How to Use VL53L0X Flight Time Sensor: Examples, Pinouts, and Specs
Introduction
The VL53L0X is a compact time-of-flight (ToF) distance sensor that uses laser light to measure distances with high accuracy. It is based on STMicroelectronics' FlightSense™ technology, which enables precise and reliable distance measurements. The sensor is capable of measuring distances up to 2 meters and is widely used in robotics, automation, drones, and IoT applications for obstacle detection, ranging, and proximity sensing.
Explore Projects Built with VL53L0X Flight Time Sensor
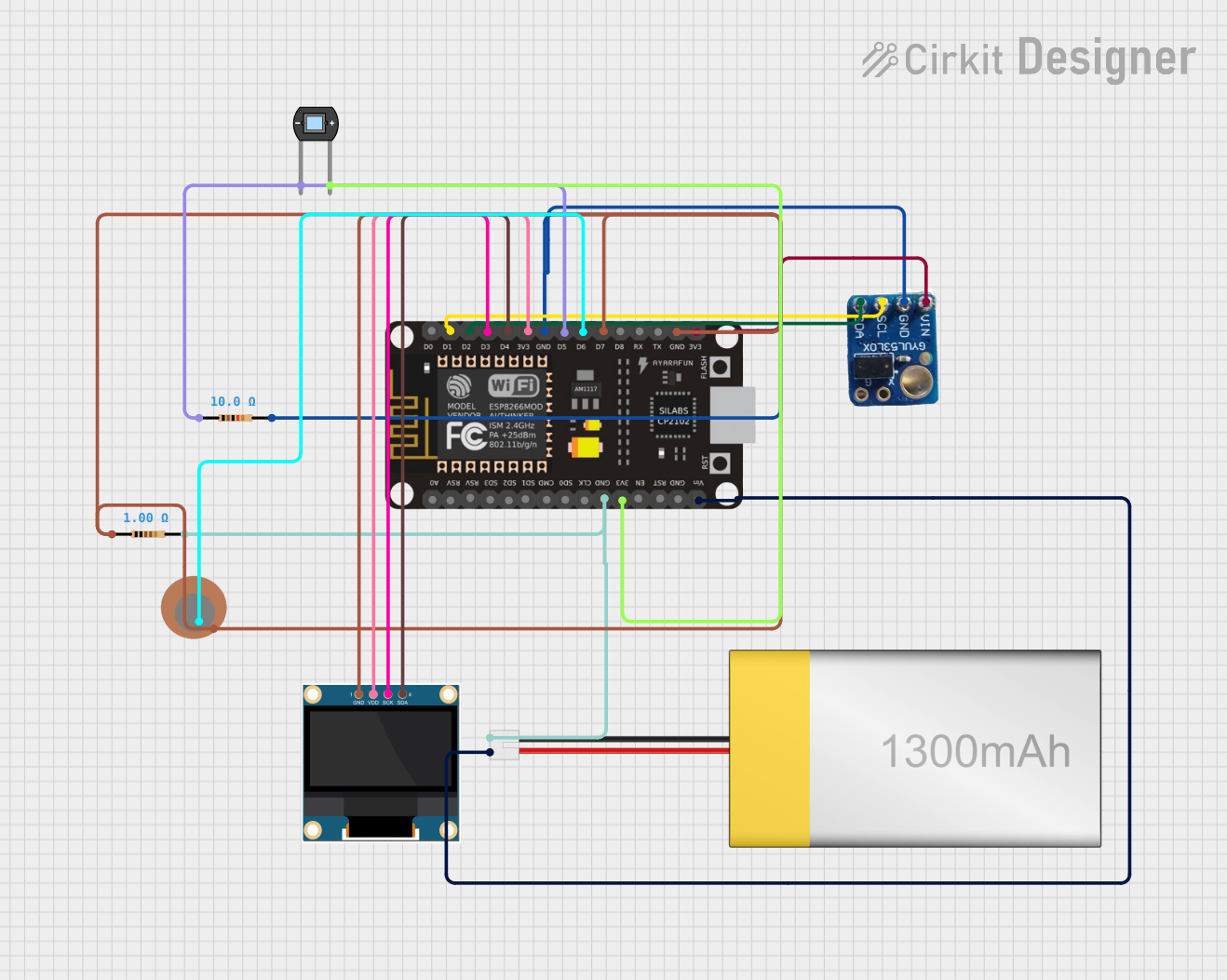
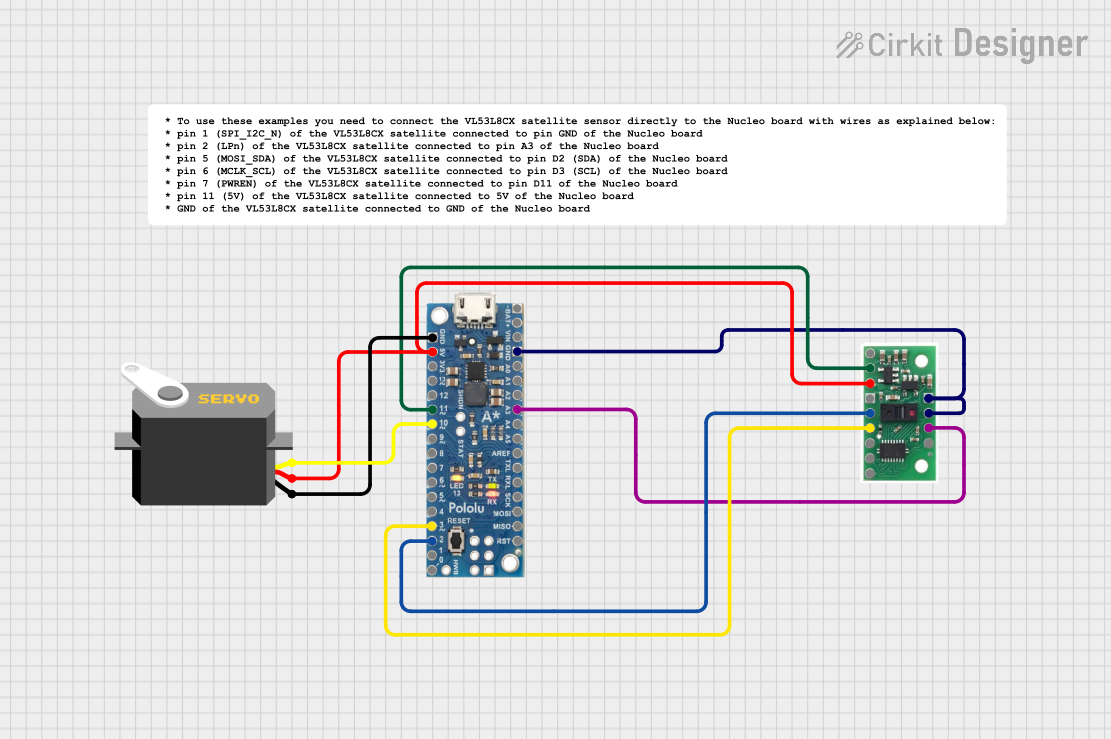
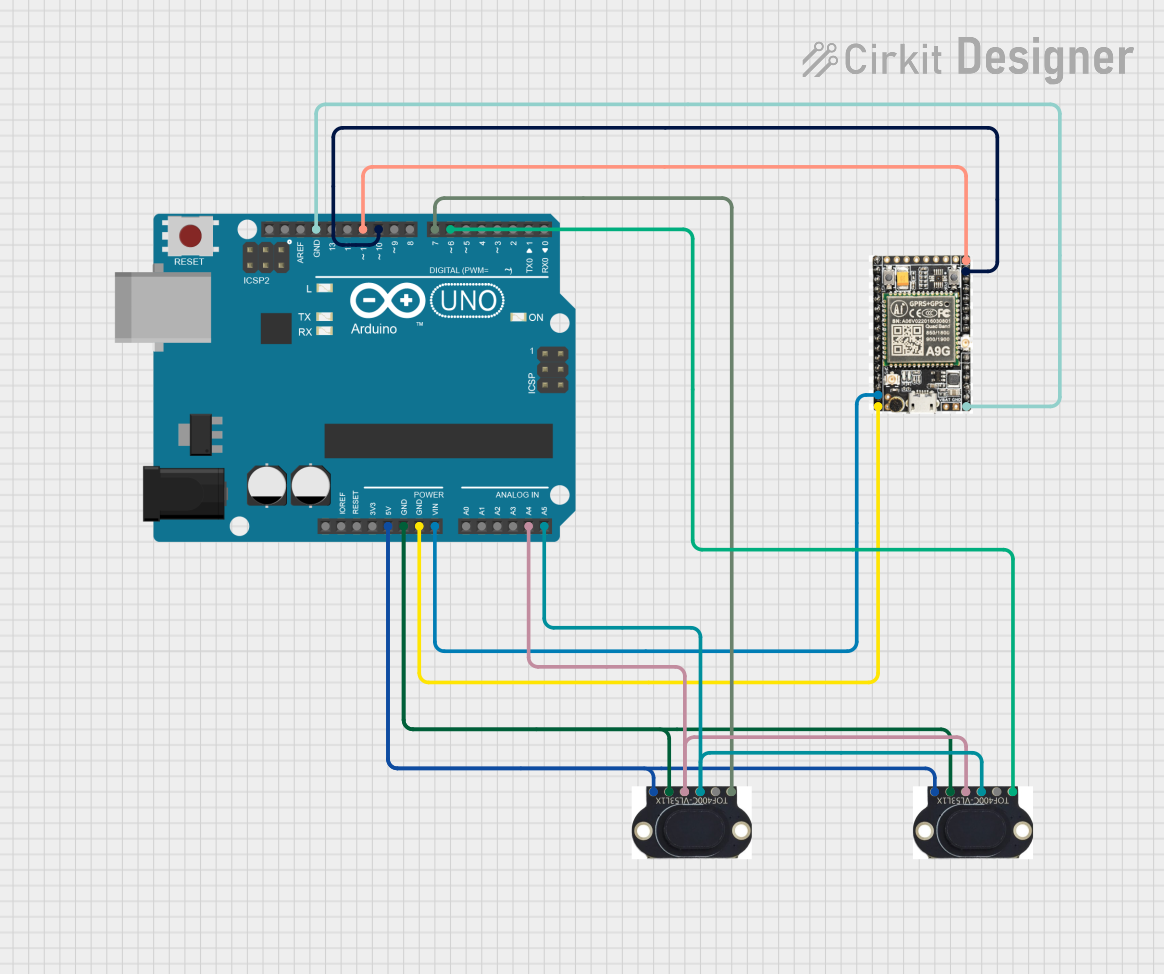
Explore Projects Built with VL53L0X Flight Time Sensor
Common Applications and Use Cases
- Obstacle detection in robotics and drones
- Proximity sensing in smart devices
- Distance measurement in industrial automation
- Gesture recognition systems
- Object tracking in IoT applications
Technical Specifications
The VL53L0X sensor offers excellent performance in a small package. Below are its key technical details:
| Parameter | Value |
|---|---|
| Operating Voltage | 2.6V to 3.5V |
| Communication Interface | I²C |
| Measurement Range | 30mm to 2000mm (2 meters) |
| Accuracy | ±3% |
| Field of View (FoV) | 25° |
| Operating Temperature | -20°C to +70°C |
| Power Consumption | 20mW (typical) |
| Dimensions | 4.4mm x 2.4mm x 1.0mm |
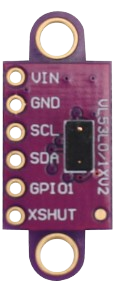
Pin Configuration and Descriptions
The VL53L0X sensor module typically comes with the following pins:
| Pin Name | Description |
|---|---|
| VIN | Power supply input (2.6V to 5V) |
| GND | Ground |
| SDA | I²C data line |
| SCL | I²C clock line |
| XSHUT | Shutdown pin (active low, optional) |
| GPIO1 | Interrupt output (optional) |
Usage Instructions
The VL53L0X sensor is easy to integrate into a circuit and communicate with using the I²C protocol. Below are the steps to use the sensor effectively:
Connecting the VL53L0X to an Arduino UNO
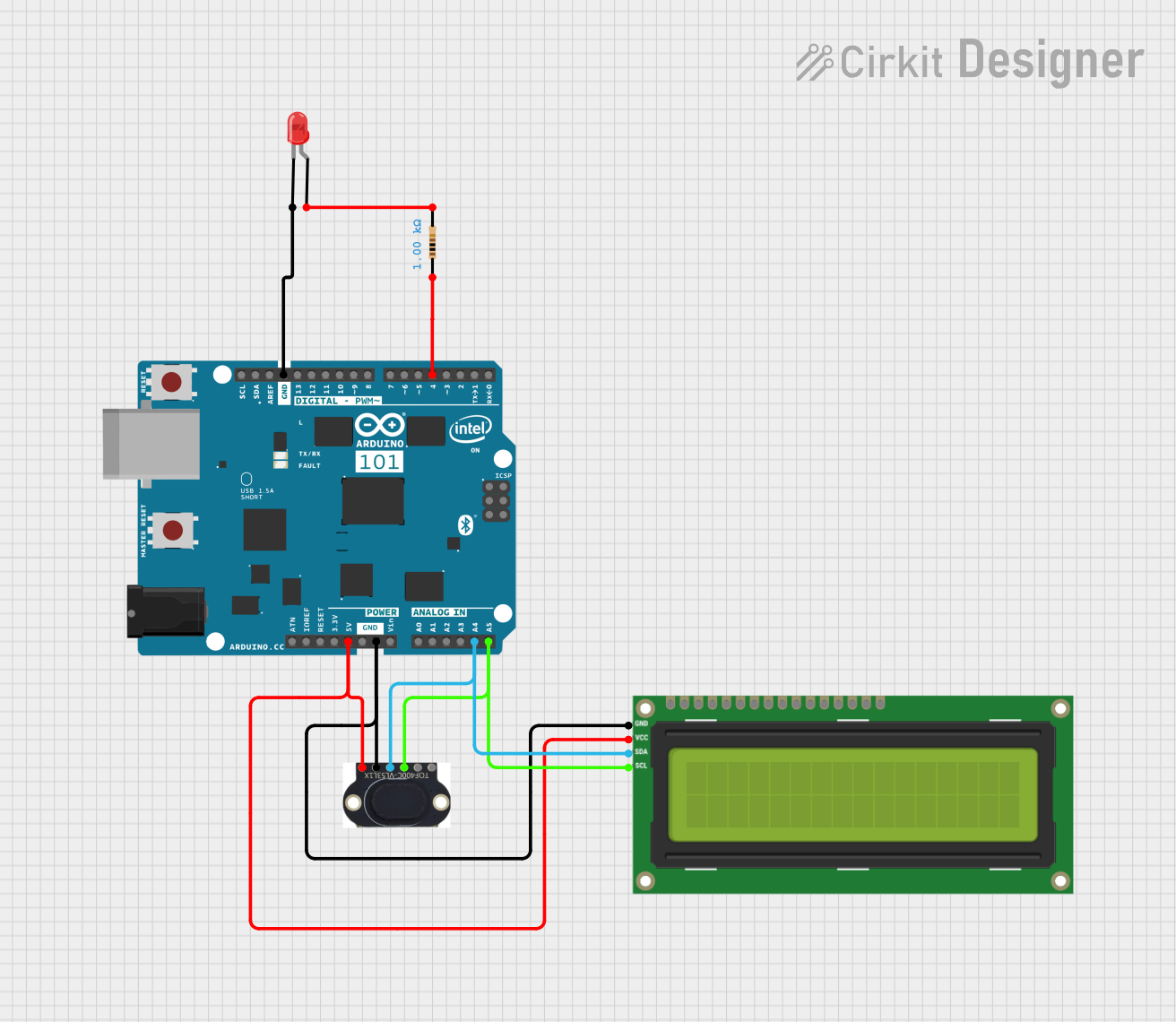
Wiring: Connect the sensor to the Arduino as follows:
VINto Arduino5VGNDto ArduinoGNDSDAto ArduinoA4(I²C data line)SCLto ArduinoA5(I²C clock line)- Optionally, connect
XSHUTto a digital pin for shutdown control.
Install the VL53L0X Library:
- Open the Arduino IDE.
- Go to Sketch > Include Library > Manage Libraries.
- Search for "VL53L0X" and install the library by Pololu.
Upload Example Code: Use the following example code to read distance measurements from the sensor:
#include <Wire.h> #include <VL53L0X.h> VL53L0X sensor; void setup() { Serial.begin(9600); // Initialize serial communication Wire.begin(); // Initialize I²C communication // Initialize the VL53L0X sensor if (!sensor.init()) { Serial.println("Failed to initialize VL53L0X sensor!"); while (1); // Halt execution if initialization fails } sensor.setTimeout(500); // Set timeout for measurements Serial.println("VL53L0X sensor initialized successfully."); } void loop() { // Read distance in millimeters uint16_t distance = sensor.readRangeSingleMillimeters(); // Check for timeout errors if (sensor.timeoutOccurred()) { Serial.println("Sensor timeout occurred!"); } else { Serial.print("Distance: "); Serial.print(distance); Serial.println(" mm"); } delay(100); // Wait 100ms before the next reading }
Important Considerations and Best Practices
- Power Supply: Ensure the sensor is powered within its operating voltage range (2.6V to 3.5V). If using a 5V system, use a voltage regulator or level shifter for the I²C lines.
- Ambient Light: The sensor performs best in low ambient light conditions. Excessive light may reduce accuracy.
- Field of View: Objects outside the 25° field of view may not be detected accurately.
- Mounting: Avoid placing reflective surfaces directly in front of the sensor, as they may cause measurement errors.
Troubleshooting and FAQs
Common Issues and Solutions
Sensor Not Detected on I²C Bus:
- Ensure the
SDAandSCLlines are connected correctly. - Check for loose connections or damaged wires.
- Verify the I²C address of the sensor (default is
0x29).
- Ensure the
Incorrect Distance Measurements:
- Ensure there are no reflective surfaces near the sensor.
- Verify that the object is within the sensor's measurement range (30mm to 2000mm).
- Check for obstructions in the sensor's field of view.
Timeout Errors:
- Increase the timeout value in the code using
sensor.setTimeout(). - Ensure the sensor is not in shutdown mode (check the
XSHUTpin).
- Increase the timeout value in the code using
FAQs
Q: Can the VL53L0X measure distances beyond 2 meters?
A: No, the maximum measurement range of the VL53L0X is 2 meters. For longer ranges, consider using other ToF sensors like the VL53L1X.
Q: Can I use multiple VL53L0X sensors on the same I²C bus?
A: Yes, but you must assign a unique I²C address to each sensor. This can be done by toggling the XSHUT pin of each sensor during initialization.
Q: Is the VL53L0X affected by temperature changes?
A: The sensor includes temperature compensation, but extreme temperature variations may still affect accuracy slightly.
By following this documentation, you can effectively integrate and use the VL53L0X Flight Time Sensor in your projects.