How to Use HLTNC IG57 Stepper motor: Examples, Pinouts, and Specs

Introduction
The HLTNC IG57 Stepper Motor is a high-precision electric motor designed to divide a full rotation into a large number of discrete steps. This feature allows for precise control of both position and speed, making it an ideal choice for applications requiring accurate and repeatable motion. The IG57 stepper motor is widely used in industries such as 3D printing, CNC machining, robotics, and automation systems.
Explore Projects Built with HLTNC IG57 Stepper motor
Explore Projects Built with HLTNC IG57 Stepper motor
Common Applications
- 3D Printers: For precise layer-by-layer positioning of the print head or bed.
- CNC Machines: To control the movement of cutting tools with high accuracy.
- Robotics: For precise joint or wheel movement in robotic systems.
- Automation Systems: In conveyor belts, pick-and-place machines, and other automated equipment.
Technical Specifications
The following table outlines the key technical specifications of the HLTNC IG57 Stepper Motor:
| Parameter | Value |
|---|---|
| Step Angle | 1.8° |
| Holding Torque | 2.5 Nm |
| Rated Voltage | 3.2 V |
| Rated Current | 2.8 A/phase |
| Resistance per Phase | 1.14 Ω |
| Inductance per Phase | 3.2 mH |
| Number of Phases | 2 |
| Shaft Diameter | 8 mm |
| Motor Dimensions | 57 mm x 57 mm x 76 mm |
| Weight | 1.2 kg |
Pin Configuration
The HLTNC IG57 Stepper Motor typically has four wires for bipolar operation. The pin configuration is as follows:
| Wire Color | Function | Description |
|---|---|---|
| Red | Coil A+ | Positive terminal of Coil A |
| Blue | Coil A- | Negative terminal of Coil A |
| Green | Coil B+ | Positive terminal of Coil B |
| Black | Coil B- | Negative terminal of Coil B |
Usage Instructions
How to Use the HLTNC IG57 Stepper Motor in a Circuit
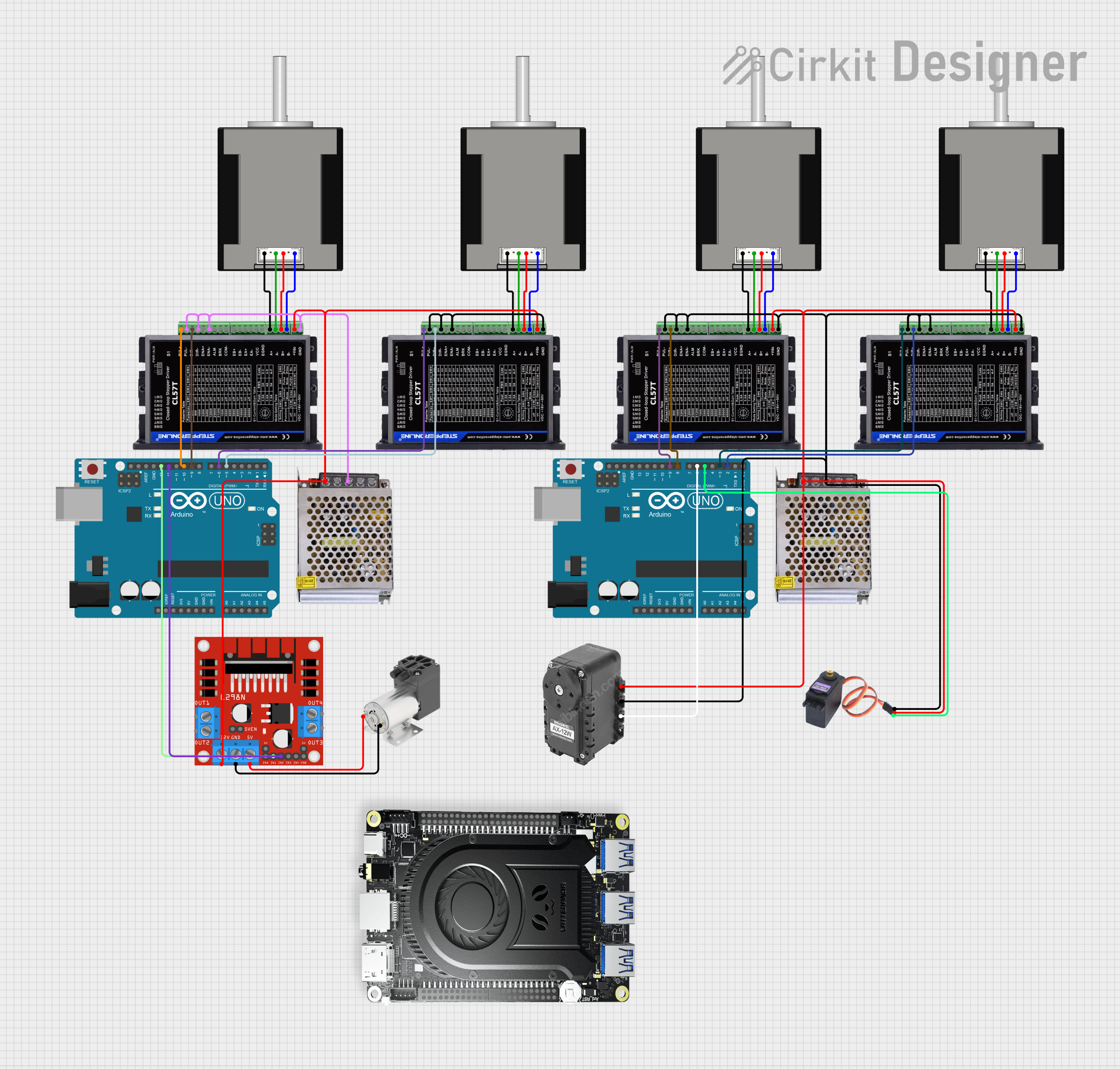
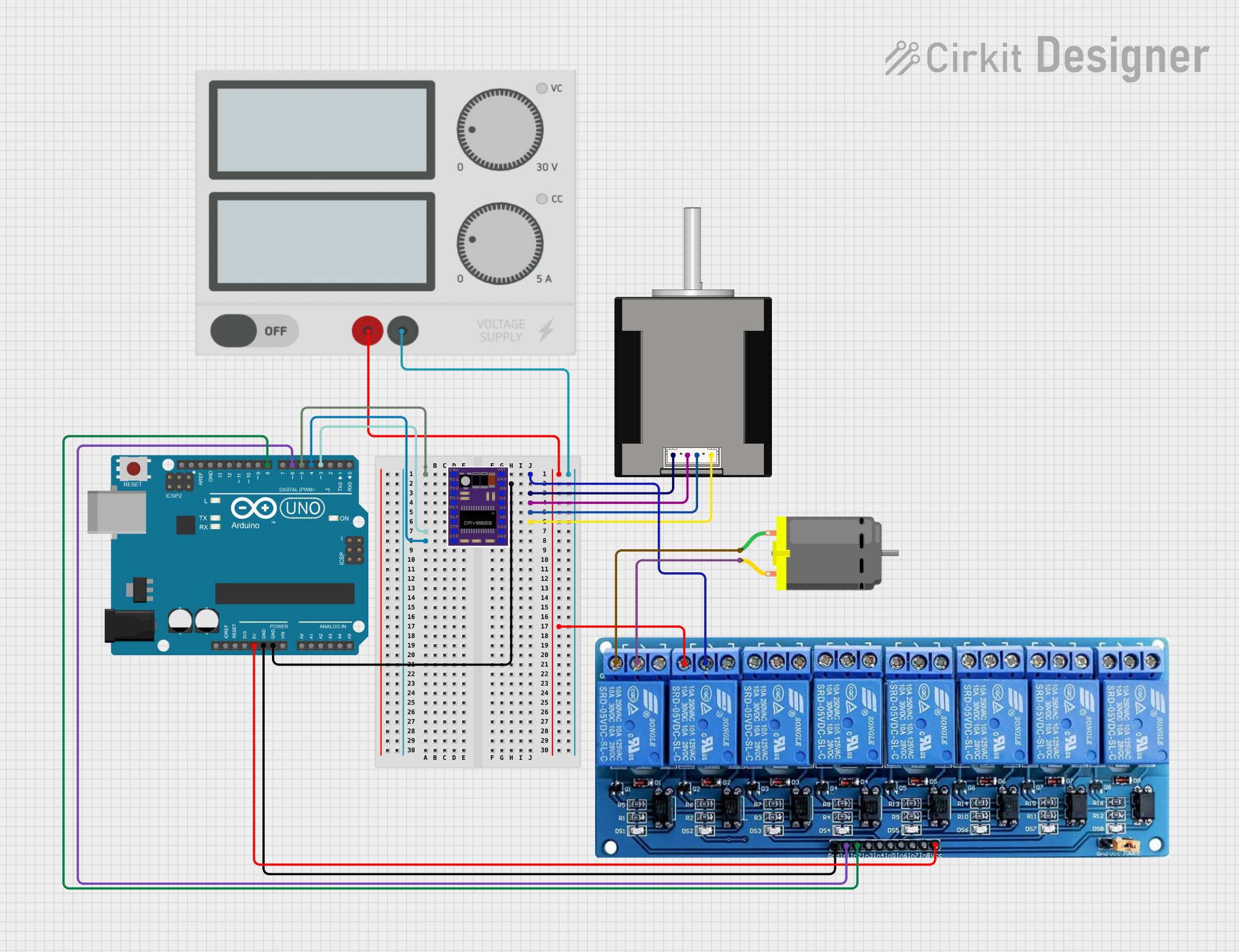
- Power Supply: Ensure the motor is powered by a suitable power supply that matches its rated voltage and current. A stepper motor driver is required to control the motor.
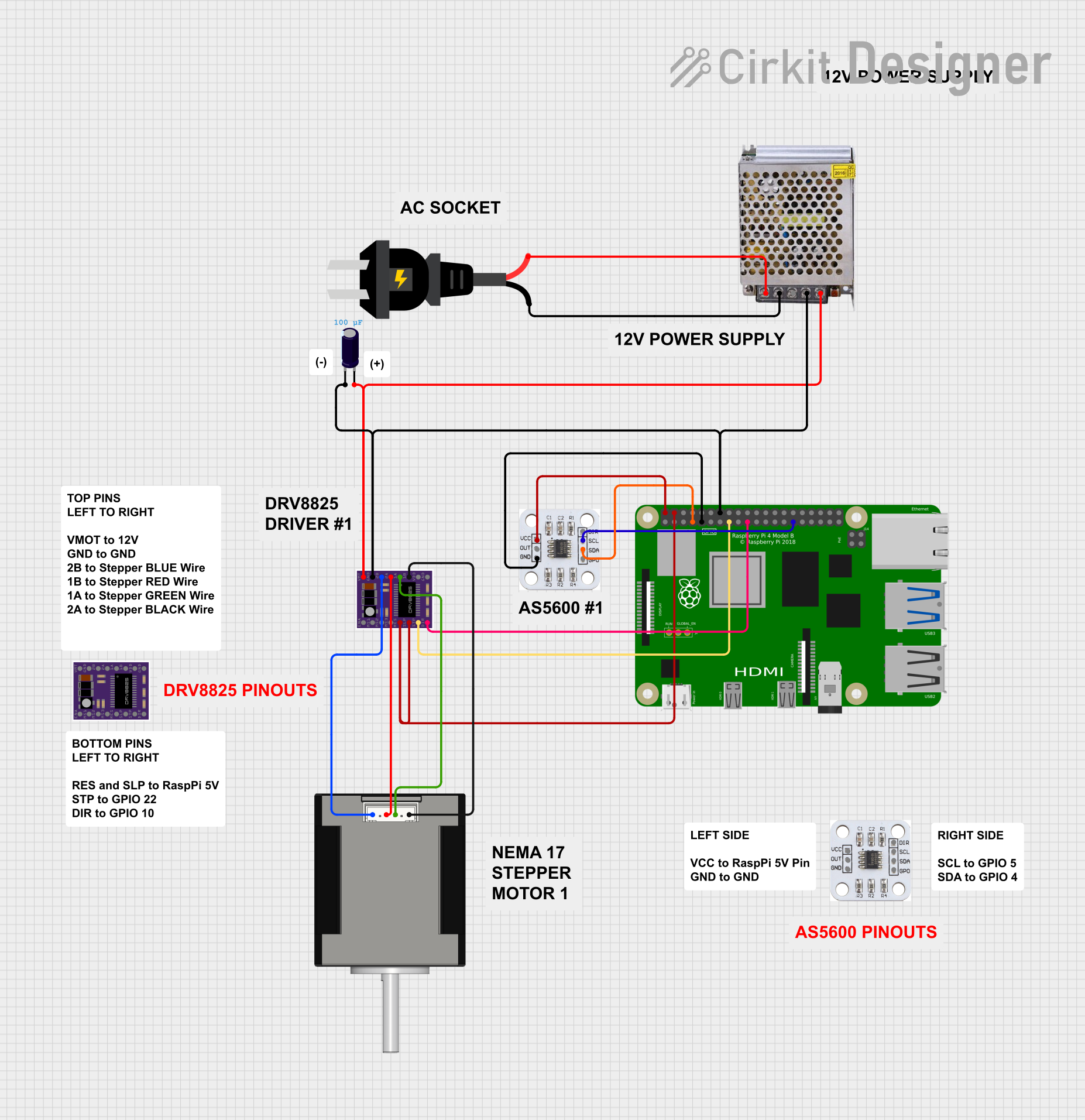
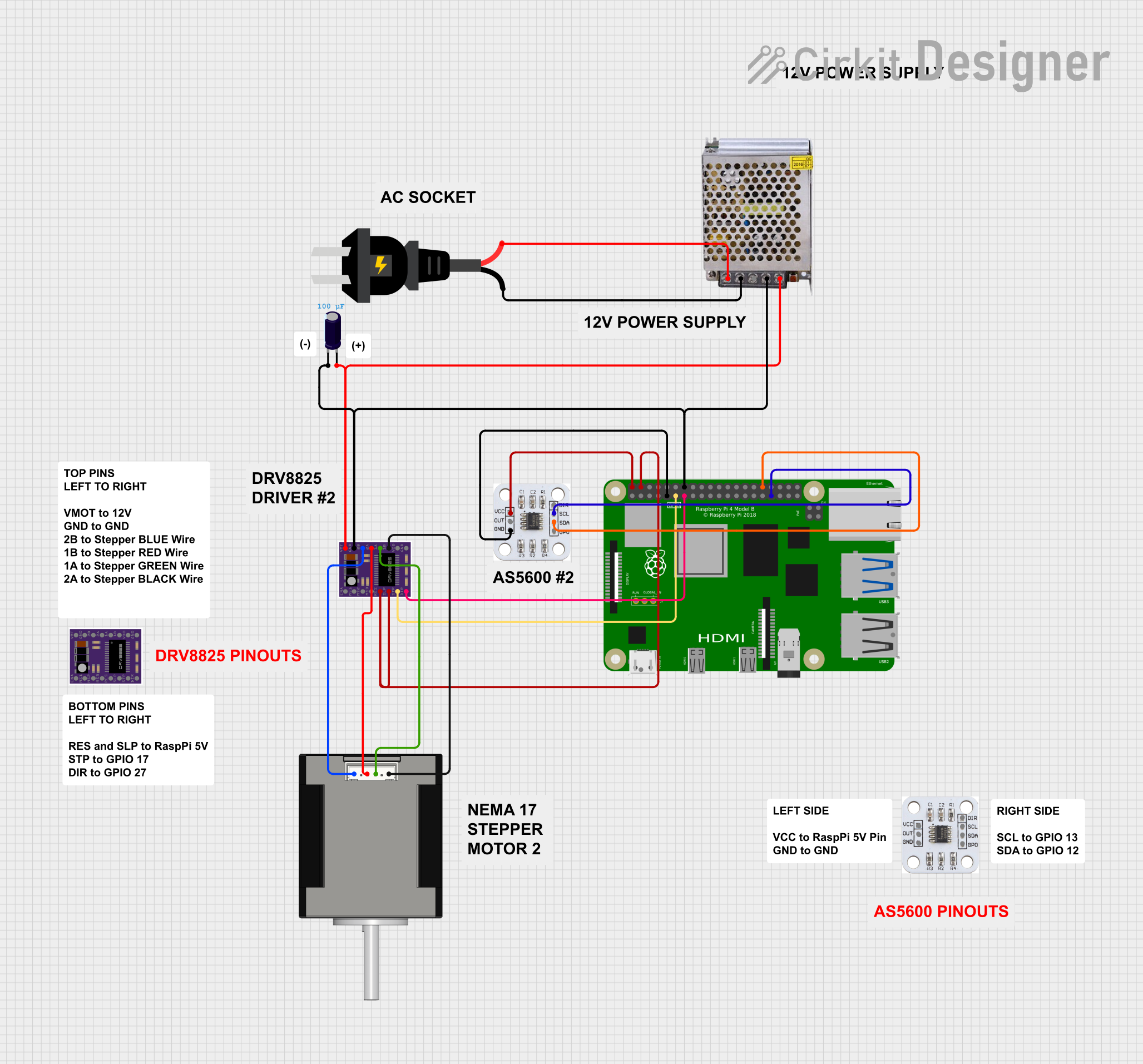
- Driver Connection: Connect the motor wires to a compatible stepper motor driver. For example, the A4988 or DRV8825 driver can be used.
- Microcontroller Interface: Use a microcontroller (e.g., Arduino UNO) to send step and direction signals to the driver.
- Step Angle Control: Adjust the step angle by configuring the microstepping settings on the driver.
- Heat Management: Ensure proper heat dissipation for the motor and driver to prevent overheating.
Important Considerations
- Current Limiting: Set the current limit on the driver to match the motor's rated current (2.8 A/phase) to avoid damage.
- Wiring: Double-check the wiring to ensure the coils are connected correctly. Incorrect wiring can cause erratic behavior or damage.
- Microstepping: Use microstepping to achieve smoother motion and higher resolution.
- Load: Avoid exceeding the motor's holding torque to prevent missed steps.
Example Code for Arduino UNO
Below is an example of how to control the HLTNC IG57 Stepper Motor using an Arduino UNO and an A4988 driver:
// Include the Stepper library for easy motor control
#include <Stepper.h>
// Define the number of steps per revolution for the motor
#define STEPS_PER_REV 200 // 1.8° step angle = 200 steps per revolution
// Initialize the Stepper library with the motor's steps and pin connections
Stepper stepper(STEPS_PER_REV, 8, 9, 10, 11);
// Pins 8, 9, 10, 11 are connected to the A4988 driver
void setup() {
// Set the motor speed (in RPM)
stepper.setSpeed(60); // 60 RPM
Serial.begin(9600);
Serial.println("Stepper Motor Test");
}
void loop() {
// Rotate the motor one full revolution clockwise
Serial.println("Rotating clockwise...");
stepper.step(STEPS_PER_REV);
delay(1000); // Wait for 1 second
// Rotate the motor one full revolution counterclockwise
Serial.println("Rotating counterclockwise...");
stepper.step(-STEPS_PER_REV);
delay(1000); // Wait for 1 second
}
Notes on the Code
- Replace pins
8, 9, 10, 11with the actual pins connected to your driver. - Adjust the speed (
setSpeed) and steps (step) as needed for your application.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Verify the wiring matches the pin configuration table. Ensure the power supply meets the motor's voltage and current requirements.
Motor Vibrates but Does Not Rotate
- Cause: Incorrect coil connections.
- Solution: Check the wire pairs for each coil using a multimeter. Ensure the correct pairing is connected to the driver.
Overheating
- Cause: Current limit set too high on the driver.
- Solution: Adjust the current limit to match the motor's rated current (2.8 A/phase).
Missed Steps
- Cause: Excessive load or insufficient torque.
- Solution: Reduce the load or increase the torque by adjusting the driver settings or using microstepping.
Noisy Operation
- Cause: Low microstepping resolution.
- Solution: Increase the microstepping resolution on the driver for smoother and quieter operation.
FAQs
Q: Can I use the HLTNC IG57 Stepper Motor with a unipolar driver?
A: No, the IG57 is a bipolar stepper motor and requires a bipolar driver.Q: What is the maximum speed of the motor?
A: The maximum speed depends on the driver and power supply but is typically around 1000 RPM under no load.Q: Can I run the motor without a driver?
A: No, a stepper motor driver is required to control the motor's steps and direction.Q: How do I identify the coil pairs?
A: Use a multimeter to measure resistance. The two wires with measurable resistance belong to the same coil.
This concludes the documentation for the HLTNC IG57 Stepper Motor. For further assistance, refer to the manufacturer's datasheet or contact technical support.