How to Use SparkFun 9DoF Razor IMU: Examples, Pinouts, and Specs
Introduction
The SparkFun 9DoF Razor IMU is an integrated motion sensing module that combines a 3-axis accelerometer, a 3-axis gyroscope, and a 3-axis magnetometer. This allows for precise tracking of rotational and translational movements. The Razor IMU is ideal for applications in robotics, motion analysis, and orientation tracking.
Explore Projects Built with SparkFun 9DoF Razor IMU


Explore Projects Built with SparkFun 9DoF Razor IMU
Technical Specifications
Key Technical Details
- Accelerometer Range: ±2/±4/±8/±16g
- Gyroscope Range: ±250/±500/±1000/±2000°/sec
- Magnetometer Range: ±4800µT
- Operating Voltage: 3.3V to 5V
- Communication: I2C/SPI
- Dimensions: 35 x 30 mm
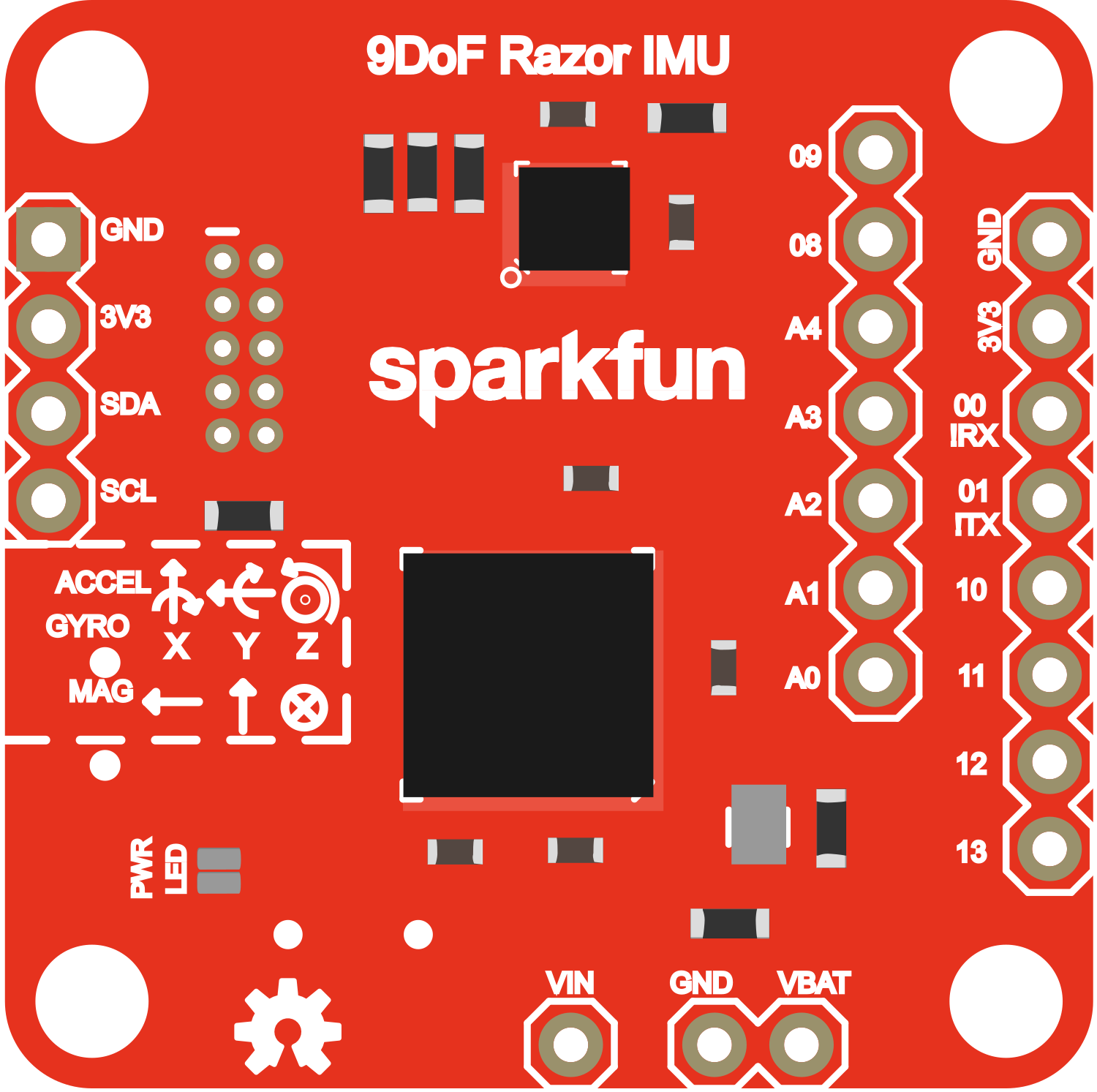
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | GND | Ground connection |
| 2 | VCC | Power supply (3.3V-5V) |
| 3 | SDA | I2C Data Line |
| 4 | SCL | I2C Clock Line |
| 5 | RXI | UART Receive Pin |
| 6 | TXO | UART Transmit Pin |
| 7 | SPC | SPI Clock Line |
| 8 | SDO | SPI Data Output |
| 9 | SDI | SPI Data Input |
| 10 | CS | SPI Chip Select |
Usage Instructions
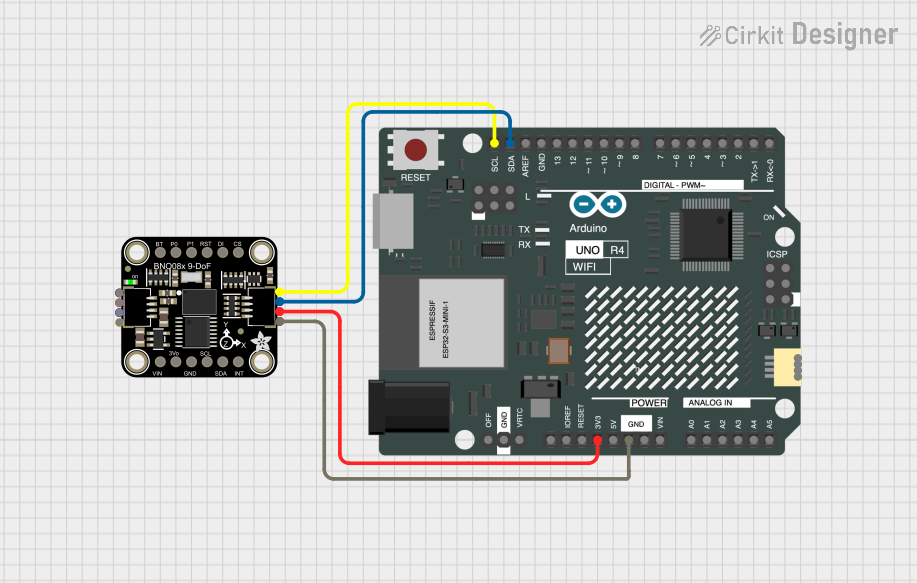
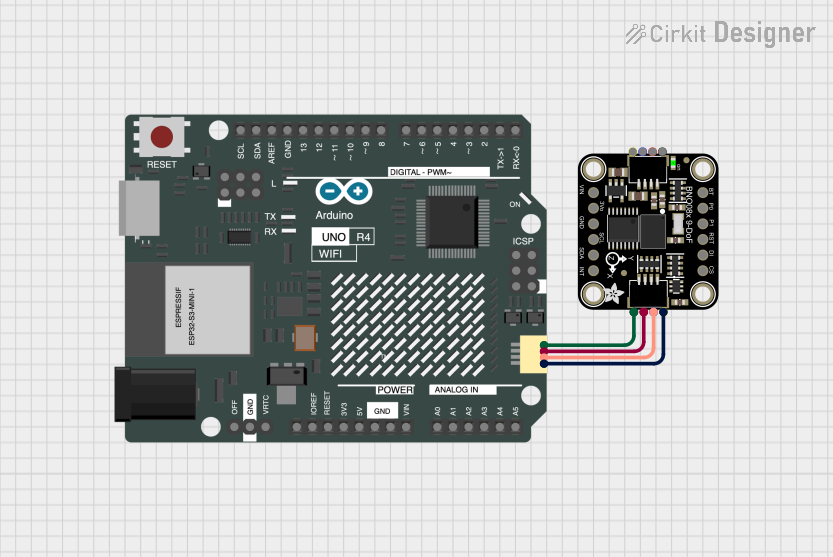
Integration with a Circuit
- Powering the Module: Connect the VCC pin to a 3.3V or 5V power supply and the GND pin to the ground.
- Communication Setup: Choose between I2C or SPI for communication and connect the respective pins to your microcontroller.
- Mounting: Secure the module to your application, ensuring it is firmly in place to avoid erroneous readings due to vibrations.
Best Practices
- Calibration: Calibrate the magnetometer to account for any magnetic distortions specific to your environment.
- Orientation: Mount the IMU in a stable orientation where it is less likely to experience sudden jolts or movements.
- Code Libraries: Utilize existing libraries and code examples to expedite development.
Example Code for Arduino UNO
#include <Wire.h> // Include the I2C library (required)
// Razor IMU I2C address (default)
#define RAZOR_IMU_ADDR 0x68
void setup() {
Wire.begin(); // Initialize I2C
Serial.begin(9600); // Start serial communication at 9600 baud
}
void loop() {
// Code to communicate with the Razor IMU and read sensor data
// This is a placeholder for actual implementation
Serial.println("Reading sensor data...");
delay(1000); // Delay for demonstration purposes
}
Troubleshooting and FAQs
Common Issues
- No Data Output: Ensure that the power supply is correctly connected and within the specified voltage range. Check the wiring of the I2C/SPI lines.
- Inaccurate Readings: Verify that the IMU is properly calibrated and mounted securely to prevent false readings due to mechanical noise.
Solutions and Tips
- Calibration: Perform a calibration routine at the start of your application to ensure accurate readings.
- Firmware Updates: Keep the IMU firmware up to date to benefit from the latest improvements and bug fixes.
FAQs
Q: Can the Razor IMU be used with a 5V system? A: Yes, the IMU can be powered with a 5V supply, but ensure that the logic levels are compatible.
Q: How do I calibrate the magnetometer? A: Calibration typically involves rotating the IMU in various orientations and using software tools to compute offsets and scaling factors.
Q: What is the default communication protocol? A: The IMU supports both I2C and SPI, but I2C is commonly used and is the default in many code examples.
For further assistance, consult the SparkFun 9DoF Razor IMU forums and community resources.