How to Use SparkFun AST-CAN485: Examples, Pinouts, and Specs
Introduction
The SparkFun AST-CAN485 is a versatile shield designed for Arduino-compatible boards, enabling communication over CAN (Controller Area Network) and RS485 networks. This shield is particularly useful in automotive and industrial environments where robust and reliable communication is essential. The AST-CAN485 integrates both CAN and RS485 transceivers, offering a bridge between these two popular communication protocols.
Explore Projects Built with SparkFun AST-CAN485
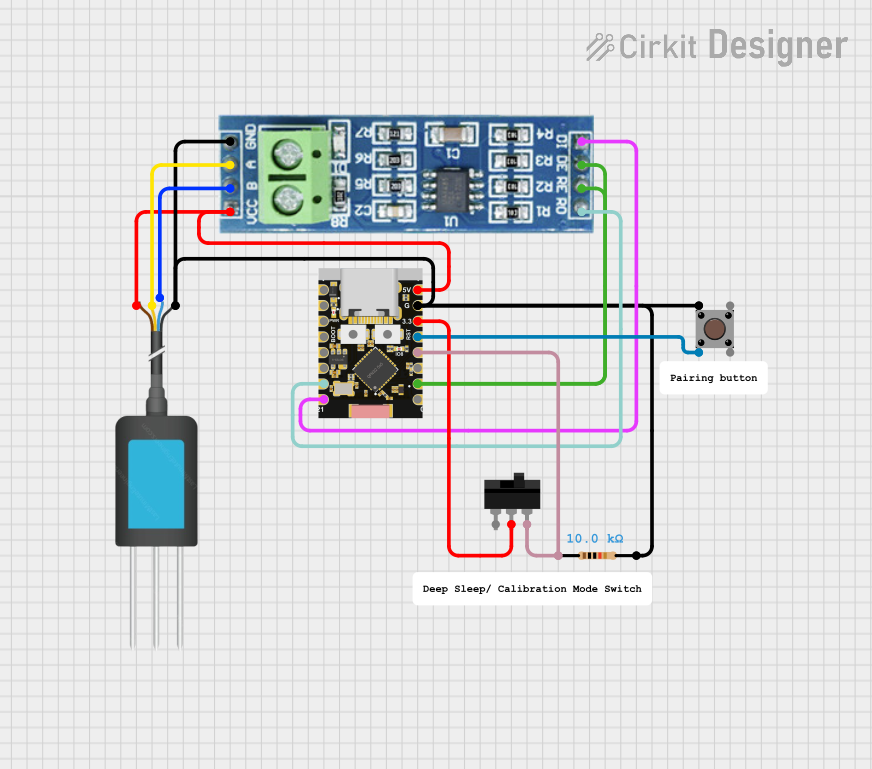
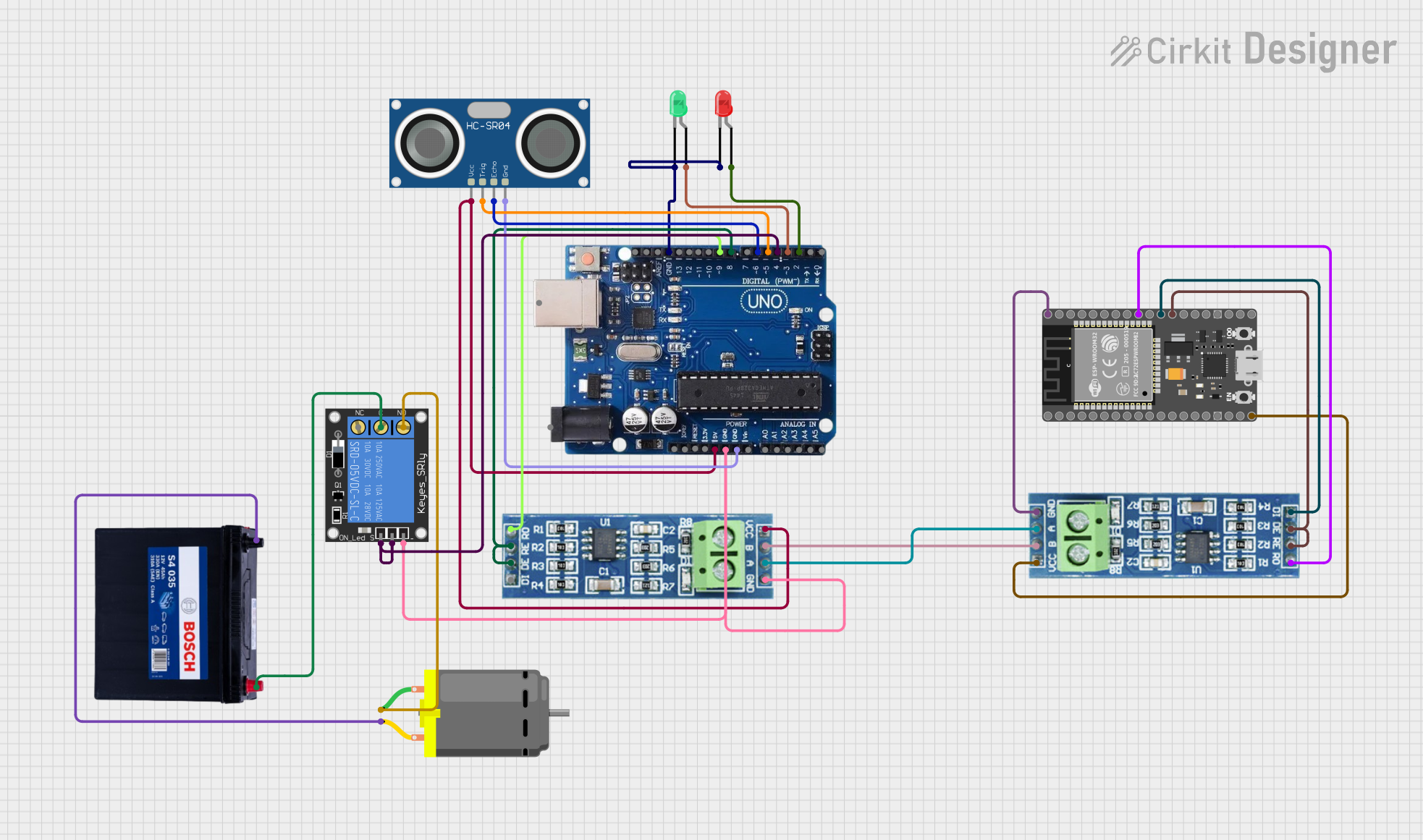
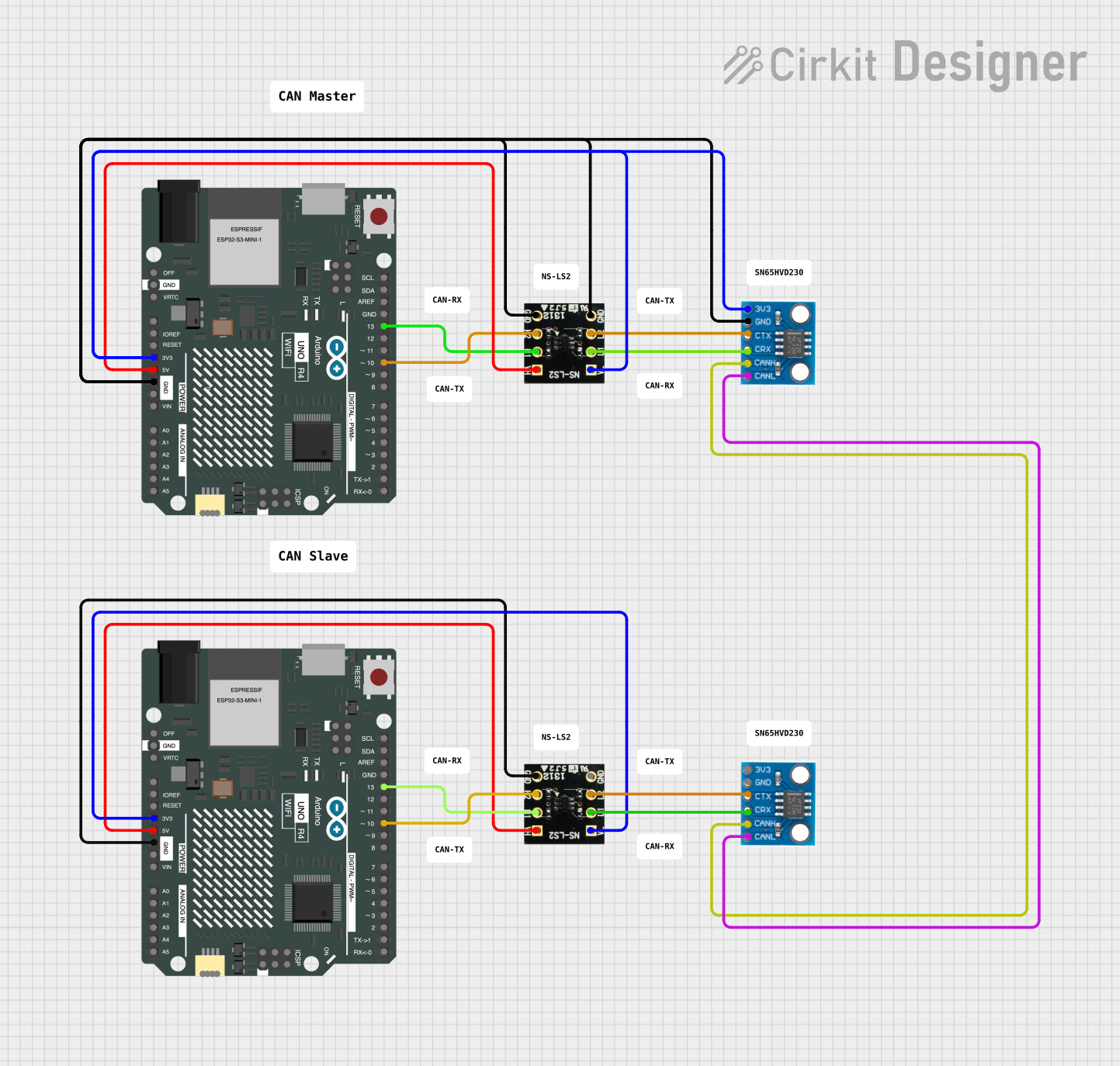
Explore Projects Built with SparkFun AST-CAN485
Common Applications and Use Cases
- Automotive diagnostics and networking
- Industrial automation and control systems
- Robotics communication interfaces
- Data logging and telemetry
Technical Specifications
Key Technical Details
- Operating Voltage: 3.3V to 5V
- CAN Controller: MCP2515
- CAN Transceiver: MCP2551
- RS485 Transceiver: SP3485
- CAN 2.0B up to 1 Mb/s
- High speed SPI Interface (10 MHz)
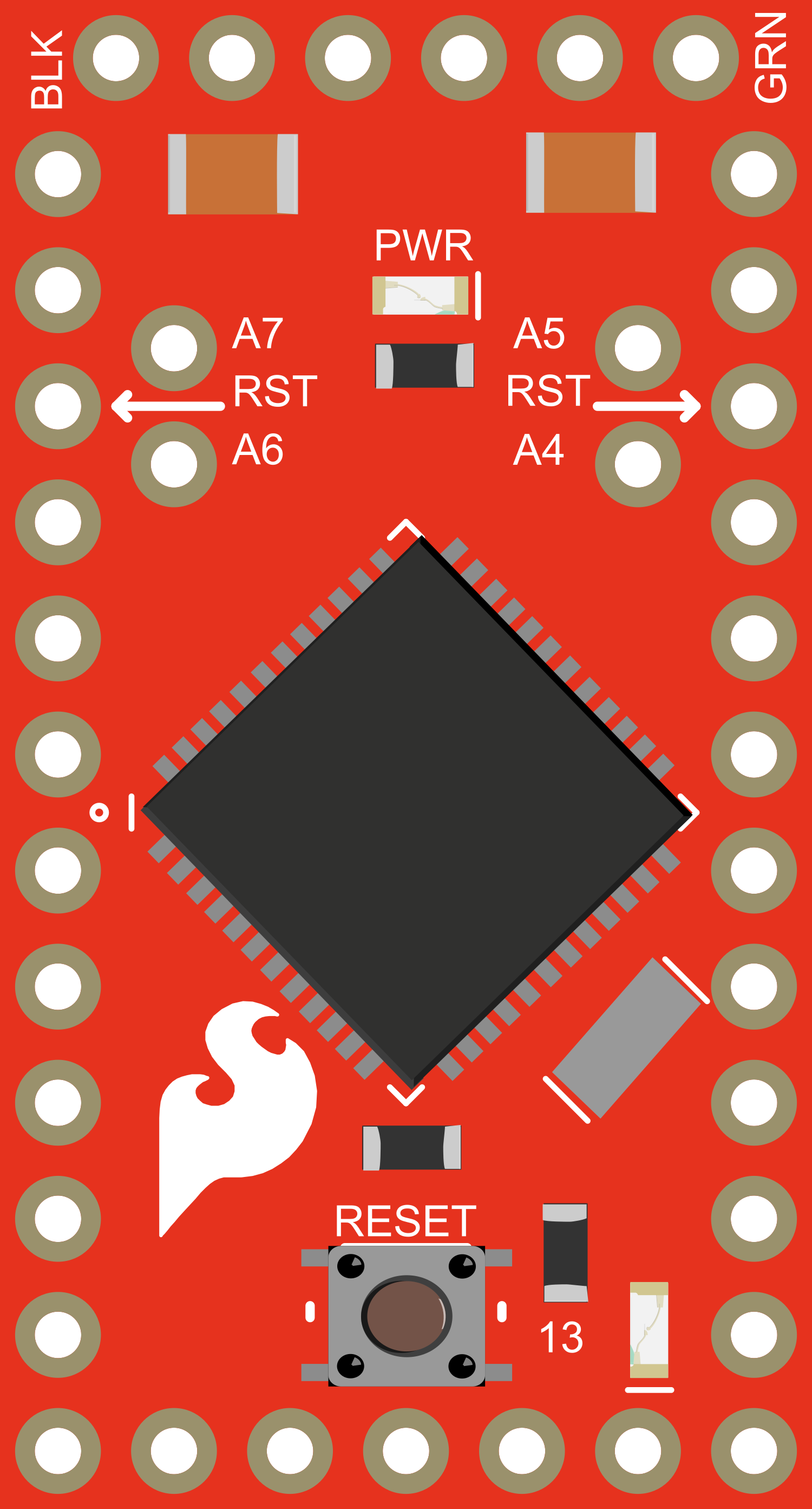
Pin Configuration and Descriptions
| Pin Number | Function | Description |
|---|---|---|
| D2 | INT | Interrupt pin for CAN controller |
| D9 | CS | Chip select for CAN controller |
| D10 | RS485 DE/RE | RS485 Driver Enable / Receiver Enable |
| D11 | MOSI | SPI communication with CAN controller |
| D12 | MISO | SPI communication with CAN controller |
| D13 | SCK | SPI communication with CAN controller |
| A4 | RS485 DI | RS485 Data In |
| A5 | RS485 RO | RS485 Data Out |
Usage Instructions
How to Use the Component in a Circuit
Mounting the Shield: Attach the SparkFun AST-CAN485 shield onto your Arduino-compatible board ensuring proper alignment of pins.
Wiring for CAN: Connect the CANH and CANL screw terminals to your CAN network. Ensure that the network has proper termination resistors.
Wiring for RS485: Connect the A and B screw terminals to your RS485 network. Ensure that the network is properly terminated.
Power Supply: Ensure that your Arduino board is powered with a suitable power source that can provide adequate current for both the Arduino and the AST-CAN485 shield.
Important Considerations and Best Practices
- Use twisted-pair cables for CAN and RS485 to reduce electromagnetic interference.
- Ensure that the shield is properly seated on the Arduino board to avoid misalignment of pins.
- When working with automotive systems, be aware of the potential for electrical noise and take appropriate measures to shield your connections.
- Always follow proper ESD precautions when handling the shield to prevent damage to sensitive components.
Example Code for Arduino UNO
#include <SPI.h>
#include <mcp_can.h>
// Initialize CAN controller with CS pin D9
MCP_CAN CAN(D9);
void setup() {
Serial.begin(115200);
// Initialize CAN bus at 500 kbps
if (CAN.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN bus shield initialized successfully!");
} else {
Serial.println("Error initializing CAN bus shield!");
}
}
void loop() {
// Check for incoming messages
if (CAN_MSGAVAIL == CAN.checkReceive()) {
long unsigned int rxId;
unsigned char len = 0;
unsigned char rxBuf[8];
// Read data: len = data length, buf = data byte(s)
CAN.readMsgBuf(&len, rxBuf);
rxId = CAN.getCanId();
Serial.print("Message ID: ");
Serial.print(rxId, HEX);
Serial.print(" Data: ");
for (int i = 0; i < len; i++) {
Serial.print(rxBuf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Troubleshooting and FAQs
Common Issues Users Might Face
- CAN/RS485 Not Communicating: Ensure that all connections are secure and the network is properly terminated with resistors.
- No Data Being Received: Check that the interrupt and CS pins are correctly defined in your code.
- Errors in Serial Monitor: Verify that the baud rate of the Serial Monitor matches the baud rate defined in your sketch.
Solutions and Tips for Troubleshooting
- Double-check wiring and pin connections.
- Use the
CAN_OKreturn code to check for successful initialization of the CAN controller. - Ensure that the SPI clock does not exceed the maximum frequency supported by the CAN controller.
- Review the example code and library documentation for additional functions and diagnostic tools.
FAQs
Q: Can I use the AST-CAN485 shield with a 3.3V Arduino board? A: Yes, the shield is compatible with both 3.3V and 5V systems.
Q: How do I change the CAN bus speed?
A: Modify the CAN.begin() function in your code to set the desired speed (e.g., CAN_250KBPS).
Q: What is the maximum length for a CAN or RS485 network? A: The maximum length depends on the baud rate and quality of the cables but can be up to 1200 meters for RS485 and 40 meters for CAN at 1 Mbps.
Q: How do I handle multiple nodes on a CAN network? A: Each node should have a unique ID, and the network should be properly terminated at both ends.
For further assistance, consult the SparkFun AST-CAN485 datasheet and the libraries' documentation.