How to Use UR3e Control Box: Examples, Pinouts, and Specs
Introduction
The UR3e Control Box, manufactured by Universal Robots, is the central unit responsible for controlling the UR3e robotic arm. It provides power, communication interfaces, and a platform for programming and operating the robotic arm. Designed for industrial and collaborative robotics applications, the UR3e Control Box ensures seamless integration and precise control of the UR3e robotic arm.
Explore Projects Built with UR3e Control Box


Explore Projects Built with UR3e Control Box
Common Applications and Use Cases
- Industrial Automation: Used in assembly lines, material handling, and packaging.
- Collaborative Robotics: Enables safe human-robot interaction in shared workspaces.
- Research and Development: Ideal for prototyping and testing robotic applications.
- Education and Training: Used in academic institutions for teaching robotics and automation.
Technical Specifications
Key Technical Details
| Parameter | Specification |
|---|---|
| Manufacturer | Universal Robots |
| Model | UR3e Control Box |
| Power Supply Input | 100-240 VAC, 50-60 Hz |
| Power Consumption | Maximum 200 W |
| Communication Interfaces | Ethernet, USB, Modbus TCP, Digital I/O |
| Operating Temperature | 0°C to 50°C |
| Dimensions | 475 mm x 423 mm x 268 mm |
| Weight | 12 kg |
| Safety Features | Emergency stop, protective stop, |
| configurable safety zones |
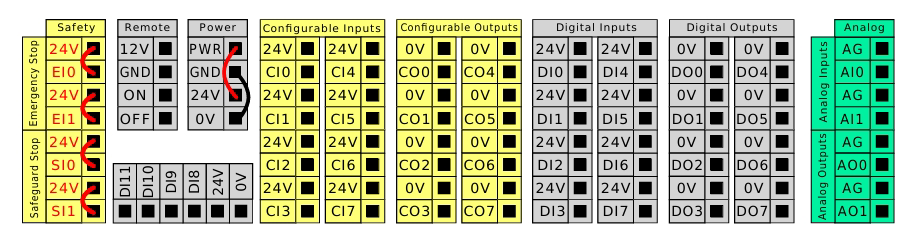
Pin Configuration and Descriptions
The UR3e Control Box features multiple ports for communication and control. Below is a summary of the key pin configurations:
Digital I/O Port
| Pin | Function | Description |
|---|---|---|
| 1 | Digital Input 1 | General-purpose input for sensors |
| 2 | Digital Input 2 | General-purpose input for sensors |
| 3 | Digital Output 1 | General-purpose output for actuators |
| 4 | Digital Output 2 | General-purpose output for actuators |
| 5 | Ground | Common ground for I/O signals |
Ethernet Port
| Pin | Function | Description |
|---|---|---|
| 1 | TX+ | Transmit data positive |
| 2 | TX- | Transmit data negative |
| 3 | RX+ | Receive data positive |
| 4 | RX- | Receive data negative |
Usage Instructions
How to Use the UR3e Control Box in a System
- Power Connection: Connect the control box to a 100-240 VAC power source using the provided power cable.
- Robotic Arm Connection: Use the supplied cable to connect the UR3e robotic arm to the control box.
- Communication Setup:
- Connect the Ethernet port to a PC or network for programming and monitoring.
- Use the USB port for firmware updates or additional peripherals.
- Programming:
- Use the Universal Robots Polyscope software to program the robotic arm.
- Alternatively, integrate the control box with external systems using Modbus TCP or digital I/O.
- Safety Configuration: Configure safety zones and emergency stop settings via the Polyscope interface.
Important Considerations and Best Practices
- Ensure the control box is placed in a well-ventilated area to prevent overheating.
- Use shielded cables for Ethernet and I/O connections to minimize electromagnetic interference.
- Regularly inspect cables and connectors for wear and tear to ensure reliable operation.
- Follow the manufacturer's guidelines for firmware updates to maintain compatibility and security.
Example: Connecting to an Arduino UNO
The UR3e Control Box can interface with an Arduino UNO via its digital I/O ports. Below is an example of how to control a digital output on the control box using the Arduino:
// Example: Controlling a UR3e digital output using Arduino UNO
// This code sends a HIGH signal to Digital Output 1 on the UR3e Control Box
const int ur3eOutputPin = 7; // Arduino pin connected to UR3e Digital Output 1
void setup() {
pinMode(ur3eOutputPin, OUTPUT); // Set the pin as an output
}
void loop() {
digitalWrite(ur3eOutputPin, HIGH); // Turn on the UR3e output
delay(1000); // Wait for 1 second
digitalWrite(ur3eOutputPin, LOW); // Turn off the UR3e output
delay(1000); // Wait for 1 second
}
Note: Ensure proper voltage level shifting if the Arduino operates at 5V logic and the UR3e Control Box requires 24V signals.
Troubleshooting and FAQs
Common Issues and Solutions
Issue: The UR3e Control Box does not power on.
- Solution: Verify the power cable is securely connected and the power source is active. Check the fuse inside the control box.
Issue: Communication with the robotic arm is lost.
- Solution: Ensure the cable between the control box and the robotic arm is securely connected. Check for any physical damage to the cable.
Issue: Digital I/O signals are not functioning.
- Solution: Verify the I/O configuration in the Polyscope software. Check the connected devices for proper operation.
Issue: Overheating of the control box.
- Solution: Ensure the control box is placed in a well-ventilated area and not exposed to direct sunlight.
FAQs
Q: Can the UR3e Control Box be used with other robotic arms?
- A: No, the UR3e Control Box is specifically designed for the UR3e robotic arm and is not compatible with other models.
Q: What programming languages are supported?
- A: The UR3e supports programming via Polyscope, as well as external control using Python, C++, and other languages through the URScript API.
Q: How do I update the firmware?
- A: Firmware updates can be performed via the USB port using a USB drive containing the update file. Follow the instructions provided by Universal Robots.
Q: Is the control box compatible with third-party sensors?
- A: Yes, the digital I/O ports can interface with third-party sensors, provided they meet the voltage and current requirements.
This concludes the documentation for the UR3e Control Box. For further assistance, refer to the official Universal Robots user manual or contact their support team.