How to Use TB661 2FNG Motor Drive: Examples, Pinouts, and Specs
Introduction
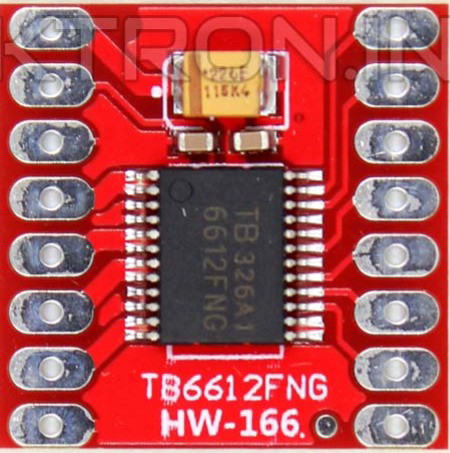
The TB6612FNG is a dual H-bridge motor driver IC designed for controlling DC motors and stepper motors. It is capable of driving motors with high efficiency and includes built-in features such as thermal shutdown, overcurrent protection, and low standby current. This makes it an excellent choice for robotics, automation, and other motor control applications.
Explore Projects Built with TB661 2FNG Motor Drive
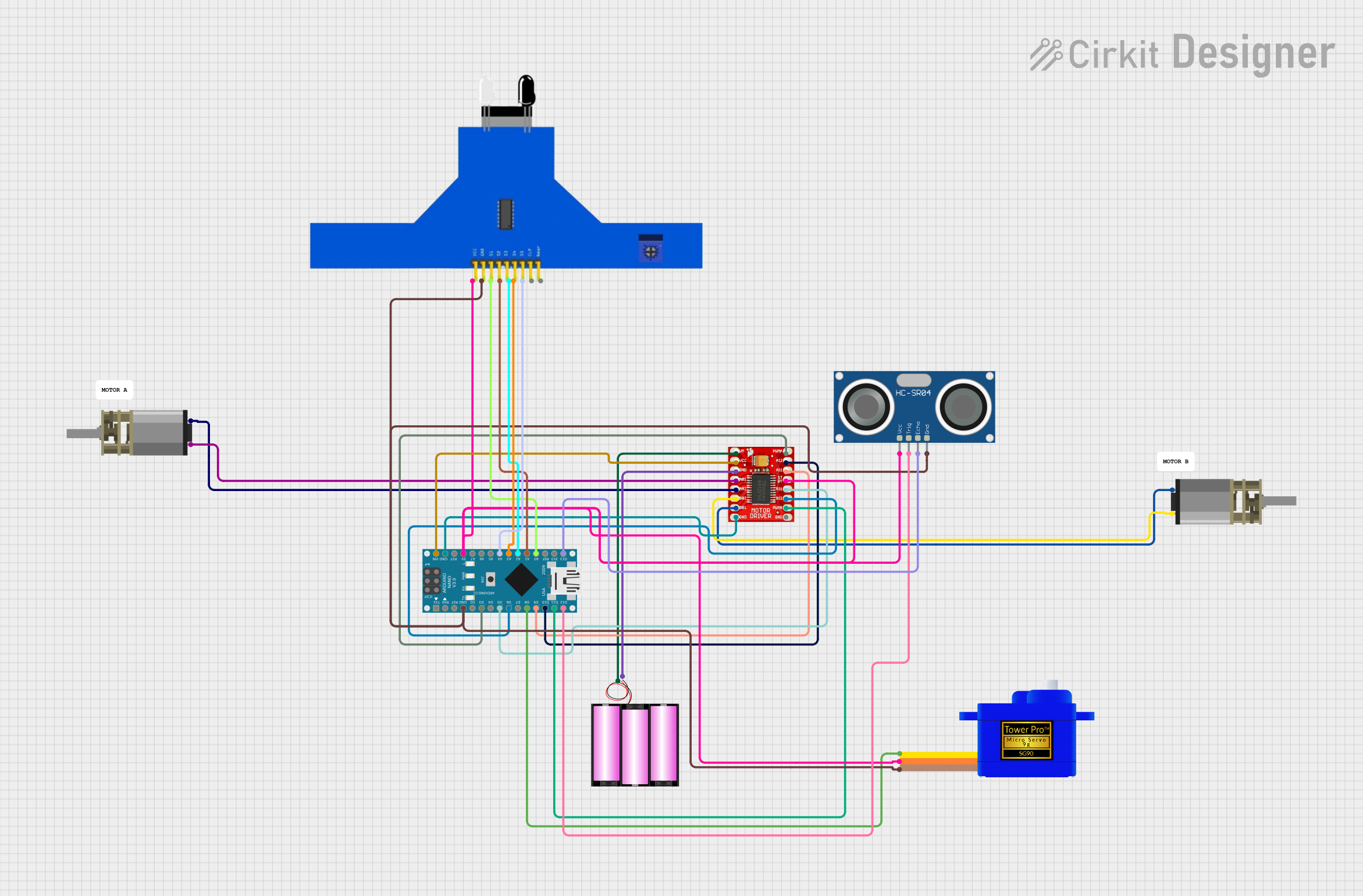
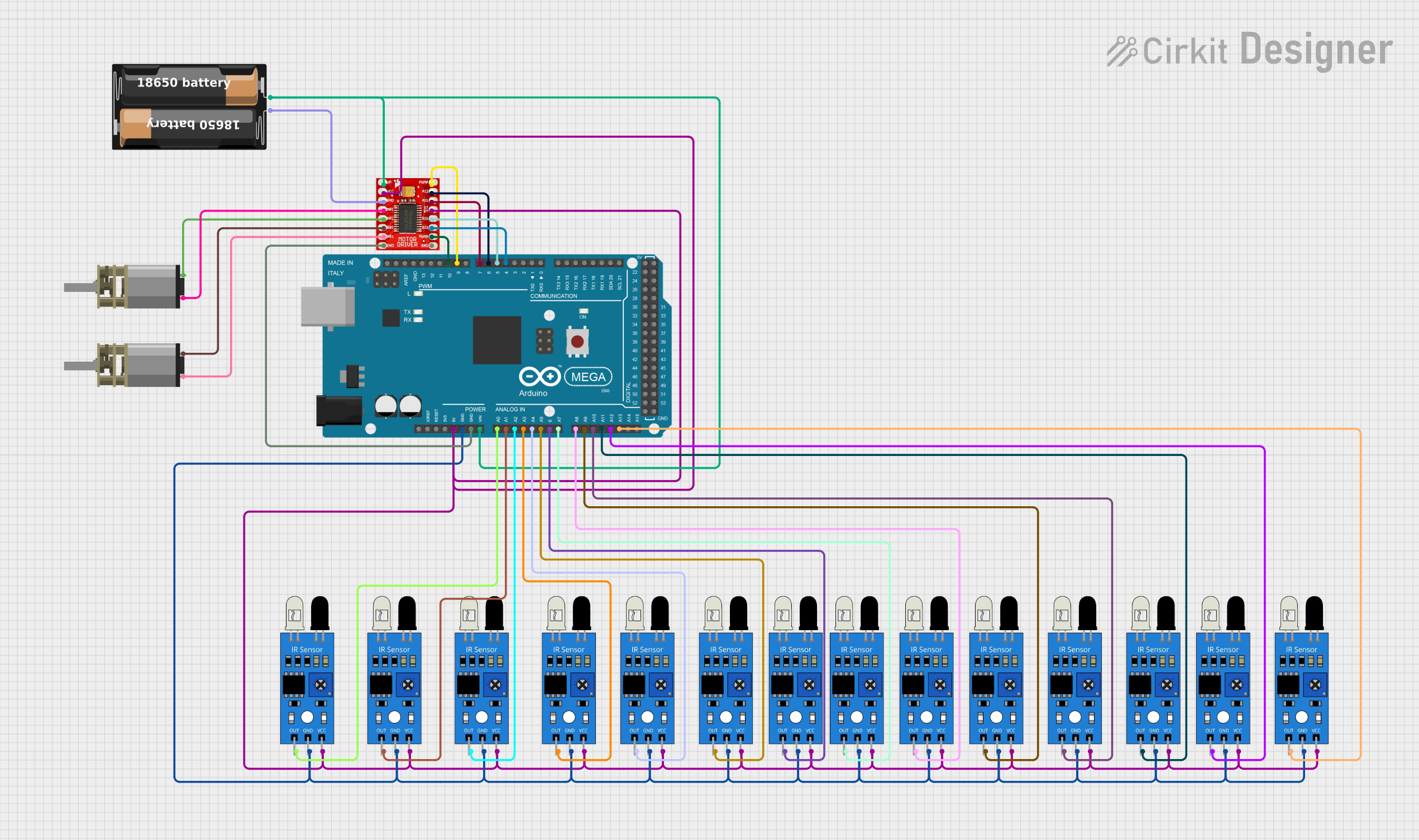
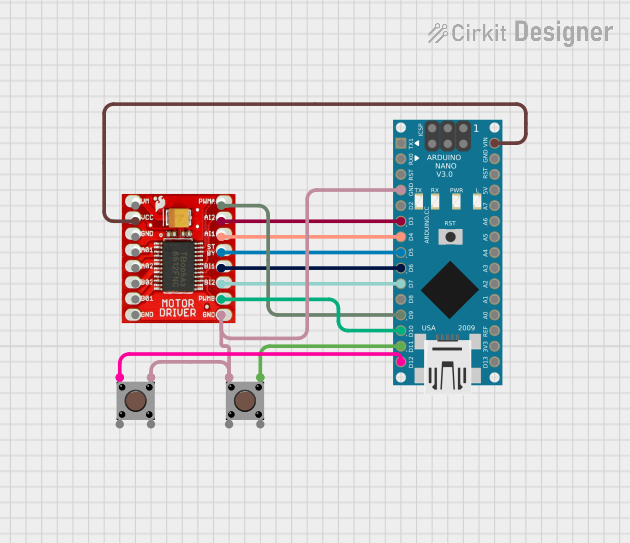
Explore Projects Built with TB661 2FNG Motor Drive
Common Applications and Use Cases
- Robotics: Driving wheels or actuators in robotic systems
- Automation: Controlling conveyor belts or other motorized mechanisms
- DIY Projects: Motorized toys, RC vehicles, and hobbyist electronics
- Stepper Motor Control: Driving stepper motors in CNC machines or 3D printers
Technical Specifications
The TB6612FNG is a versatile motor driver with the following key specifications:
| Parameter | Value |
|---|---|
| Operating Voltage (Vcc) | 2.7V to 5.5V |
| Motor Voltage (VM) | 4.5V to 13.5V |
| Output Current (per channel) | 1.2A (continuous), 3.2A (peak) |
| Standby Current | 1 µA (typical) |
| Control Logic | PWM (Pulse Width Modulation) |
| Built-in Protections | Thermal shutdown, overcurrent, and undervoltage lockout |
| Operating Temperature Range | -20°C to +85°C |
| Package Type | HSOP-25 |
Pin Configuration and Descriptions
The TB6612FNG has 16 pins, each serving a specific function. Below is the pinout and description:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | AIN1 | Input signal for Motor A (H-bridge control) |
| 2 | AIN2 | Input signal for Motor A (H-bridge control) |
| 3 | PWMA | PWM input for Motor A |
| 4 | A01 | Output 1 for Motor A |
| 5 | A02 | Output 2 for Motor A |
| 6 | VM | Motor power supply (4.5V to 13.5V) |
| 7 | GND | Ground |
| 8 | STBY | Standby control (active high to enable the IC) |
| 9 | VCC | Logic power supply (2.7V to 5.5V) |
| 10 | BIN1 | Input signal for Motor B (H-bridge control) |
| 11 | BIN2 | Input signal for Motor B (H-bridge control) |
| 12 | PWMB | PWM input for Motor B |
| 13 | B01 | Output 1 for Motor B |
| 14 | B02 | Output 2 for Motor B |
| 15 | NC | No connection |
| 16 | NC | No connection |
Usage Instructions
How to Use the TB6612FNG in a Circuit
Power Connections:
- Connect the
VMpin to the motor power supply (4.5V to 13.5V). - Connect the
VCCpin to the logic power supply (2.7V to 5.5V). - Connect the
GNDpin to the ground of the circuit.
- Connect the
Motor Connections:
- Connect the motor terminals to
A01andA02for Motor A, andB01andB02for Motor B.
- Connect the motor terminals to
Control Signals:
- Use the
AIN1,AIN2, andPWMApins to control Motor A. - Use the
BIN1,BIN2, andPWMBpins to control Motor B. - Apply a PWM signal to the
PWMAandPWMBpins to control motor speed. - Set the
STBYpin high to enable the IC.
- Use the
Logic Table for Motor Control:
- The following table shows how to control the motor direction and braking:
| AIN1/BIN1 | AIN2/BIN2 | Motor Action |
|---|---|---|
| High | Low | Forward Rotation |
| Low | High | Reverse Rotation |
| High | High | Brake (short circuit) |
| Low | Low | Stop (coast) |
Example: Connecting to an Arduino UNO
Below is an example of how to control a DC motor using the TB6612FNG and an Arduino UNO:
Circuit Connections
- Connect
AIN1to Arduino pin 7. - Connect
AIN2to Arduino pin 8. - Connect
PWMAto Arduino pin 9 (PWM pin). - Connect
STBYto Arduino pin 10. - Connect
VMto a 9V motor power supply. - Connect
VCCto the Arduino 5V pin. - Connect
GNDto the Arduino GND pin.
Arduino Code
// Define control pins for Motor A
const int AIN1 = 7; // Motor A direction control pin 1
const int AIN2 = 8; // Motor A direction control pin 2
const int PWMA = 9; // Motor A speed control (PWM) pin
const int STBY = 10; // Standby pin
void setup() {
// Set pin modes
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(STBY, OUTPUT);
// Enable the motor driver by setting STBY high
digitalWrite(STBY, HIGH);
}
void loop() {
// Rotate motor forward
digitalWrite(AIN1, HIGH); // Set direction
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 128); // Set speed (0-255)
delay(2000); // Run for 2 seconds
// Rotate motor backward
digitalWrite(AIN1, LOW); // Reverse direction
digitalWrite(AIN2, HIGH);
analogWrite(PWMA, 128); // Maintain same speed
delay(2000); // Run for 2 seconds
// Stop the motor
digitalWrite(AIN1, LOW); // Stop motor
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 0); // Set speed to 0
delay(2000); // Wait for 2 seconds
}
Important Considerations and Best Practices
- Ensure the motor power supply voltage (
VM) matches the motor's rated voltage. - Use appropriate decoupling capacitors near the
VMandVCCpins to reduce noise. - Avoid exceeding the maximum current rating to prevent damage to the IC.
- Use a heatsink or proper ventilation if operating at high currents for extended periods.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Spinning:
- Ensure the
STBYpin is set high to enable the IC. - Verify that the control signals (
AIN1,AIN2,PWMA) are correctly configured.
- Ensure the
Motor Spins in the Wrong Direction:
- Check the wiring of the motor terminals.
- Reverse the logic levels on
AIN1andAIN2to change the direction.
Overheating:
- Ensure the motor current does not exceed the IC's maximum rating.
- Add a heatsink or improve ventilation around the IC.
No Output Voltage on Motor Pins:
- Verify that the
VMandVCCpower supplies are within the specified range. - Check for any short circuits or loose connections.
- Verify that the
FAQs
Q: Can the TB6612FNG drive stepper motors?
A: Yes, the TB6612FNG can drive stepper motors by controlling the two H-bridges in a coordinated manner. Use a stepper motor library for easier implementation with microcontrollers.
Q: What happens if the IC overheats?
A: The TB6612FNG has a built-in thermal shutdown feature that disables the outputs to protect the IC from damage.
Q: Can I use the TB6612FNG with a 3.3V microcontroller?
A: Yes, the TB6612FNG supports logic levels as low as 2.7V, making it compatible with 3.3V microcontrollers.