How to Use F722 FC: Examples, Pinouts, and Specs
Introduction
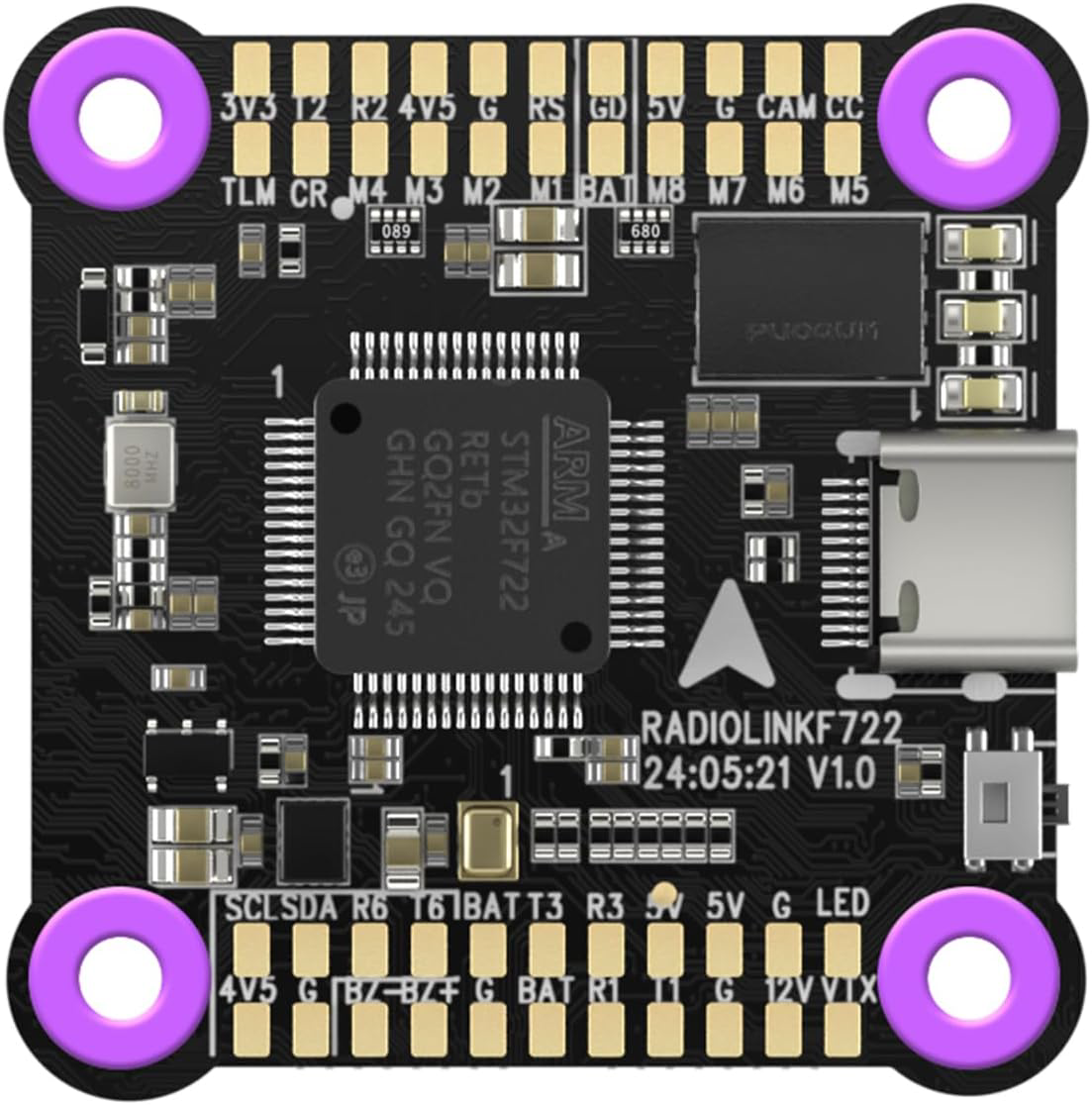
The F722 FC, manufactured by Radiolink, is a high-performance flight controller designed specifically for multirotors and drones. It features advanced stabilization algorithms, multiple sensor inputs, and support for various communication protocols. This makes it an excellent choice for both hobbyist and professional drone applications. The F722 FC is engineered to provide precise control, reliable performance, and seamless integration with other drone components.
Explore Projects Built with F722 FC

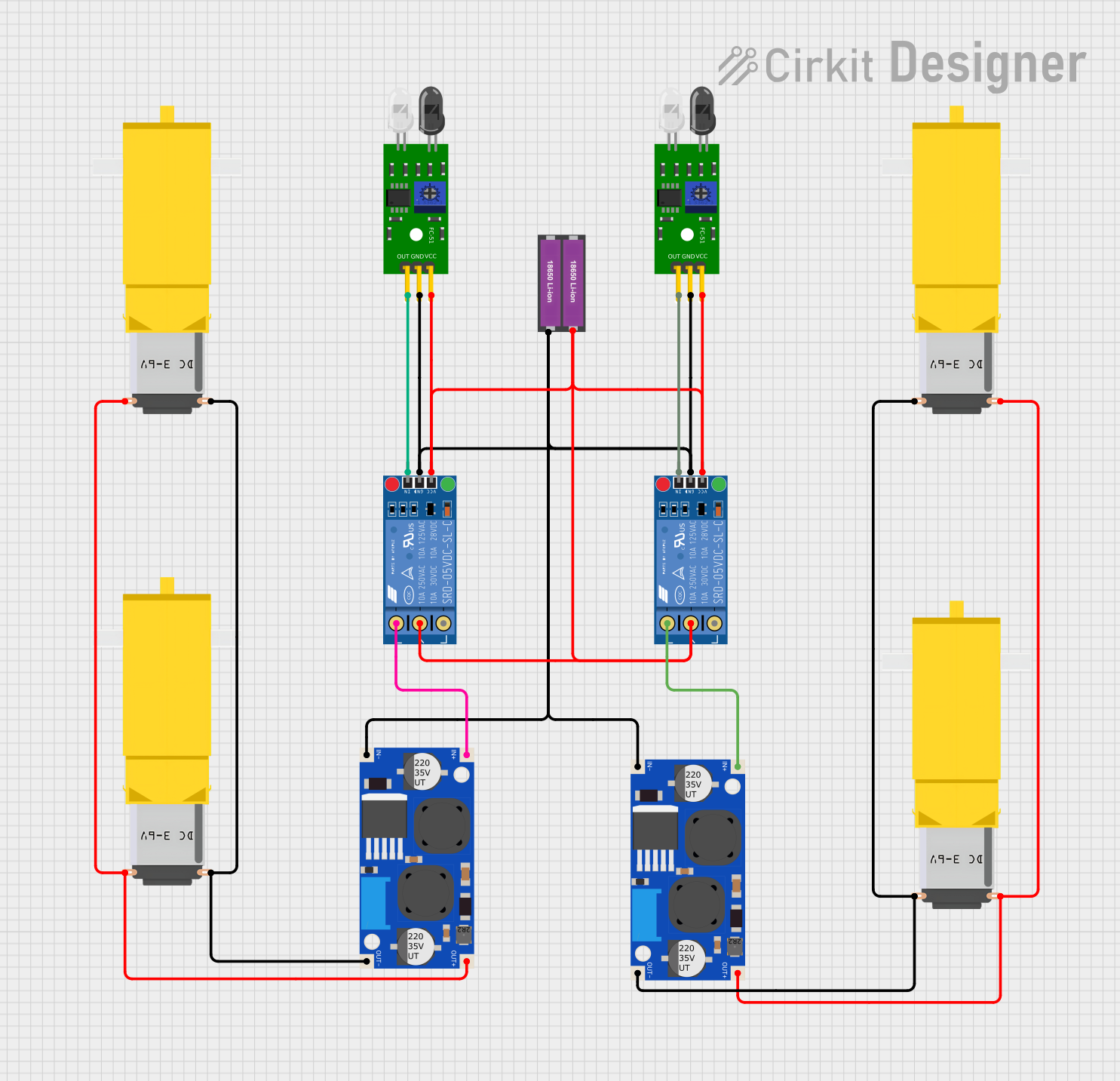
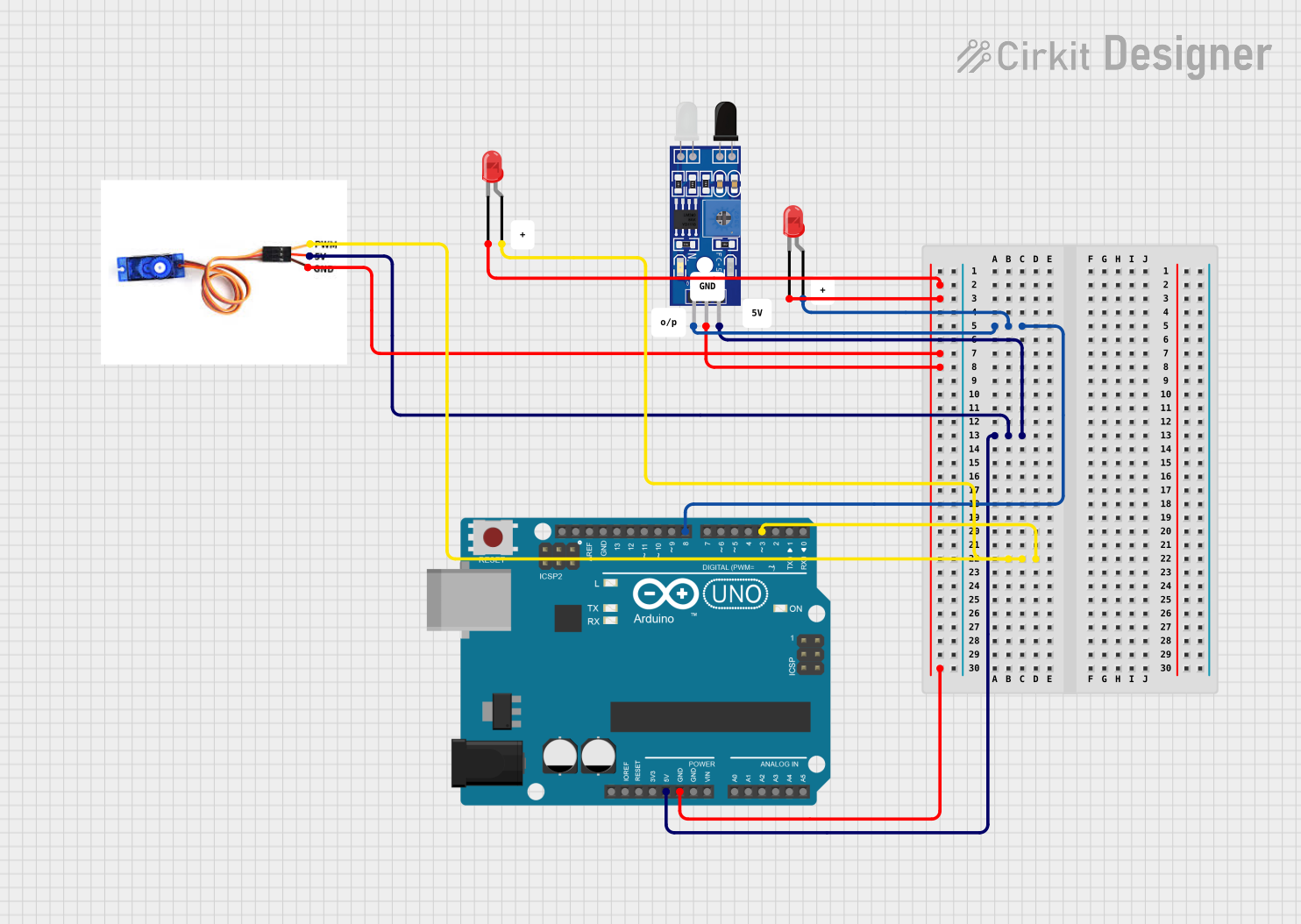
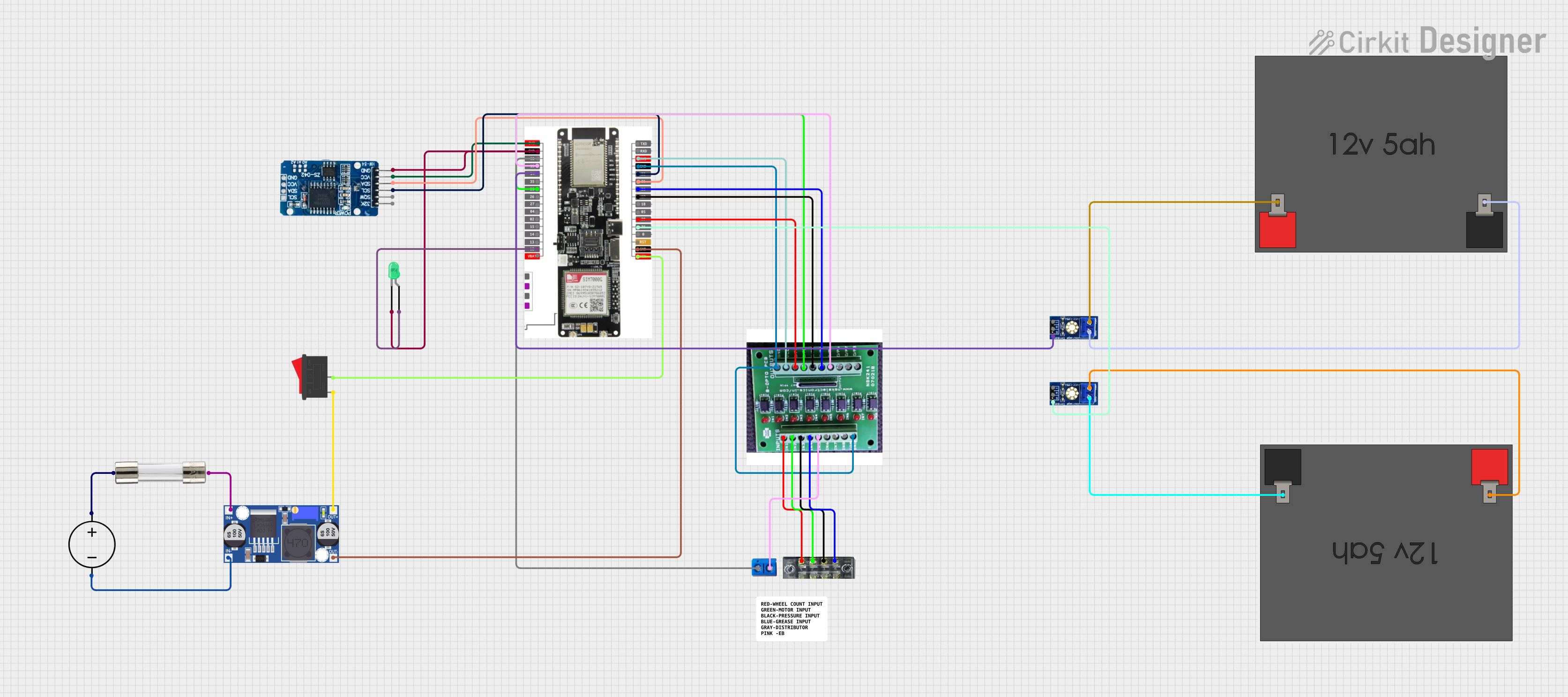
Explore Projects Built with F722 FC
Common Applications and Use Cases
- Multirotor drones for aerial photography and videography
- Racing drones requiring high-speed stabilization
- Autonomous drones for research and development
- Industrial drones for inspection and surveying
- Educational projects involving UAV (Unmanned Aerial Vehicle) systems
Technical Specifications
The F722 FC is packed with features that ensure optimal performance for a wide range of drone applications. Below are its key technical specifications:
Key Technical Details
- Processor: STM32F722RET6 (32-bit ARM Cortex-M7, 216 MHz)
- IMU (Inertial Measurement Unit): MPU6000 (6-axis gyro and accelerometer)
- Input Voltage: 2S–6S LiPo (7.4V–25.2V)
- BEC Output: 5V/2A
- UART Ports: 5 UARTs for peripherals (e.g., GPS, telemetry, receivers)
- I2C Ports: 1 I2C port for external sensors
- Flash Memory: 16 MB for blackbox logging
- OSD (On-Screen Display): Integrated Betaflight OSD
- Communication Protocols: SBUS, DSMX, CRSF, iBUS, and more
- Dimensions: 36 mm x 36 mm (30.5 mm x 30.5 mm mounting holes)
- Weight: 7.5 g
Pin Configuration and Descriptions
The F722 FC features a well-labeled pinout for easy connection to other components. Below is the pin configuration:
| Pin Name | Description |
|---|---|
| GND | Ground connection for power and signal reference |
| VBAT | Battery voltage input (2S–6S LiPo) |
| 5V | 5V output for powering peripherals |
| 3.3V | 3.3V output for low-power peripherals |
| RX1–RX5 | UART receive pins for connecting peripherals (e.g., GPS, telemetry modules) |
| TX1–TX5 | UART transmit pins for connecting peripherals |
| SCL, SDA | I2C pins for external sensors |
| M1–M8 | Motor signal outputs for ESCs (Electronic Speed Controllers) |
| LED | Addressable LED signal output |
| Buzzer | Buzzer signal output for audio feedback |
| RSSI | Analog RSSI input for receiver signal strength monitoring |
| Current | Current sensor input for monitoring power consumption |
Usage Instructions
The F722 FC is designed to be user-friendly, but proper setup is essential for optimal performance. Follow the steps below to integrate the F722 FC into your drone:
Step 1: Wiring the Flight Controller
- Power Supply: Connect the VBAT pin to the positive terminal of your LiPo battery and GND to the negative terminal.
- ESC Connections: Connect the motor signal outputs (M1–M8) to the signal wires of your ESCs.
- Receiver: Connect your receiver to the appropriate UART pins (e.g., RX1/TX1) based on the communication protocol (e.g., SBUS, CRSF).
- Peripherals: Attach additional peripherals such as GPS, telemetry modules, or external sensors to the available UART or I2C ports.
- Buzzer and LEDs: Connect a buzzer and addressable LEDs to their respective pins for audio and visual feedback.
Step 2: Configuring the Flight Controller
- Download and install the Betaflight Configurator software on your computer.
- Connect the F722 FC to your computer using a micro-USB cable.
- Open Betaflight Configurator and select the correct COM port for the flight controller.
- Flash the latest firmware compatible with the F722 FC.
- Configure the following settings:
- Receiver Protocol: Set the protocol to match your receiver (e.g., SBUS, CRSF).
- Motor Mapping: Verify motor order and direction using the motor tab.
- PID Tuning: Adjust PID values for optimal stabilization.
- Failsafe Settings: Configure failsafe behavior in case of signal loss.
Step 3: Testing and Calibration
- Calibrate the accelerometer and gyro using Betaflight Configurator.
- Test motor functionality and ensure proper rotation direction.
- Perform a range test with your transmitter and receiver.
- Verify that all peripherals (e.g., GPS, telemetry) are functioning correctly.
Arduino UNO Integration
While the F722 FC is not typically used with an Arduino UNO, it is possible to interface the two for custom applications. For example, you can use the Arduino UNO to send commands to the F722 FC via a UART connection. Below is a sample Arduino code snippet for sending data to the F722 FC:
#include <SoftwareSerial.h>
// Define RX and TX pins for SoftwareSerial
SoftwareSerial mySerial(10, 11); // RX = pin 10, TX = pin 11
void setup() {
// Initialize serial communication
Serial.begin(9600); // For debugging
mySerial.begin(115200); // Communication with F722 FC
Serial.println("Arduino to F722 FC communication initialized.");
}
void loop() {
// Example: Send a test command to the F722 FC
mySerial.println("Test Command");
// Check for response from F722 FC
if (mySerial.available()) {
String response = mySerial.readString();
Serial.println("F722 FC Response: " + response);
}
delay(1000); // Wait 1 second before sending the next command
}
Important Considerations and Best Practices
- Ensure that the F722 FC is securely mounted to minimize vibrations.
- Use a capacitor on the power input to reduce electrical noise.
- Always check for firmware updates to ensure compatibility with new features.
- Avoid powering high-current peripherals directly from the flight controller's 5V output.
Troubleshooting and FAQs
Common Issues and Solutions
Issue: The flight controller is not detected by Betaflight Configurator.
- Solution: Ensure the correct USB drivers are installed. Try a different USB cable or port.
Issue: Motors are not spinning or spinning in the wrong direction.
- Solution: Verify motor connections and remap motor outputs in Betaflight Configurator. Use the motor tab to test and reverse motor direction if necessary.
Issue: The drone is unstable during flight.
- Solution: Check PID tuning and calibrate the accelerometer and gyro. Ensure the propellers are balanced and installed correctly.
Issue: GPS or telemetry module is not working.
- Solution: Verify UART port configuration and ensure the correct baud rate is set in Betaflight Configurator.
FAQs
Q: Can the F722 FC handle 8 motors for an octocopter setup?
A: Yes, the F722 FC supports up to 8 motor outputs, making it suitable for octocopters.Q: Does the F722 FC support BLHeli_32 ESCs?
A: Yes, the F722 FC is compatible with BLHeli_32 ESCs and supports DShot protocols.Q: Can I use the F722 FC with iNAV firmware?
A: Yes, the F722 FC is compatible with iNAV firmware for advanced navigation features.Q: What is the maximum input voltage for the F722 FC?
A: The F722 FC supports a maximum input voltage of 25.2V (6S LiPo).
By following this documentation, users can effectively integrate and operate the Radiolink F722 FC in their drone projects.