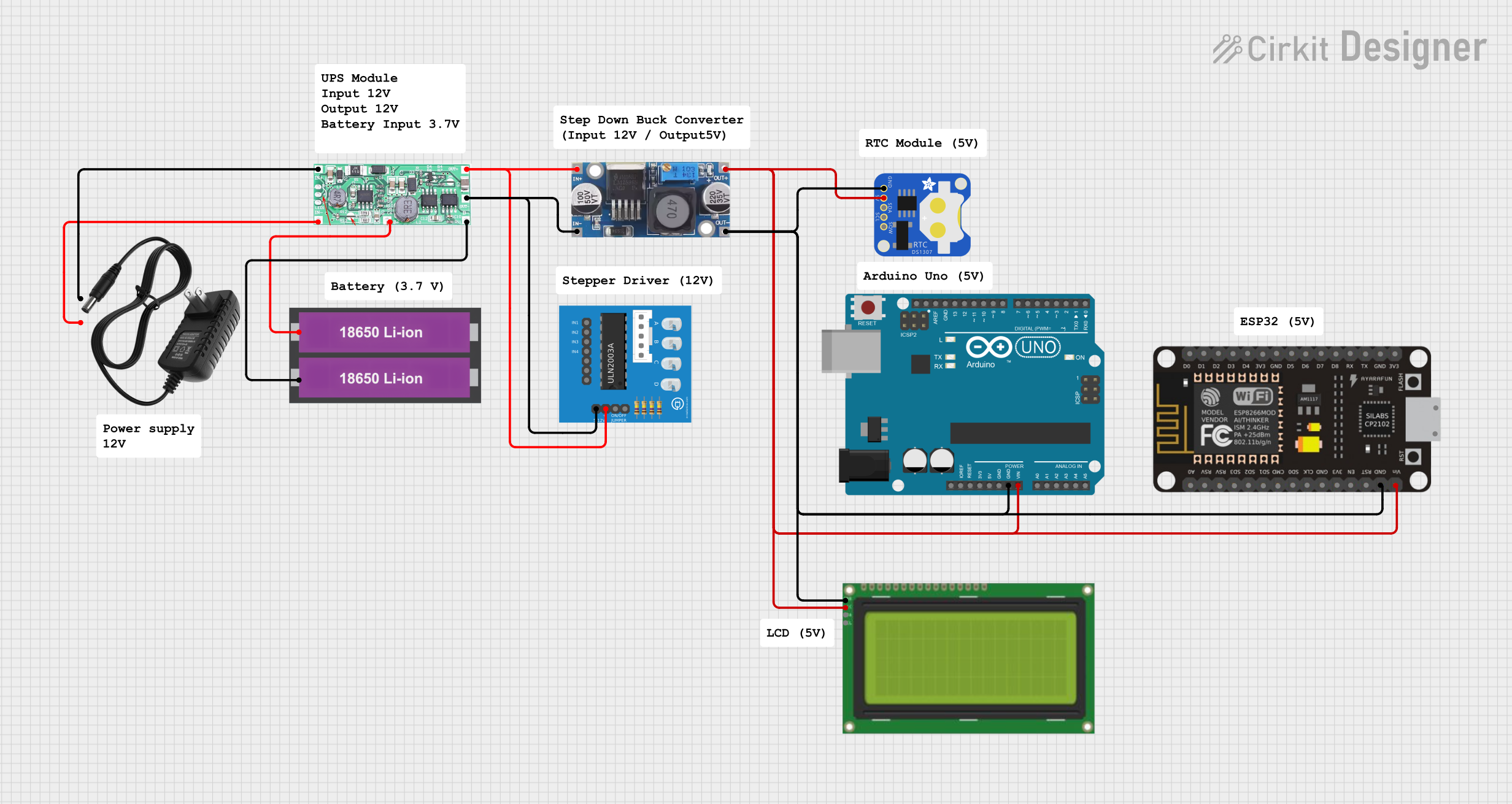
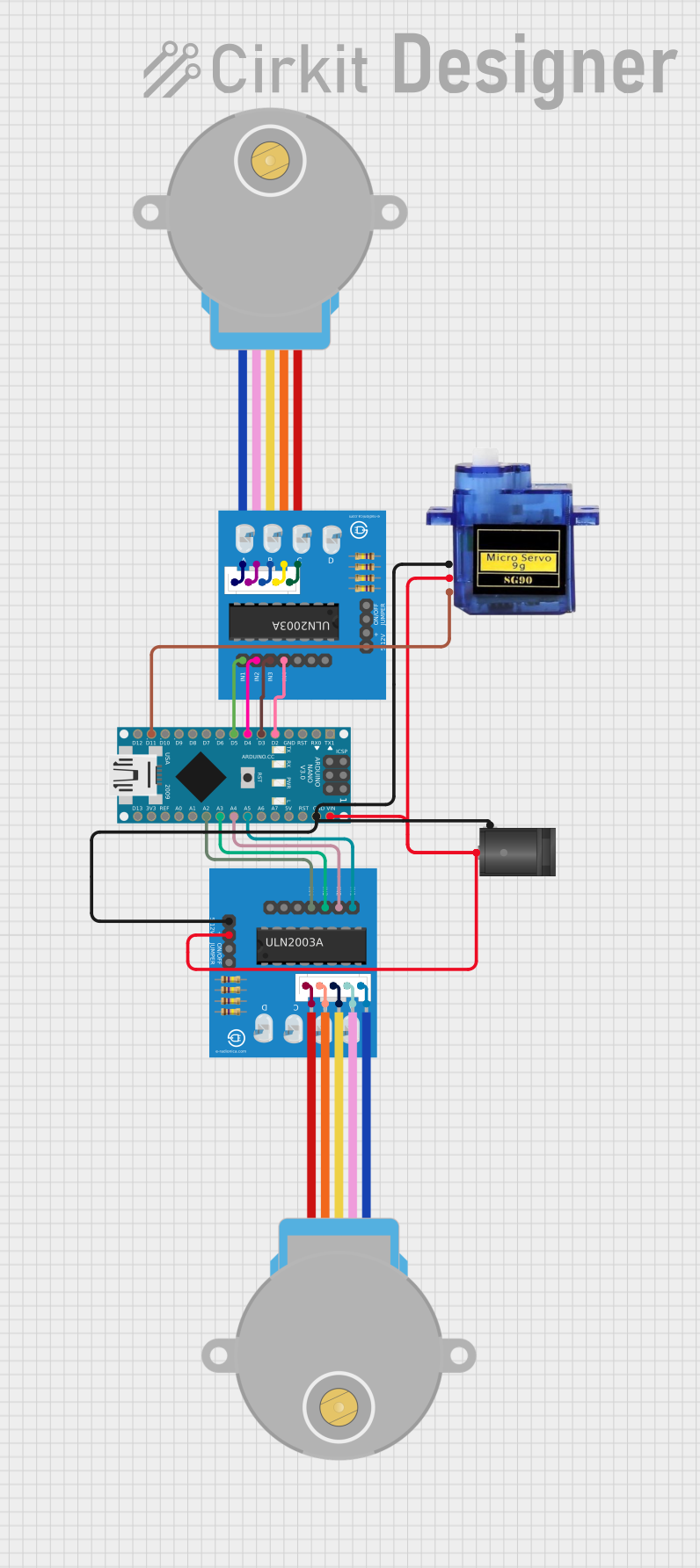
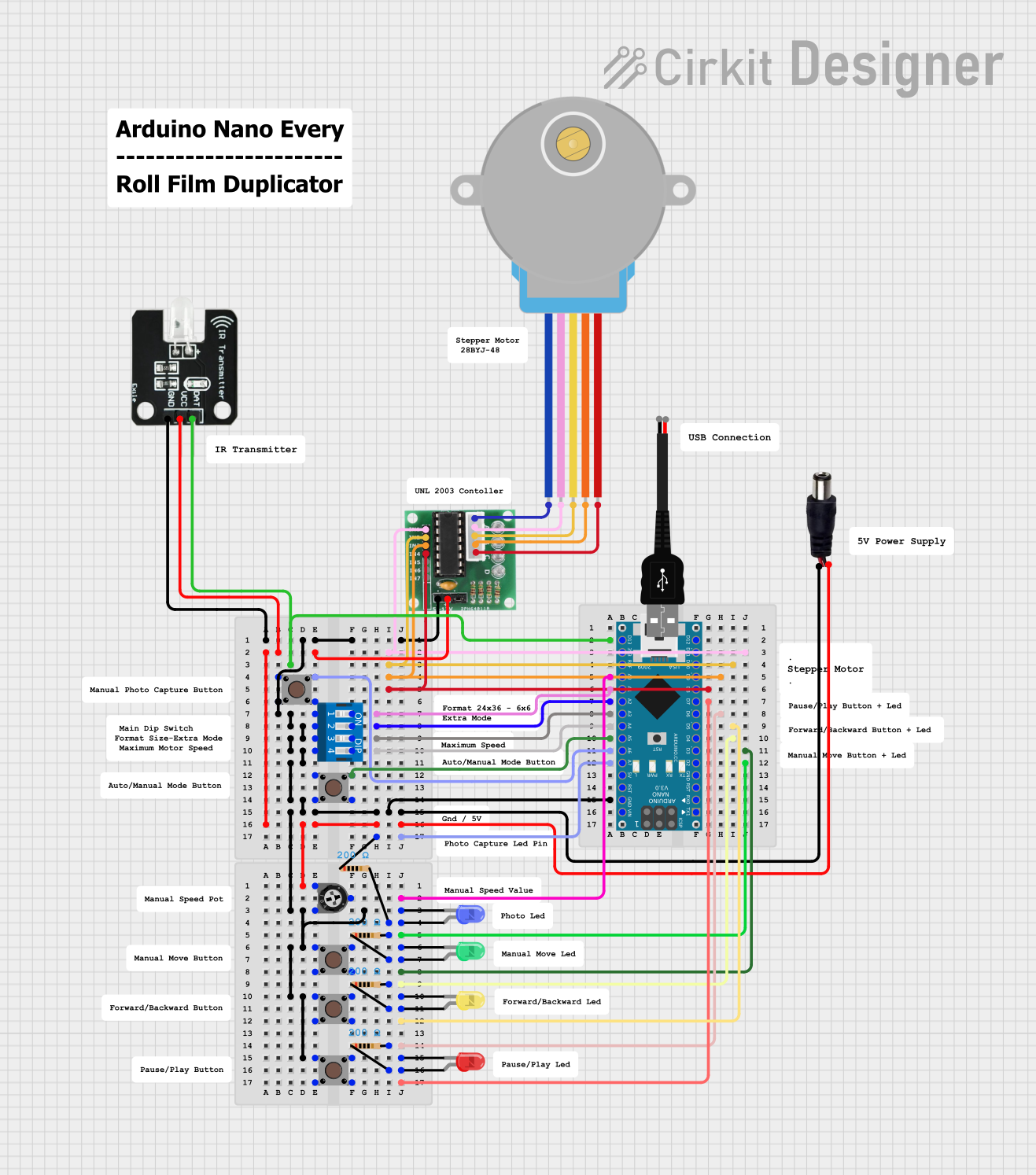
Explore Projects Built with ULN 2003
Common Applications and Use Cases
- Driving stepper motors in robotics and automation systems
- Controlling relays in industrial and home automation
- Powering LED arrays in display systems
- Interfacing microcontrollers with high-current loads
Technical Specifications
The ULN 2003 is designed to simplify the control of high-current loads by providing a robust interface between low-power control signals and high-power devices.
Key Technical Details
- Operating Voltage: Up to 50 V
- Output Current: 500 mA per channel (maximum)
- Number of Channels: 7
- Input Voltage: Compatible with TTL and CMOS logic levels
- Built-in Protection: Flyback diodes for inductive load protection
- Package Type: DIP-16 or SOP-16
Pin Configuration and Descriptions
The ULN 2003 has 16 pins, with the following configuration:
| Pin Number | Name | Description |
|---|---|---|
| 1-7 | Input 1-7 | Logic-level inputs for controlling the corresponding output channels. |
| 8 | GND | Ground connection for the device. |
| 9-15 | Output 1-7 | High-current outputs for driving loads. |
| 16 | COM (Common) | Common cathode connection for the internal flyback diodes (connect to V+). |
Usage Instructions
The ULN 2003 is straightforward to use in circuits, especially for driving stepper motors or other high-current loads. Below are the steps and considerations for using the component effectively.
How to Use the ULN 2003 in a Circuit
- Connect the Inputs: Connect the input pins (1-7) to the control signals from a microcontroller or other logic-level device.
- Connect the Outputs: Connect the output pins (9-15) to the load (e.g., motor, relay, or LED).
- Power Supply: Connect the common pin (COM) to the positive terminal of the load's power supply. This ensures proper operation of the internal flyback diodes.
- Ground Connection: Connect the GND pin (8) to the ground of the power supply and the control circuit.
- Logic Levels: Ensure the input logic levels are compatible with the ULN 2003 (TTL or CMOS).
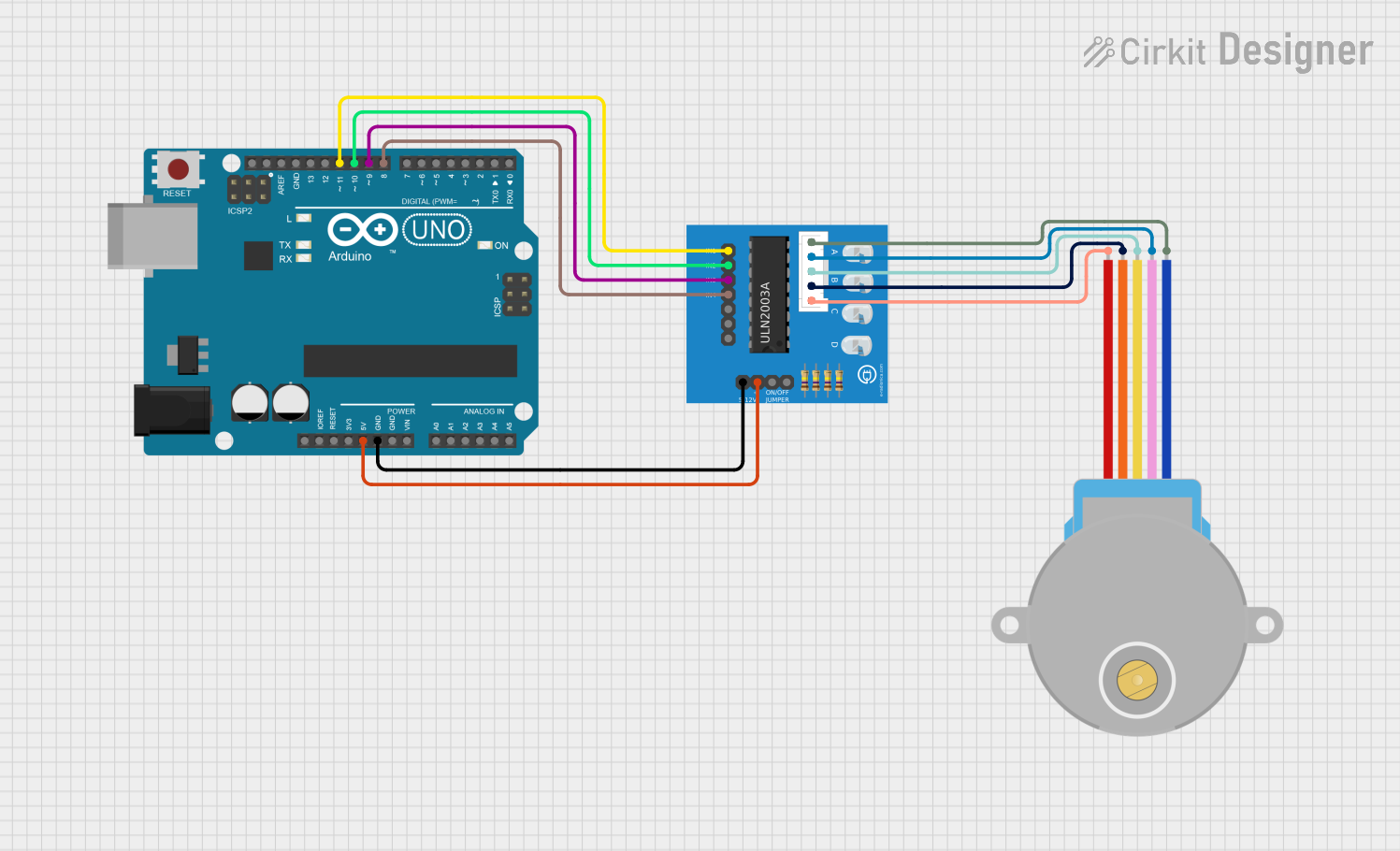
Example: Driving a Stepper Motor with Arduino UNO
The ULN 2003 is commonly used to drive stepper motors. Below is an example of how to connect and control a stepper motor using an Arduino UNO.
Circuit Diagram
- Connect the ULN 2003 inputs (pins 1-4) to Arduino digital pins (e.g., D8-D11).
- Connect the ULN 2003 outputs (pins 9-12) to the stepper motor coils.
- Connect the COM pin (16) to the motor's power supply (e.g., 12V).
- Connect the GND pin (8) to the Arduino GND.
Arduino Code
// Example code to control a stepper motor using ULN 2003 and Arduino UNO
#include <Stepper.h>
// Define the number of steps per revolution for your stepper motor
#define STEPS_PER_REV 200
// Initialize the Stepper library with the ULN 2003 pins
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
// Set the speed of the stepper motor (in RPM)
stepper.setSpeed(60);
Serial.begin(9600);
Serial.println("Stepper Motor Control Initialized");
}
void loop() {
// Rotate the motor one full revolution clockwise
Serial.println("Rotating clockwise...");
stepper.step(STEPS_PER_REV);
delay(1000); // Wait for 1 second
// Rotate the motor one full revolution counterclockwise
Serial.println("Rotating counterclockwise...");
stepper.step(-STEPS_PER_REV);
delay(1000); // Wait for 1 second
}
Important Considerations and Best Practices
- Power Dissipation: Ensure the total power dissipation does not exceed the device's maximum rating.
- Flyback Diodes: Always connect the COM pin to the load's power supply to enable the internal flyback diodes.
- Heat Management: If driving multiple high-current loads, consider adding a heat sink to prevent overheating.
- Input Logic Levels: Verify that the input logic levels are within the specified range for reliable operation.
Troubleshooting and FAQs
Common Issues and Solutions
Problem: The load is not turning on.
- Solution: Check the input signal levels and ensure they are within the specified range. Verify the connections to the load and power supply.
Problem: The ULN 2003 is overheating.
- Solution: Ensure the total current does not exceed the maximum rating. Add a heat sink if necessary.
Problem: Voltage spikes are damaging the circuit.
- Solution: Verify that the COM pin is connected to the load's power supply to enable the internal flyback diodes.
Problem: The stepper motor is not rotating correctly.
- Solution: Check the wiring of the stepper motor coils and ensure the correct sequence is being sent from the microcontroller.
FAQs
Can the ULN 2003 drive a DC motor? Yes, the ULN 2003 can drive a DC motor, but ensure the motor's current and voltage are within the component's limits.
What is the maximum current per channel? The maximum current per channel is 500 mA.
Do I need external diodes for inductive loads? No, the ULN 2003 has built-in flyback diodes for inductive load protection.
Can I use all seven channels simultaneously? Yes, but ensure the total current does not exceed the device's maximum power dissipation.
This documentation provides a comprehensive guide to using the ULN 2003 effectively in various applications.