How to Use Smart Elex RLS-08 Anolog and Digital Line Follower Sensor: Examples, Pinouts, and Specs
Introduction
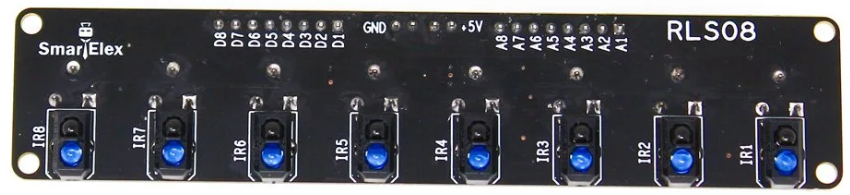
The Smart Elex RLS-08 Analog and Digital Line Follower Sensor is a versatile sensor designed to detect lines on the ground. It provides both analog and digital outputs, making it suitable for a wide range of applications. This sensor is commonly used in robotics, particularly in line-following robots, where it helps the robot detect and follow a predefined path. Its compact design and dual output functionality make it an excellent choice for hobbyists and professionals alike.
Explore Projects Built with Smart Elex RLS-08 Anolog and Digital Line Follower Sensor
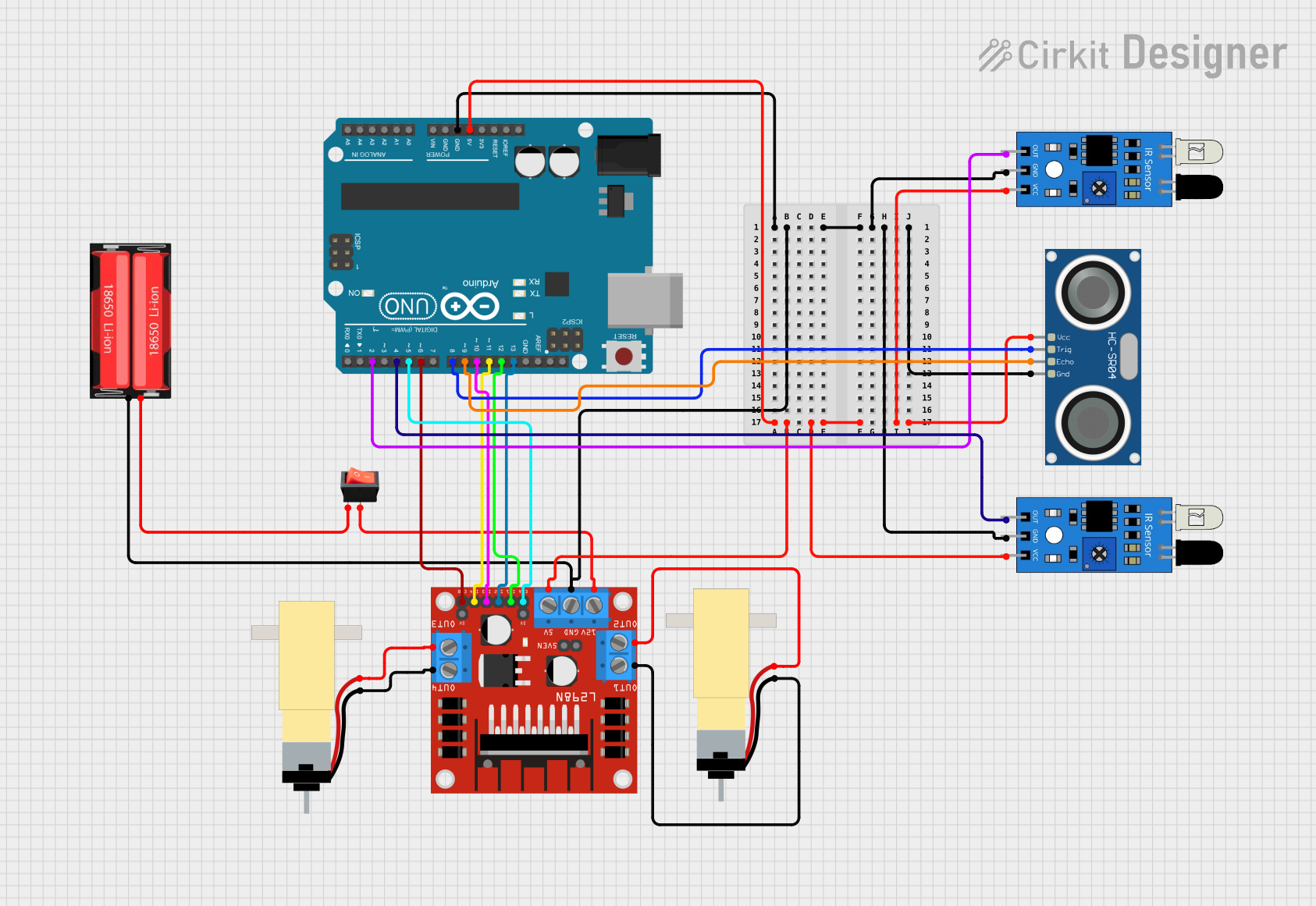
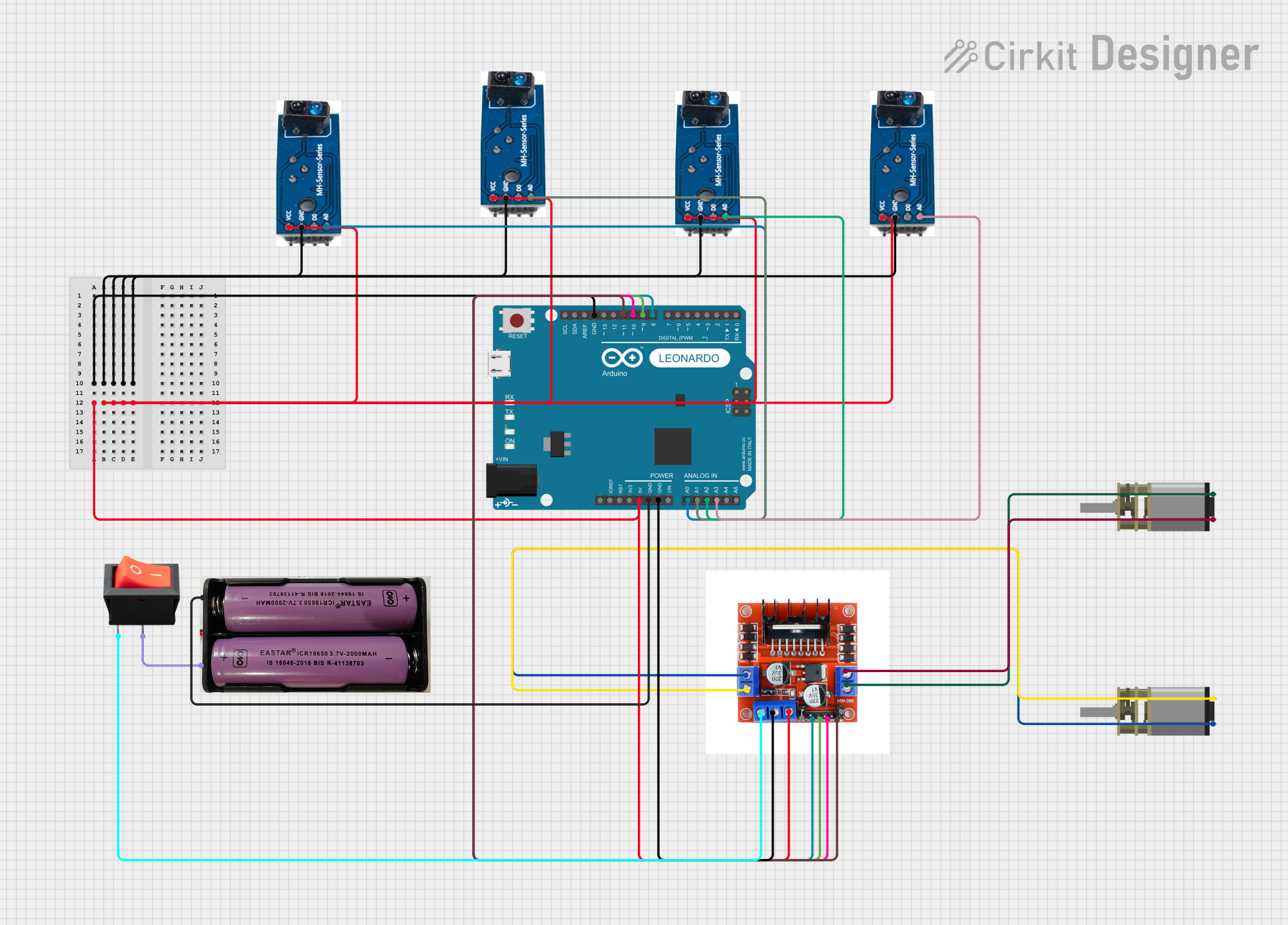
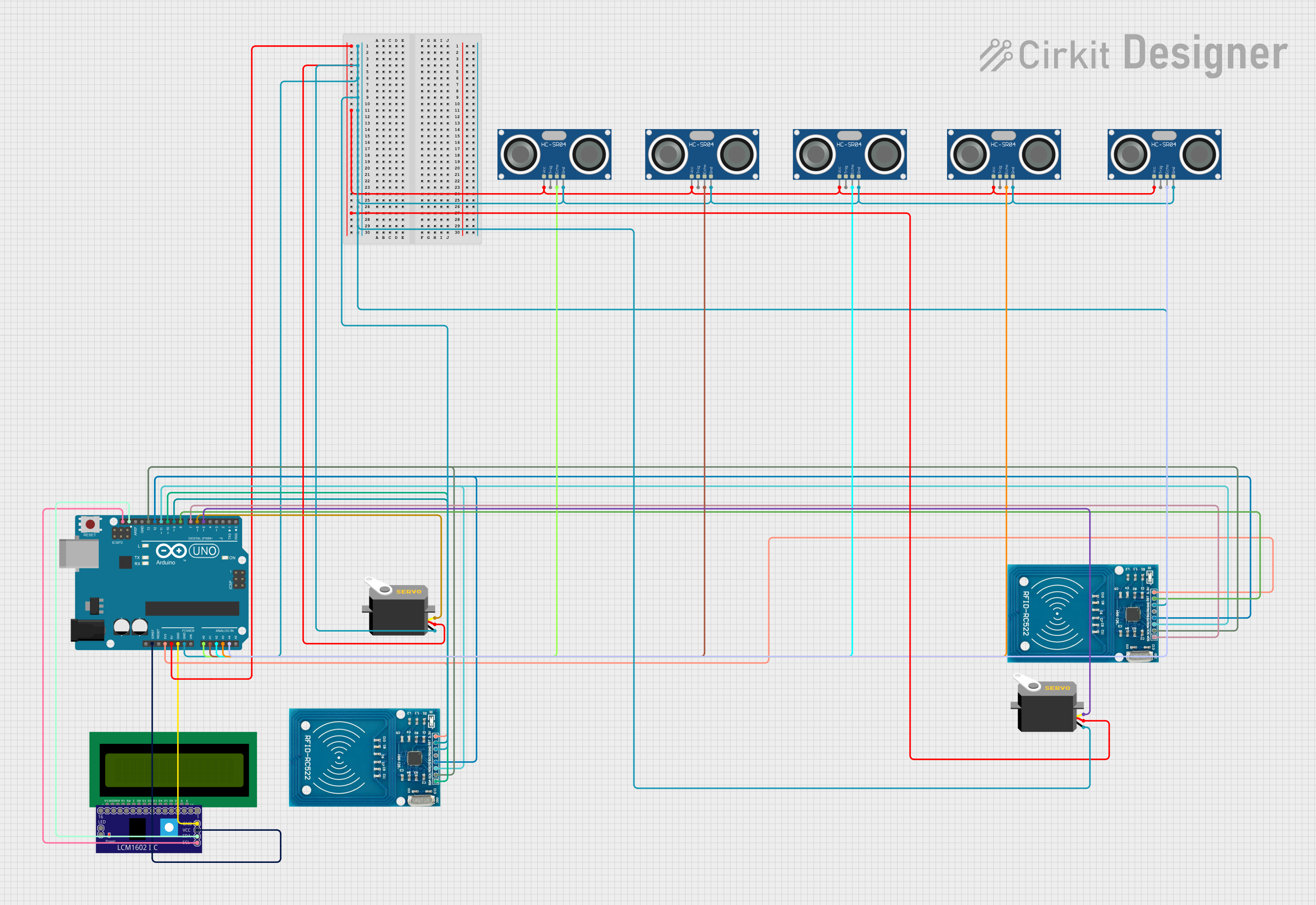
Explore Projects Built with Smart Elex RLS-08 Anolog and Digital Line Follower Sensor
Common Applications
- Line-following robots
- Path detection in automated guided vehicles (AGVs)
- Obstacle avoidance systems
- Edge detection in conveyor belts
- Educational robotics projects
Technical Specifications
Below are the key technical details of the Smart Elex RLS-08 sensor:
| Parameter | Value |
|---|---|
| Manufacturer | Smart Elex |
| Part ID | Line Follower Sensor |
| Operating Voltage | 3.3V to 5V |
| Output Type | Analog and Digital |
| Detection Range | 1mm to 12mm (optimal: 3mm to 5mm) |
| Sensor Type | Infrared (IR) |
| Dimensions | 32mm x 14mm x 7mm |
| Mounting Holes | 2 x M3 |
| Weight | 5g |
Pin Configuration and Descriptions
The sensor has a 3-pin interface for easy integration into circuits. Below is the pinout:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (3.3V to 5V). Connect to the positive terminal of the power. |
| 2 | GND | Ground. Connect to the negative terminal of the power supply. |
| 3 | OUT | Output signal. Provides both analog and digital signals based on line detection. |
Usage Instructions
How to Use the Sensor in a Circuit
- Power the Sensor: Connect the
VCCpin to a 3.3V or 5V power source and theGNDpin to the ground. - Connect the Output: Use the
OUTpin to read the sensor's output. The output can be connected to a microcontroller (e.g., Arduino) or directly to an LED for testing.- Digital Output: The sensor outputs a HIGH signal (logic 1) when it detects a white surface and a LOW signal (logic 0) when it detects a black surface.
- Analog Output: The sensor provides a variable voltage proportional to the intensity of the reflected light.
- Adjust the Sensitivity: Use the onboard potentiometer to fine-tune the sensor's sensitivity for optimal performance.
Important Considerations and Best Practices
- Optimal Distance: Ensure the sensor is placed 3mm to 5mm above the surface for accurate detection.
- Surface Contrast: Use surfaces with high contrast (e.g., black lines on a white background) for best results.
- Ambient Light: Avoid using the sensor in environments with excessive ambient light, as it may interfere with the IR detection.
- Wiring: Keep the wiring short to minimize noise and interference.
Example Code for Arduino UNO
Below is an example code snippet to use the RLS-08 sensor with an Arduino UNO:
// Define the sensor output pin
const int sensorPin = 2; // Connect the OUT pin of the sensor to digital pin 2
void setup() {
pinMode(sensorPin, INPUT); // Set the sensor pin as input
Serial.begin(9600); // Initialize serial communication at 9600 baud
}
void loop() {
int sensorValue = digitalRead(sensorPin); // Read the digital output of the sensor
if (sensorValue == HIGH) {
// If the sensor detects a white surface
Serial.println("White surface detected");
} else {
// If the sensor detects a black surface
Serial.println("Black surface detected");
}
delay(100); // Add a small delay for stability
}
Notes:
- If you want to use the analog output, connect the
OUTpin to an analog input pin on the Arduino (e.g., A0) and useanalogRead()instead ofdigitalRead().
Troubleshooting and FAQs
Common Issues and Solutions
Sensor Not Detecting Lines
- Cause: Incorrect placement or distance from the surface.
- Solution: Adjust the sensor height to 3mm-5mm above the surface and ensure the surface has high contrast.
Inconsistent Readings
- Cause: Ambient light interference or improper sensitivity settings.
- Solution: Reduce ambient light or adjust the potentiometer to fine-tune the sensitivity.
No Output Signal
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check the wiring and ensure the power supply is within the specified range (3.3V to 5V).
Output Always HIGH or LOW
- Cause: Faulty sensor or improper surface contrast.
- Solution: Test the sensor on a known high-contrast surface. If the issue persists, consider replacing the sensor.
FAQs
Q1: Can I use this sensor with a 3.3V microcontroller?
A1: Yes, the sensor operates within a voltage range of 3.3V to 5V, making it compatible with 3.3V microcontrollers.
Q2: How do I know if the sensor is working?
A2: You can test the sensor by connecting an LED to the OUT pin. The LED should turn ON when a white surface is detected and OFF when a black surface is detected.
Q3: Can I use multiple sensors for a robot?
A3: Yes, you can use multiple RLS-08 sensors to create a more robust line-following system. Connect each sensor to a separate input pin on your microcontroller.
Q4: What is the difference between analog and digital output?
A4: The digital output provides a binary signal (HIGH or LOW) based on line detection, while the analog output provides a variable voltage proportional to the intensity of the reflected light.
By following this documentation, you can effectively integrate and use the Smart Elex RLS-08 Analog and Digital Line Follower Sensor in your projects.