How to Use Adafruit Crickit FeatherWing: Examples, Pinouts, and Specs
Introduction
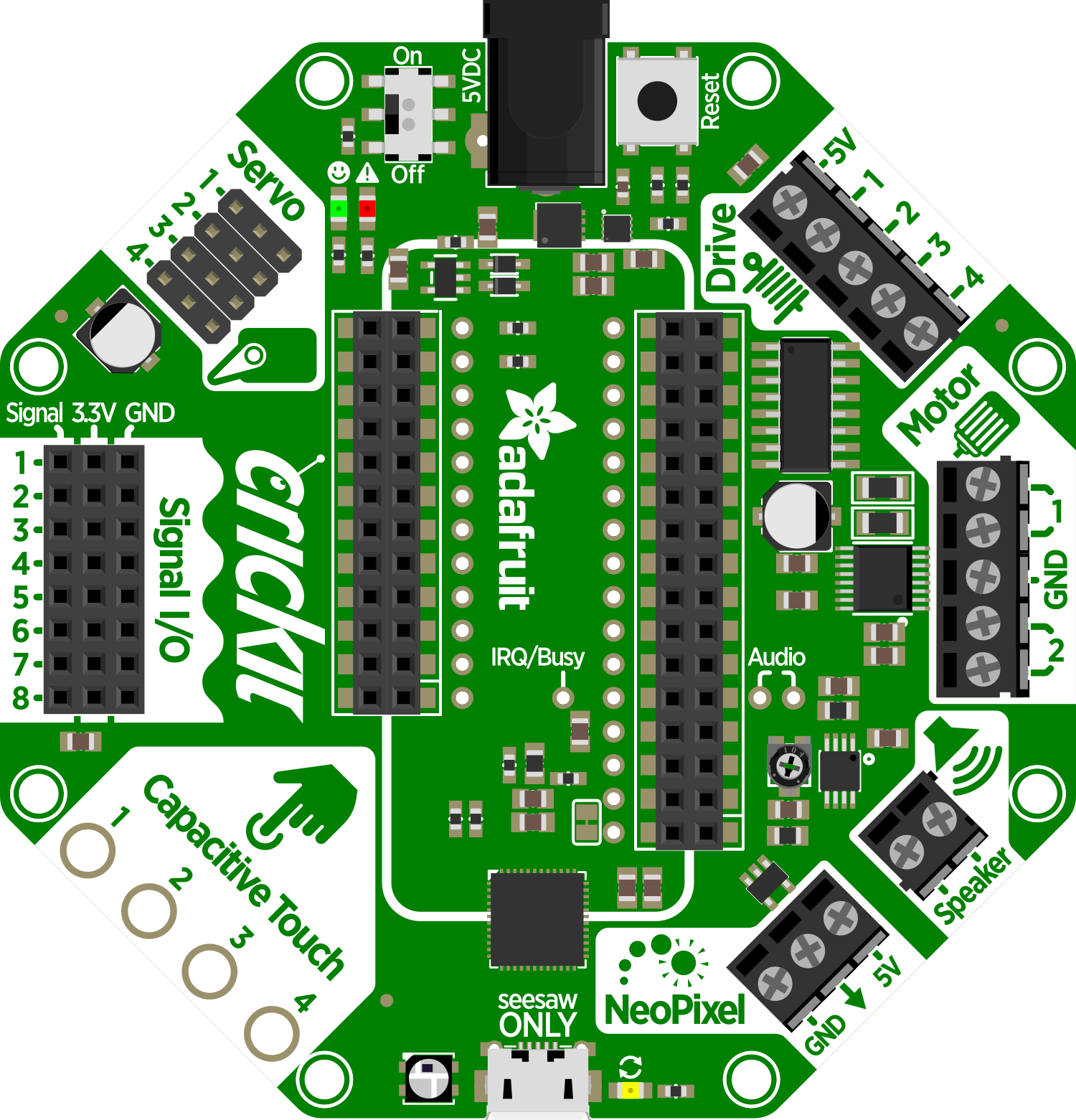
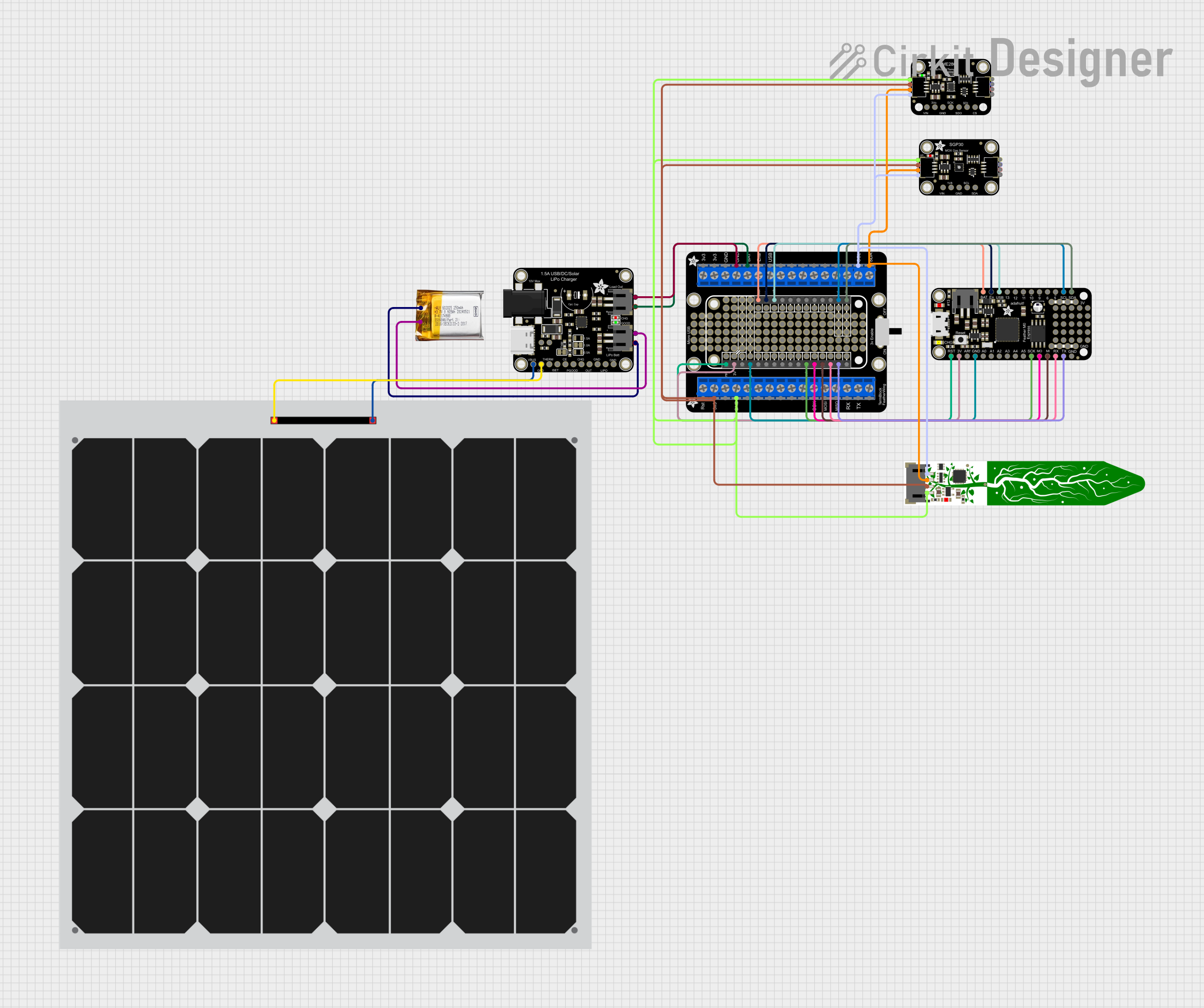
The Adafruit Crickit FeatherWing is a versatile add-on board designed for use with the Feather ecosystem. It is specifically tailored for robotics and automation projects, enabling users to control a wide array of actuators, sensors, and other electronic components. The Crickit FeatherWing simplifies the process of connecting complex circuits to a Feather board, making it an ideal choice for hobbyists, educators, and prototyping professionals.
Explore Projects Built with Adafruit Crickit FeatherWing
Explore Projects Built with Adafruit Crickit FeatherWing
Common Applications and Use Cases
- Educational robotics
- DIY home automation
- Interactive art installations
- Prototyping for industrial automation
- Custom remote-controlled vehicles
Technical Specifications
Key Technical Details
- Operating Voltage: 3.3V to 5V
- Logic Voltage: 3.3V (compatible with all Feather boards)
- Motor Drivers: 4 full H-Bridges with 1.2A per bridge (peak 3A) at 4.5V to 13.5V
- Servo Control: 8 channels for hobby servos
- PWM Outputs: 4 for LEDs or other PWM-controllable devices
- Analog Inputs: 4 for sensors
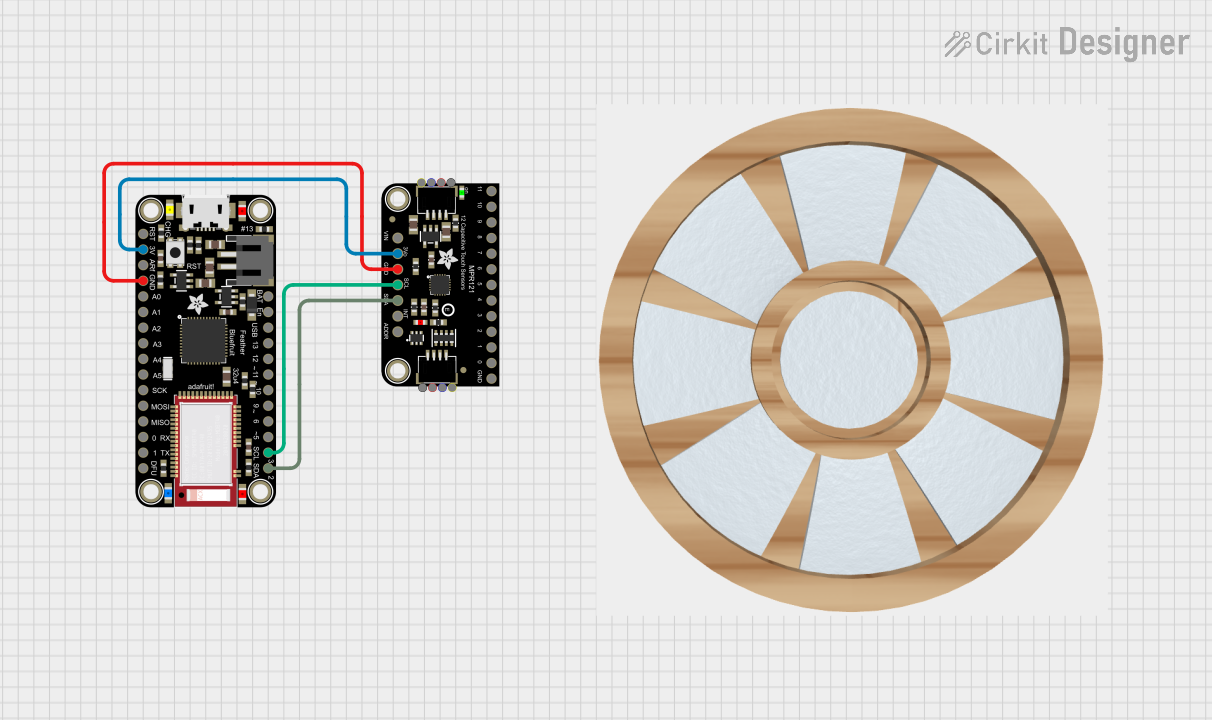
- Capacitive Touch Inputs: 8 with no additional components required
- Signal Connectors: Grove connectors for I2C and UART devices
Pin Configuration and Descriptions
| Pin | Function | Description |
|---|---|---|
| GND | Ground | Common ground for all circuits |
| 3V3 | 3.3V Power | Regulated 3.3V power output |
| VIN | Voltage Input | Input voltage for the board (4.5V to 13.5V) |
| A1-A4 | Analog Inputs | Analog sensor inputs |
| D5-D12 | Digital I/O | Digital input/output for sensors and actuators |
| SDA/SCL | I2C Data/Clock | I2C communication pins |
| RX/TX | UART Receive/Transmit | Serial communication pins |
| Motor 1-4 | Motor Outputs | Outputs for connecting DC motors |
| Servo 1-8 | Servo Outputs | Outputs for connecting hobby servos |
Usage Instructions
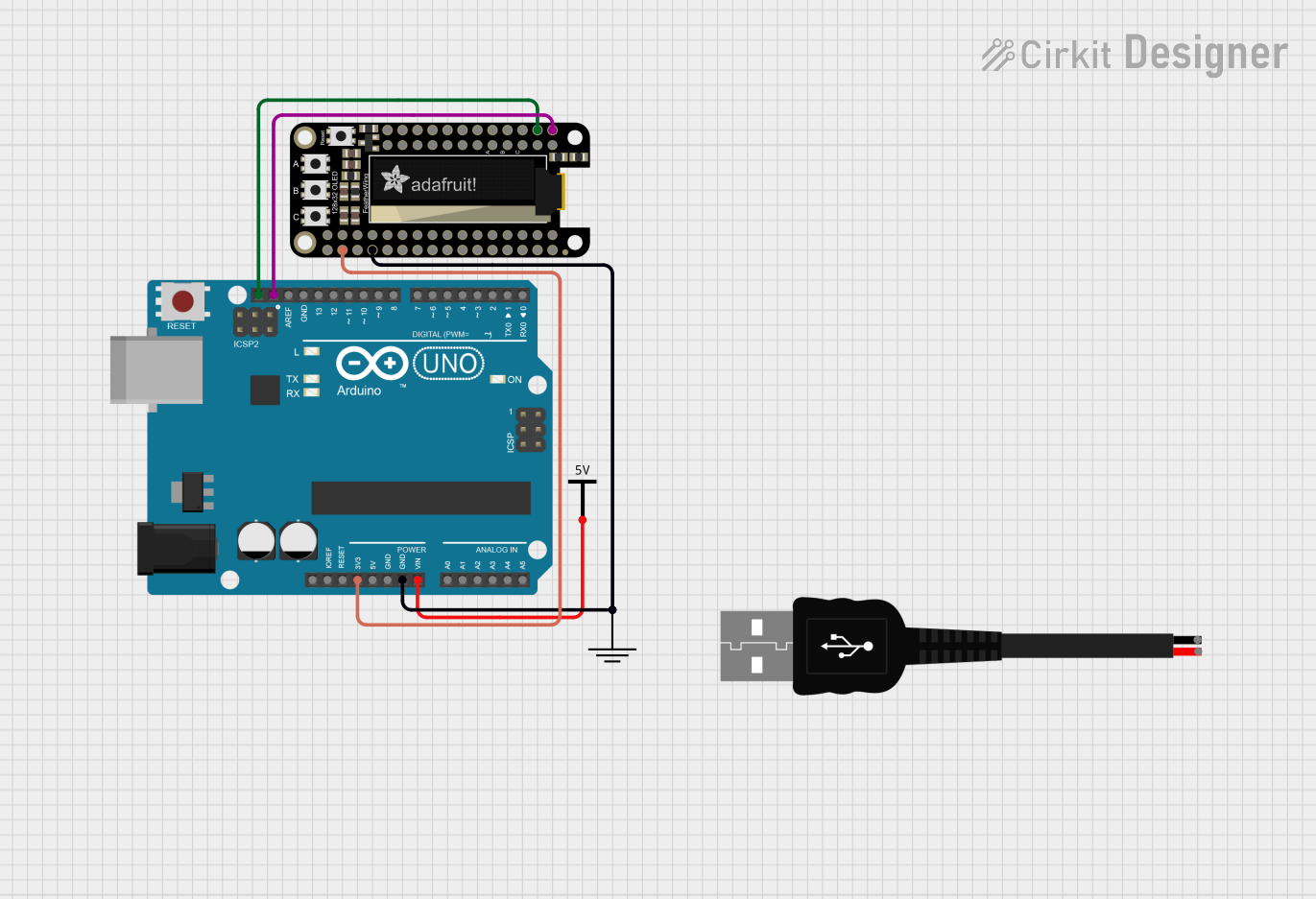
How to Use the Component in a Circuit
- Powering the Crickit: Connect a power supply to the VIN and GND pins, ensuring the voltage is within the specified range (4.5V to 13.5V).
- Connecting a Feather Board: Attach a compatible Feather board to the Crickit FeatherWing using the provided headers.
- Attaching Actuators and Sensors: Connect motors to the motor outputs, servos to the servo outputs, and sensors to the analog or digital I/O pins as required for your project.
- Programming the Feather Board: Write and upload code to the Feather board to control the connected components through the Crickit FeatherWing.
Important Considerations and Best Practices
- Always disconnect power before making or altering connections.
- Double-check wiring, especially for motors, to prevent damage to the board.
- Use external power when driving multiple servos or motors to avoid overloading the Feather board's power supply.
- Ensure that the total current draw does not exceed the maximum ratings for the Crickit FeatherWing.
Troubleshooting and FAQs
Common Issues
- Motors not running: Check power supply and wiring. Ensure that the code is correctly controlling the motor pins.
- Servos jittering: This can be due to an insufficient power supply. Use a separate power source for servos.
- Unresponsive board: Verify that the Feather board is properly seated and that the Crickit FeatherWing is receiving power.
Solutions and Tips for Troubleshooting
- Always start with a simple test code to ensure basic functionality before moving on to more complex projects.
- If a component is not working, try isolating it and testing it separately.
- Consult the Adafruit forums and guides for additional support and community advice.
Example Code for Arduino UNO
#include <Adafruit_Crickit.h>
// Initialize the Crickit Shield
Adafruit_Crickit crickit;
void setup() {
// Start the Crickit Shield
crickit.begin();
}
void loop() {
// Example: Control a servo on channel 1
crickit.servo1.write(90); // Set servo to 90-degree position
delay(1000); // Wait for 1 second
crickit.servo1.write(0); // Set servo to 0-degree position
delay(1000); // Wait for 1 second
}
Note: This example assumes that you have installed the Adafruit_Crickit library. The code comments are kept under 80 characters per line to maintain readability.
For more detailed information and advanced usage, please refer to the official Adafruit Crickit FeatherWing guide and the Adafruit Learning System.