How to Use ULTASONIC: Examples, Pinouts, and Specs

Introduction
The ultrasonic sensor is an electronic component that uses high-frequency sound waves to measure distances or detect objects. It operates by emitting ultrasonic waves and measuring the time it takes for the echo to return after bouncing off an object. This time-of-flight measurement is then used to calculate the distance to the object.
Explore Projects Built with ULTASONIC
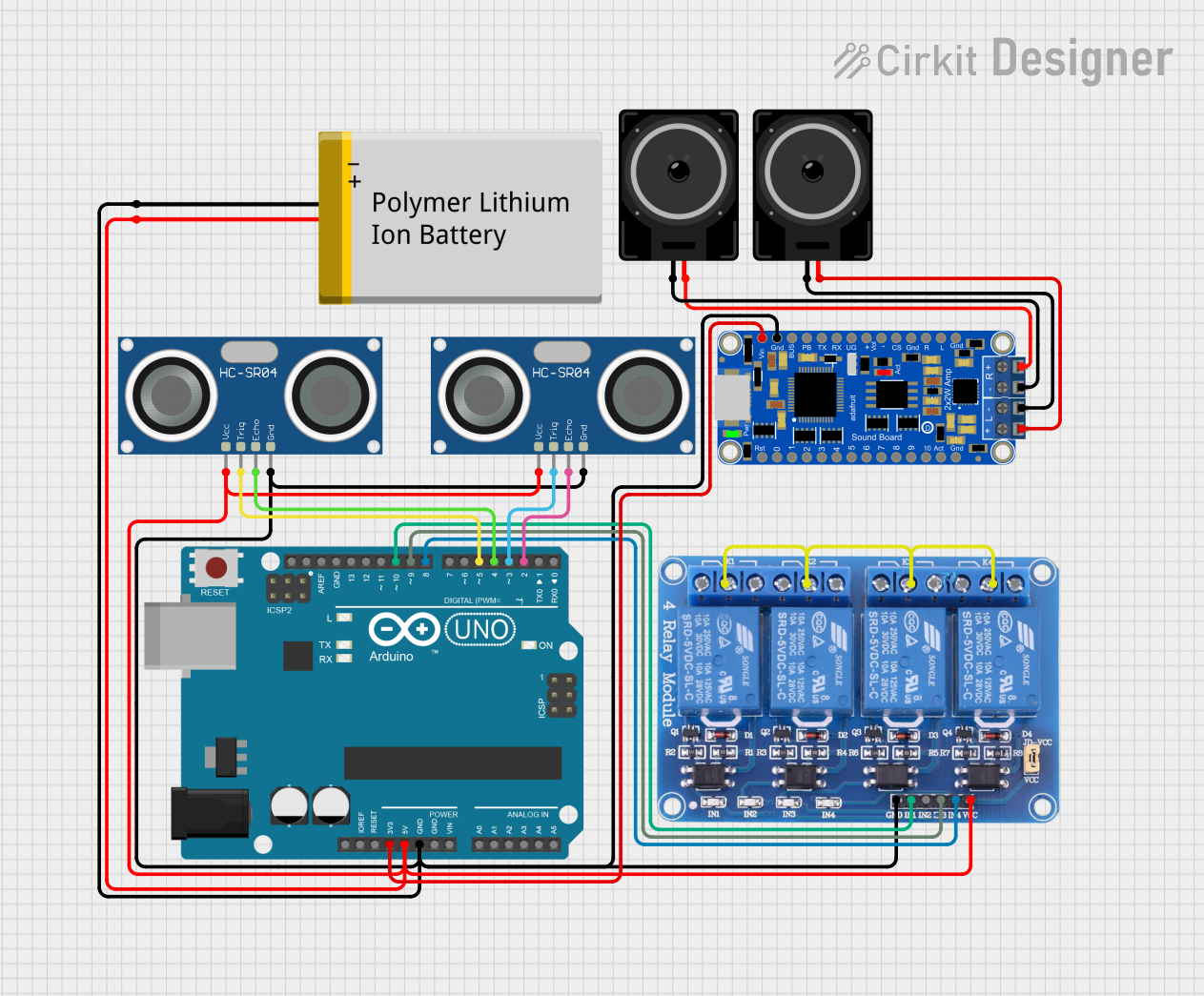
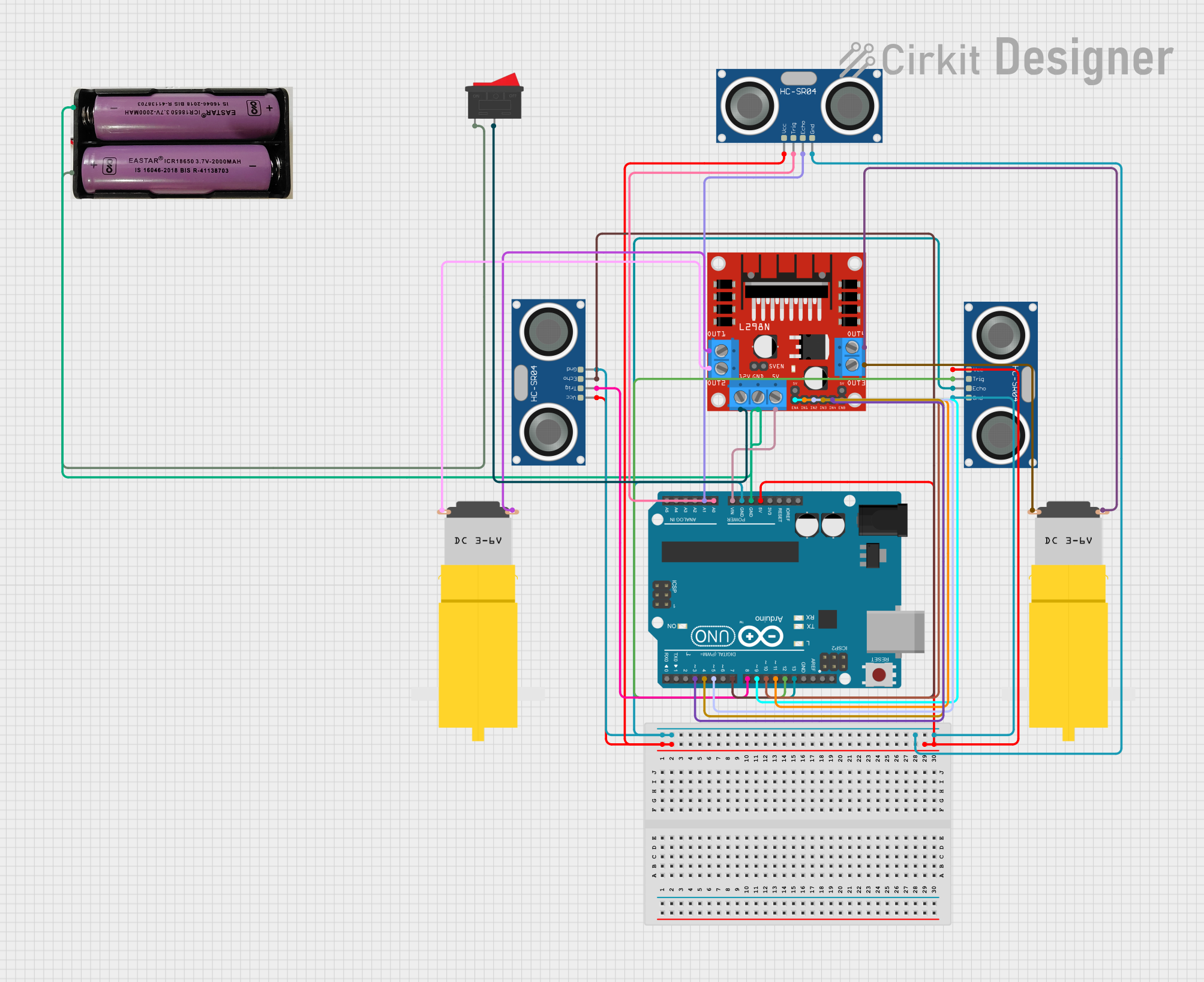
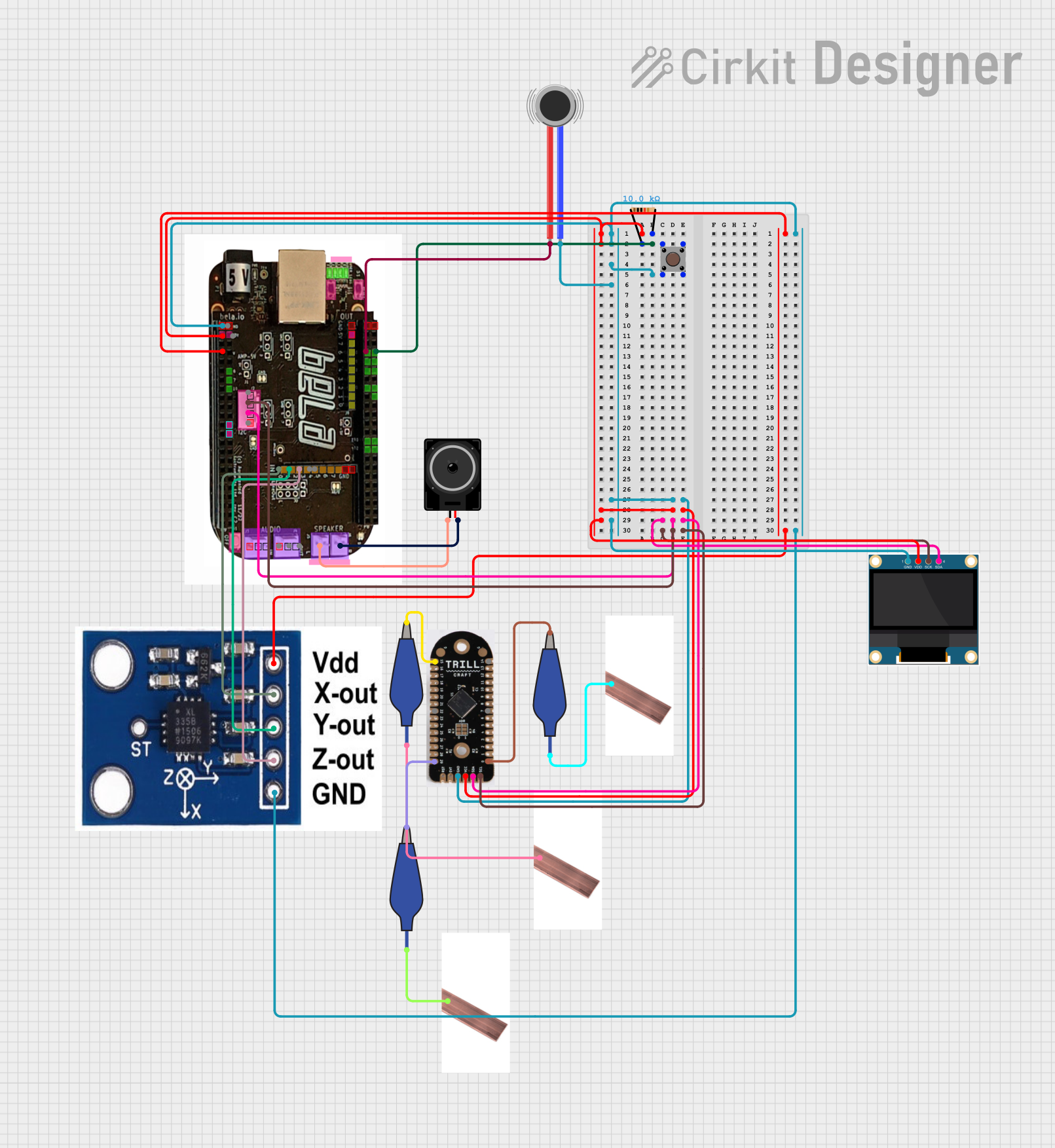
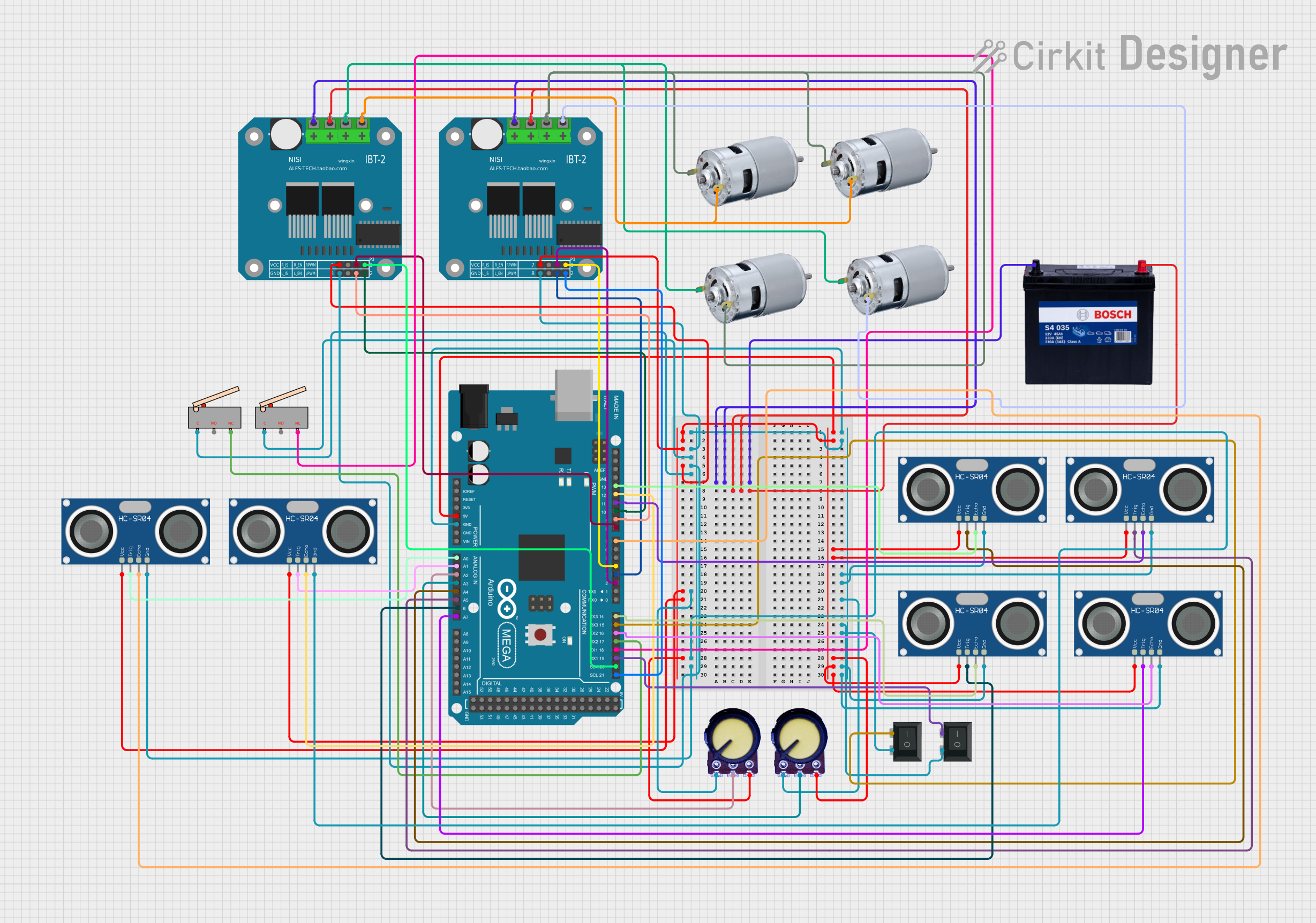
Explore Projects Built with ULTASONIC
Common Applications and Use Cases
- Obstacle detection in robotics
- Distance measurement in automation systems
- Liquid level sensing in tanks
- Parking assistance systems in vehicles
- Proximity detection in security systems
Technical Specifications
Below are the key technical details for a typical ultrasonic sensor (e.g., HC-SR04):
| Parameter | Value |
|---|---|
| Operating Voltage | 5V DC |
| Operating Current | 15 mA |
| Operating Frequency | 40 kHz |
| Measuring Range | 2 cm to 400 cm |
| Accuracy | ±3 mm |
| Trigger Input Signal | 10 µs TTL pulse |
| Echo Output Signal | Pulse width proportional to range |
| Dimensions | 45 mm x 20 mm x 15 mm |
Pin Configuration and Descriptions
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Connect to 5V DC power supply. |
| 2 | Trig | Trigger pin. Send a 10 µs HIGH pulse to initiate distance measurement. |
| 3 | Echo | Echo pin. Outputs a pulse whose width corresponds to the measured distance. |
| 4 | GND | Ground pin. Connect to the ground of the power supply. |
Usage Instructions
How to Use the Ultrasonic Sensor in a Circuit
- Power the Sensor: Connect the VCC pin to a 5V power supply and the GND pin to ground.
- Trigger the Sensor: Send a 10 µs HIGH pulse to the Trig pin to start the measurement process.
- Read the Echo: Measure the duration of the HIGH pulse on the Echo pin. This duration is proportional to the distance of the object.
- Calculate Distance: Use the formula below to calculate the distance: [ \text{Distance (cm)} = \frac{\text{Pulse Duration (µs)}}{58} ] Alternatively, for distance in inches: [ \text{Distance (in)} = \frac{\text{Pulse Duration (µs)}}{148} ]
Important Considerations and Best Practices
- Ensure the sensor is mounted securely and aligned properly for accurate measurements.
- Avoid placing the sensor near ultrasonic noise sources, as this can interfere with its operation.
- Use a capacitor (e.g., 10 µF) across the VCC and GND pins to stabilize the power supply.
- The sensor may not work reliably for very small or highly absorbent objects.
Example Code for Arduino UNO
Below is an example of how to use the ultrasonic sensor with an Arduino UNO:
// Define pins for the ultrasonic sensor
const int trigPin = 9; // Trigger pin connected to digital pin 9
const int echoPin = 10; // Echo pin connected to digital pin 10
void setup() {
// Initialize serial communication for debugging
Serial.begin(9600);
// Set pin modes
pinMode(trigPin, OUTPUT); // Trig pin as output
pinMode(echoPin, INPUT); // Echo pin as input
}
void loop() {
// Send a 10 µs HIGH pulse to the Trig pin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Measure the duration of the HIGH pulse on the Echo pin
long duration = pulseIn(echoPin, HIGH);
// Calculate the distance in centimeters
float distance = duration / 58.0;
// Print the distance to the Serial Monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Wait before the next measurement
delay(500);
}
Troubleshooting and FAQs
Common Issues and Solutions
No Output or Incorrect Readings:
- Ensure the sensor is powered with 5V and properly grounded.
- Verify the Trig and Echo pins are connected to the correct Arduino pins.
- Check for loose or faulty wiring.
Unstable or Fluctuating Measurements:
- Add a capacitor (e.g., 10 µF) across the VCC and GND pins to filter noise.
- Ensure there are no obstructions or reflective surfaces near the sensor.
Sensor Not Detecting Objects:
- Ensure the object is within the sensor's range (2 cm to 400 cm).
- Check if the object is too small or made of a material that absorbs sound waves.
FAQs
Q: Can the ultrasonic sensor detect transparent objects?
A: Yes, as long as the object reflects sound waves. However, highly absorbent materials may not be detected.
Q: What is the maximum distance the sensor can measure?
A: The maximum range is typically 400 cm, but this may vary depending on environmental conditions.
Q: Can I use the sensor with a 3.3V microcontroller?
A: The sensor is designed for 5V operation. Use a level shifter or voltage divider for compatibility with 3.3V systems.