How to Use Pixhawk Px4 Front: Examples, Pinouts, and Specs

Introduction
The Pixhawk Px4 Front, manufactured by 3D Robotics (Part ID: PX4), is a high-performance flight control hardware designed for drones and other unmanned vehicles. It serves as the central processing unit for autonomous navigation, stabilization, and control. Equipped with advanced sensors and robust processing capabilities, the Pixhawk Px4 Front supports a wide range of autopilot software, including PX4 and ArduPilot, making it a versatile choice for hobbyists, researchers, and commercial applications.
Explore Projects Built with Pixhawk Px4 Front

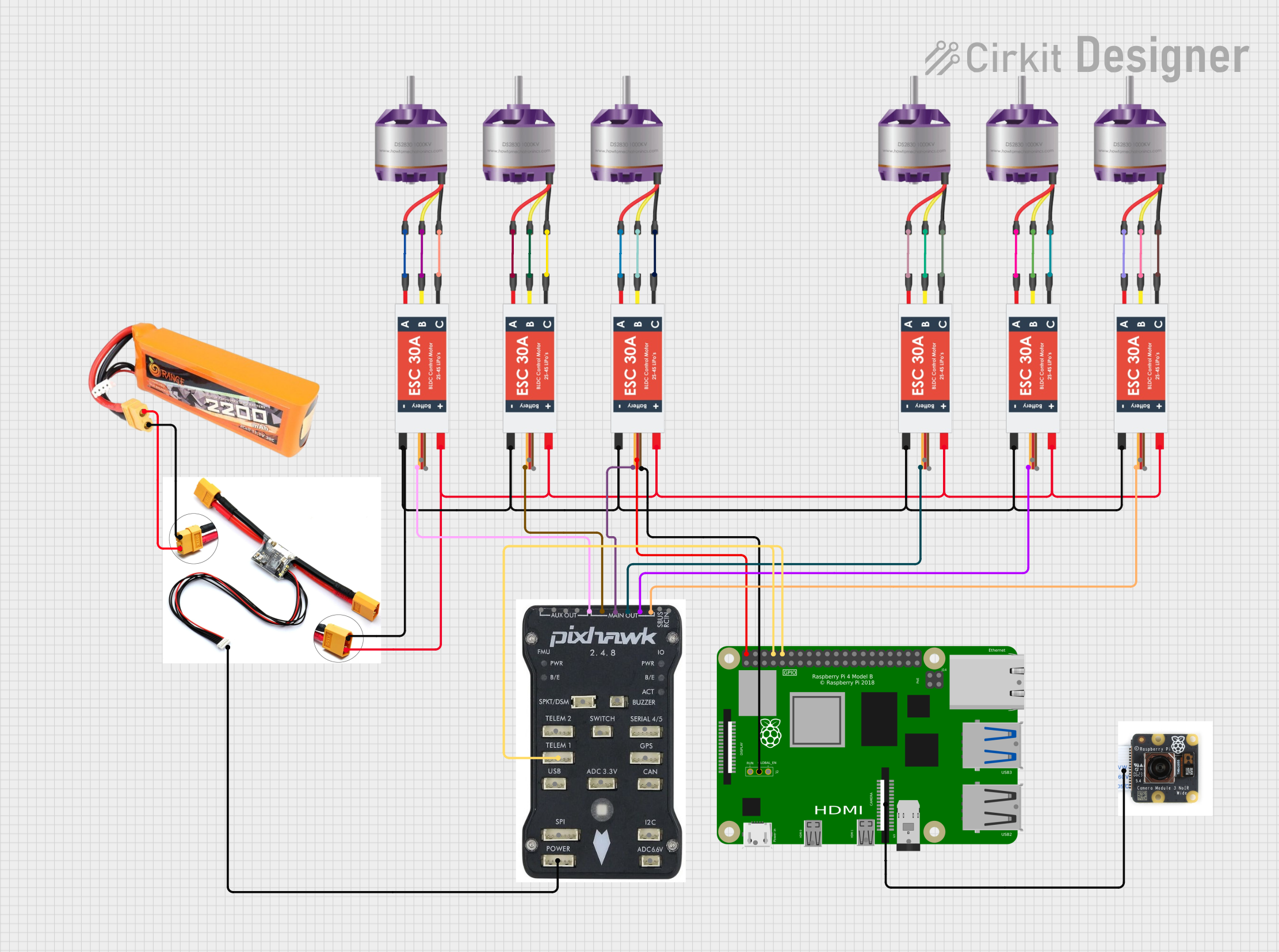
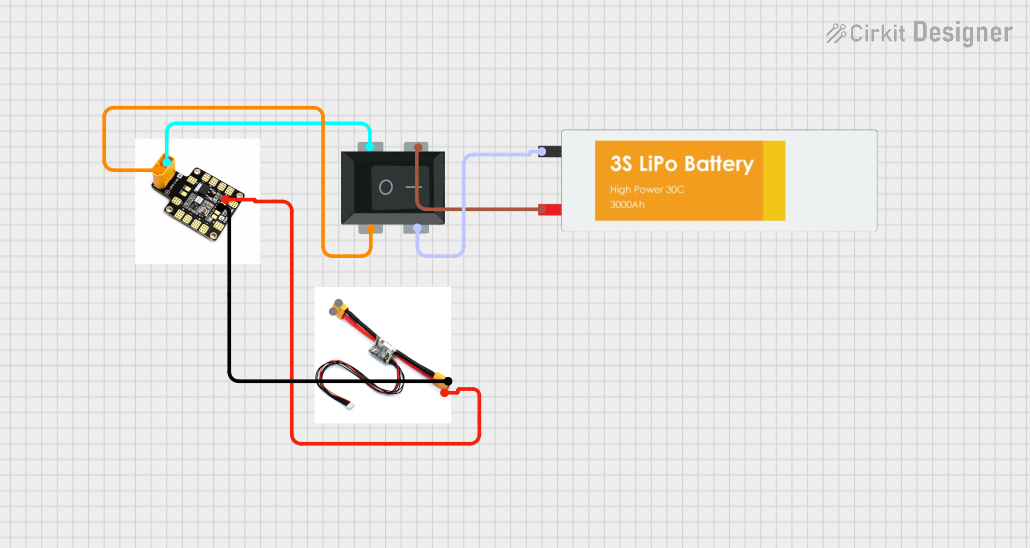
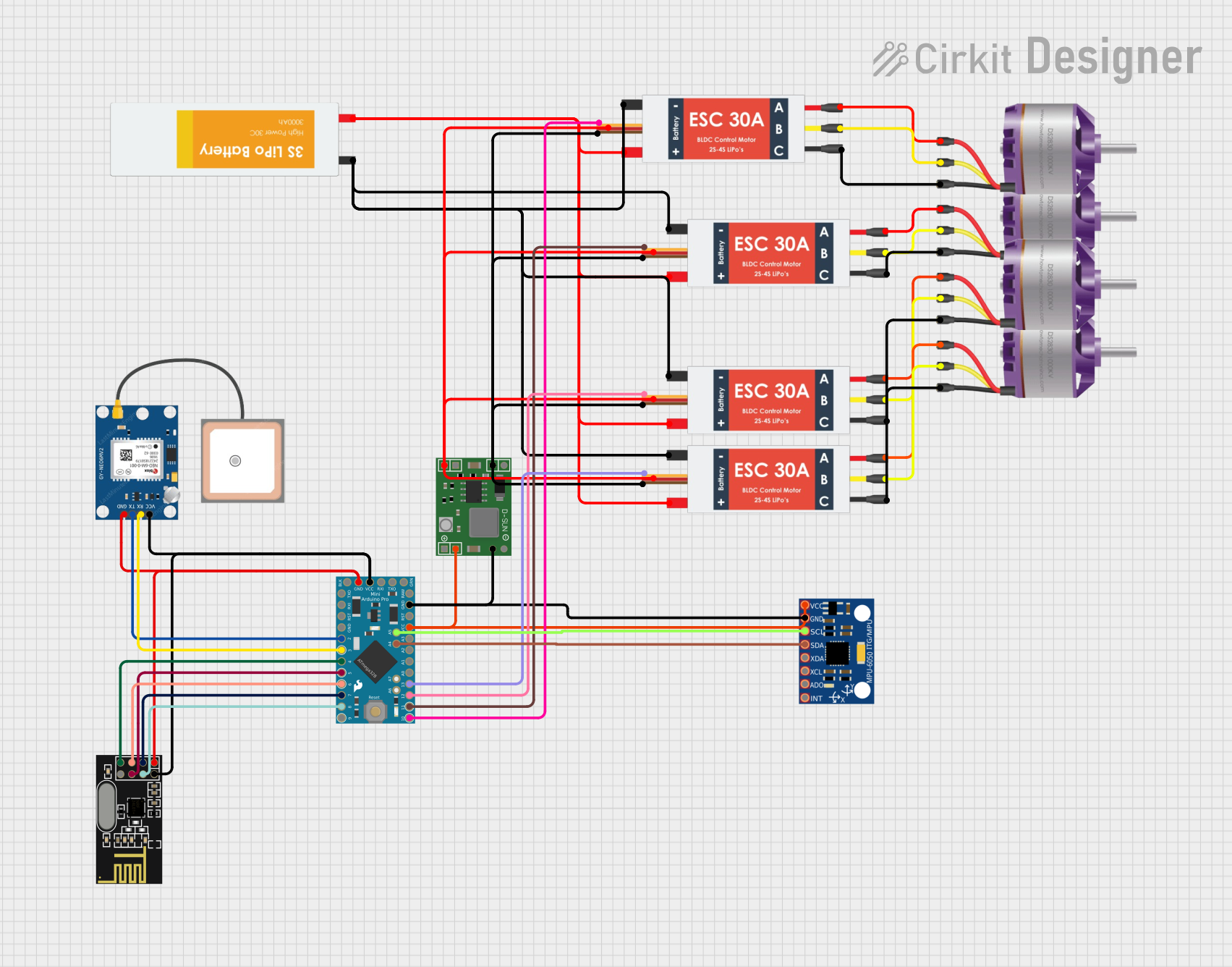
Explore Projects Built with Pixhawk Px4 Front
Common Applications and Use Cases
- Autonomous drones for aerial photography and videography
- Unmanned ground vehicles (UGVs) for research and exploration
- Fixed-wing and rotary-wing UAVs for mapping and surveying
- Robotics and academic projects requiring precise motion control
- Industrial applications such as delivery drones and inspection systems
Technical Specifications
Key Technical Details
| Parameter | Specification |
|---|---|
| Processor | 32-bit ARM Cortex-M4F, 168 MHz |
| Co-Processor | 32-bit STM32F103 |
| Sensors | 3-axis accelerometer, gyroscope, magnetometer, barometer |
| Input Voltage Range | 4.1V to 5.7V |
| Power Consumption | 280 mA @ 5V (typical) |
| Communication Interfaces | UART, I2C, CAN, SPI, USB |
| Supported Software | PX4, ArduPilot |
| Dimensions | 50mm x 81.5mm x 15.5mm |
| Weight | 38 grams |
Pin Configuration and Descriptions
The Pixhawk Px4 Front features multiple connectors for peripherals, sensors, and power. Below is a summary of the key pin configurations:
Power Input
| Pin Name | Description |
|---|---|
| VDD_5V | Main power input (4.1V to 5.7V) |
| GND | Ground connection |
I/O Ports
| Port Name | Pin Name | Description |
|---|---|---|
| TELEM1 | TX, RX | Telemetry port 1 for communication |
| TELEM2 | TX, RX | Telemetry port 2 for communication |
| GPS | TX, RX, GND | GPS module connection |
| I2C | SCL, SDA | I2C bus for external sensors |
| CAN | CAN_H, CAN_L | CAN bus for advanced peripherals |
PWM Outputs
| Pin Name | Description |
|---|---|
| PWM1-8 | Motor/servo control signals |
| GND | Ground connection |
USB Interface
| Pin Name | Description |
|---|---|
| USB_D+ | USB data positive |
| USB_D- | USB data negative |
| GND | Ground connection |
Usage Instructions
How to Use the Pixhawk Px4 Front in a Circuit
- Powering the Pixhawk: Connect a regulated 5V power supply to the VDD_5V pin. Ensure the power source can provide sufficient current for the connected peripherals.
- Connecting Peripherals:
- Attach a GPS module to the GPS port for navigation.
- Connect telemetry radios to TELEM1 or TELEM2 for remote communication.
- Use the I2C port to connect external sensors like rangefinders or airspeed sensors.
- Motor and Servo Connections: Connect ESCs or servos to the PWM output pins (PWM1-8). Ensure proper calibration of ESCs before flight.
- Software Setup:
- Install the PX4 or ArduPilot firmware using the QGroundControl or Mission Planner software.
- Configure the flight parameters, calibrate sensors, and set up the vehicle type (e.g., quadcopter, fixed-wing).
- Testing: Perform a pre-flight check to ensure all sensors, motors, and communication links are functioning correctly.
Important Considerations and Best Practices
- Power Supply: Use a stable power source to avoid voltage drops that may cause the Pixhawk to reboot mid-operation.
- Firmware Updates: Regularly update the firmware to access new features and bug fixes.
- Sensor Calibration: Always calibrate the accelerometer, gyroscope, and compass before the first use or after significant temperature changes.
- Safety: Test the system in a controlled environment before deploying it in real-world applications.
Example Code for Arduino UNO Integration
The Pixhawk Px4 Front can communicate with an Arduino UNO via the UART interface. Below is an example code snippet for reading telemetry data:
#include <SoftwareSerial.h>
// Define RX and TX pins for communication with Pixhawk
#define RX_PIN 10
#define TX_PIN 11
// Initialize SoftwareSerial for Pixhawk communication
SoftwareSerial pixhawkSerial(RX_PIN, TX_PIN);
void setup() {
// Start serial communication with Pixhawk
pixhawkSerial.begin(57600); // Pixhawk default baud rate
Serial.begin(9600); // Serial monitor baud rate
Serial.println("Pixhawk-Arduino Communication Initialized");
}
void loop() {
// Check if data is available from Pixhawk
if (pixhawkSerial.available()) {
// Read and print data from Pixhawk
char data = pixhawkSerial.read();
Serial.print(data);
}
}
Troubleshooting and FAQs
Common Issues and Solutions
Pixhawk Not Powering On:
- Cause: Insufficient or unstable power supply.
- Solution: Verify the input voltage is within the 4.1V to 5.7V range. Use a reliable power source.
No Communication with Telemetry Radios:
- Cause: Incorrect baud rate or wiring.
- Solution: Ensure the baud rate matches the telemetry module settings. Double-check the TX and RX connections.
GPS Not Detected:
- Cause: Loose connection or incompatible GPS module.
- Solution: Verify the GPS module is connected to the correct port. Check compatibility with the Pixhawk.
Motors Not Responding:
- Cause: Incorrect PWM connections or ESC calibration.
- Solution: Ensure the ESCs are connected to the correct PWM pins. Calibrate the ESCs using the autopilot software.
FAQs
Q: Can the Pixhawk Px4 Front be used with fixed-wing aircraft?
A: Yes, it supports multiple vehicle types, including fixed-wing, rotary-wing, and VTOL aircraft.Q: What software is compatible with the Pixhawk Px4 Front?
A: The Pixhawk Px4 Front supports PX4 and ArduPilot firmware.Q: How do I update the firmware?
A: Use QGroundControl or Mission Planner to download and install the latest firmware.Q: Can I connect multiple sensors to the I2C port?
A: Yes, the I2C bus supports multiple devices, but ensure each device has a unique address.
This documentation provides a comprehensive guide to using the Pixhawk Px4 Front effectively. For further assistance, refer to the official 3D Robotics support resources.