How to Use KX134: Examples, Pinouts, and Specs
Introduction
The KX134 is a high-performance, low-power 3-axis accelerometer designed by Kionix, a subsidiary of ROHM Semiconductor. This sensor is capable of measuring acceleration with a full-scale range of ±8g, ±16g, ±32g, and ±64g. It is commonly used in applications such as motion detection, vibration monitoring, and dynamic orientation detection in devices like smartphones, gaming controllers, and vehicle navigation systems.
Explore Projects Built with KX134


Explore Projects Built with KX134
Technical Specifications
Key Features
- Sensing Range: ±8g, ±16g, ±32g, ±64g (selectable)
- Output: Digital (I2C/SPI)
- Voltage Supply: 1.7V to 3.6V
- Current Consumption: 0.9µA (standby), 145µA (operating at low power)
- Interface: I2C (up to 3.4MHz), SPI (up to 10MHz)
- Operating Temperature: -40°C to +85°C
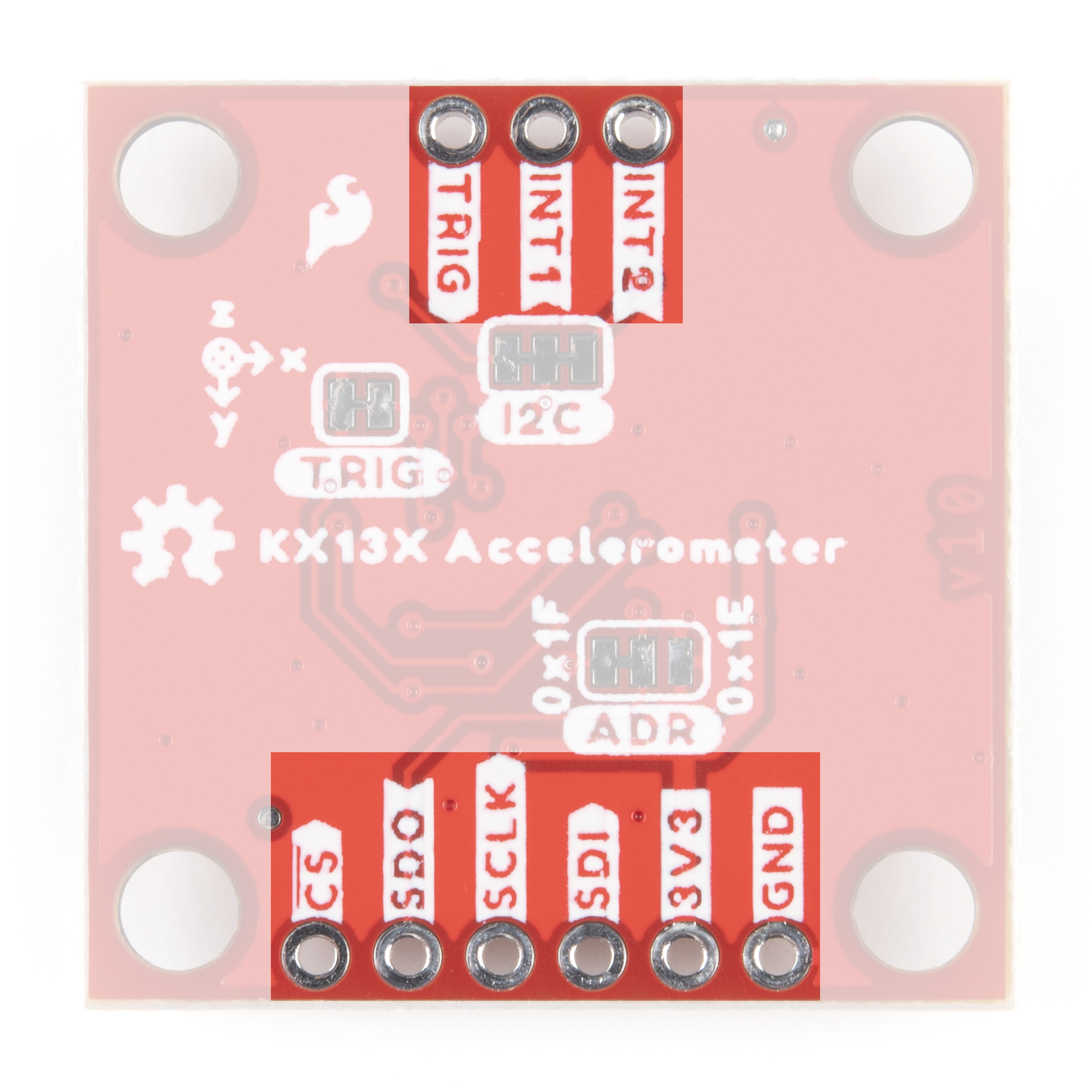
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VDD | Power supply voltage |
| 2 | GND | Ground |
| 3 | SCL/SPC | Serial Clock for I2C/SPI Clock |
| 4 | SDA/SDI | Serial Data for I2C/SPI Data Input |
| 5 | SDO | SPI Data Output (optional) |
| 6 | CS | Chip Select for SPI (active low) |
| 7 | INT1 | Interrupt 1 (configurable) |
| 8 | INT2 | Interrupt 2 (configurable) |
Usage Instructions
Integration into a Circuit
- Power Supply: Connect VDD to a 1.7V to 3.6V source and GND to the system ground.
- Data Interface: For I2C communication, connect SCL to the I2C clock line and SDA to the I2C data line. For SPI, connect SCL/SPC to the SPI clock, SDA/SDI to the SPI data input, and SDO to the SPI data output if needed.
- Chip Select: For SPI, the CS pin must be connected to a digital output pin on the microcontroller and driven low to initiate communication.
- Interrupts: INT1 and INT2 can be connected to digital input pins on the microcontroller if interrupt-driven operation is required.
Best Practices
- Ensure that the power supply is stable and within the specified voltage range.
- Use pull-up resistors on the I2C lines if they are not already provided in the microcontroller.
- Keep the communication lines as short as possible to reduce noise and interference.
- Configure the sensor settings such as range and bandwidth according to the application requirements.
Example Code for Arduino UNO
#include <Wire.h>
// KX134 I2C address (assuming SDO pin is connected to GND)
const int KX134_I2C_ADDRESS = 0x1E;
void setup() {
Wire.begin(); // Initialize I2C
Serial.begin(9600); // Start serial communication at 9600 baud rate
// Setup KX134 (write appropriate configuration registers)
// This is a placeholder for actual configuration code
}
void loop() {
// Read acceleration data from KX134
// This is a placeholder for actual data reading code
// Process and output the acceleration data
// This is a placeholder for actual data processing and output
}
Note: The above code is a template and does not include specific register addresses or data processing. Users must refer to the KX134 datasheet for detailed register descriptions and configure the device accordingly.
Troubleshooting and FAQs
Common Issues
- No Data Output: Ensure that the power supply is within range and that the I2C/SPI lines are correctly connected.
- Inaccurate Readings: Verify that the accelerometer range is correctly set for your application. Also, check for any sources of electromagnetic interference.
Solutions and Tips
- Power Supply Issues: Use a decoupling capacitor close to the VDD pin to filter out noise.
- Communication Errors: Check for proper pull-up resistors on the I2C lines and ensure that the SPI lines are not too long or susceptible to crosstalk.
FAQs
Q: Can the KX134 operate in both I2C and SPI modes? A: Yes, the KX134 can operate in either I2C or SPI mode, but the mode must be selected correctly through the pin connections and configuration settings.
Q: What is the purpose of the INT1 and INT2 pins? A: These pins can be configured to output interrupt signals for various events such as motion detection, free-fall, or data ready notifications.
Q: How do I change the sensing range of the KX134? A: The sensing range can be changed by writing to the appropriate configuration registers. Refer to the datasheet for the specific register settings.
Q: Is the KX134 suitable for battery-powered applications? A: Yes, with its low-power consumption in standby and operating modes, the KX134 is suitable for battery-powered applications.
For more detailed information, please refer to the KX134 datasheet provided by Kionix.