How to Use VL53L0X Time-of-Flight (TOF) Laser distance sensor: Examples, Pinouts, and Specs
Introduction
The VL53L0X is a compact and highly accurate Time-of-Flight (TOF) laser distance sensor manufactured by Dieser Artikel. It uses laser light to measure distances with exceptional precision and speed. The sensor is capable of measuring absolute distances up to 2 meters, making it ideal for applications requiring precise ranging and obstacle detection.
Explore Projects Built with VL53L0X Time-of-Flight (TOF) Laser distance sensor
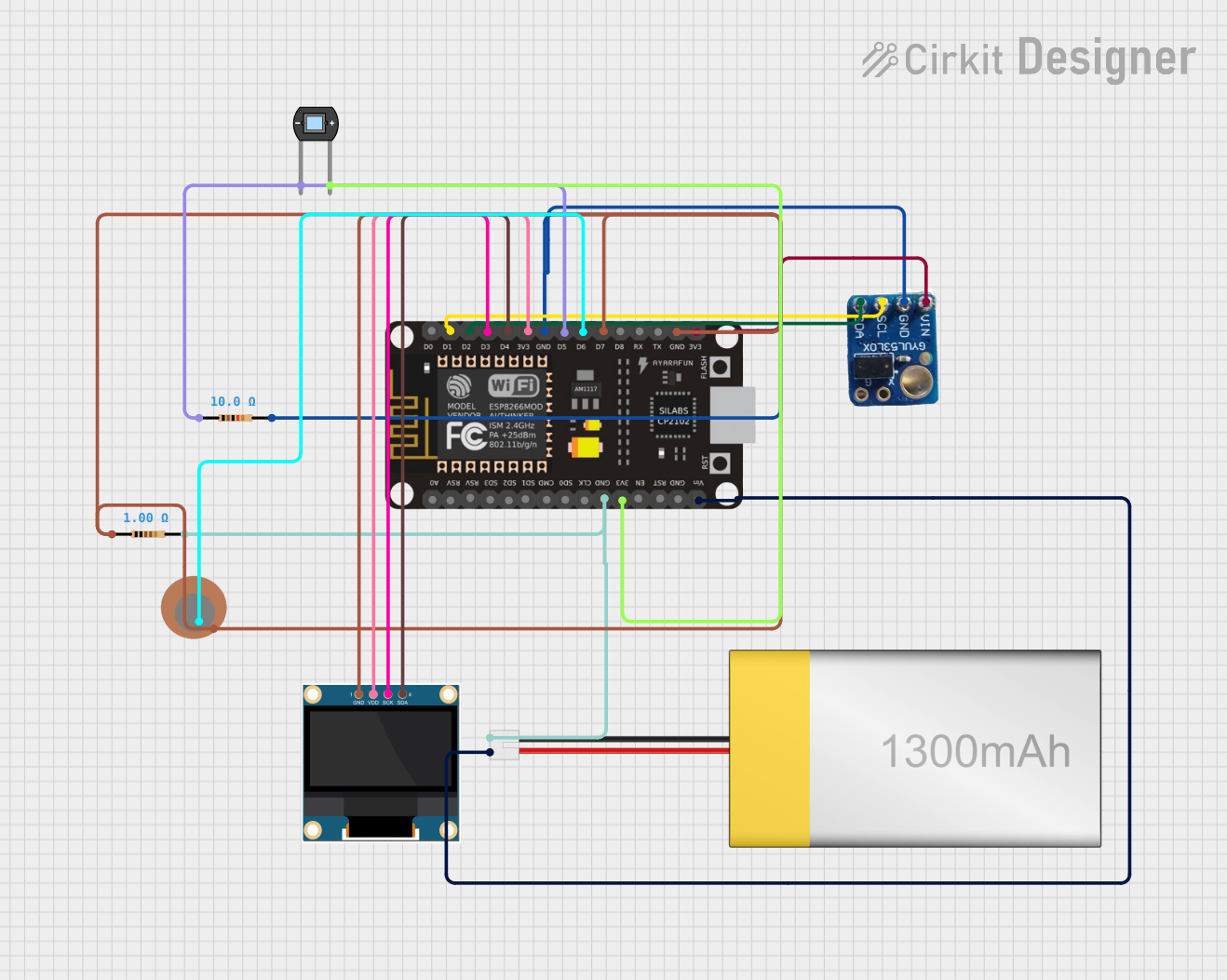
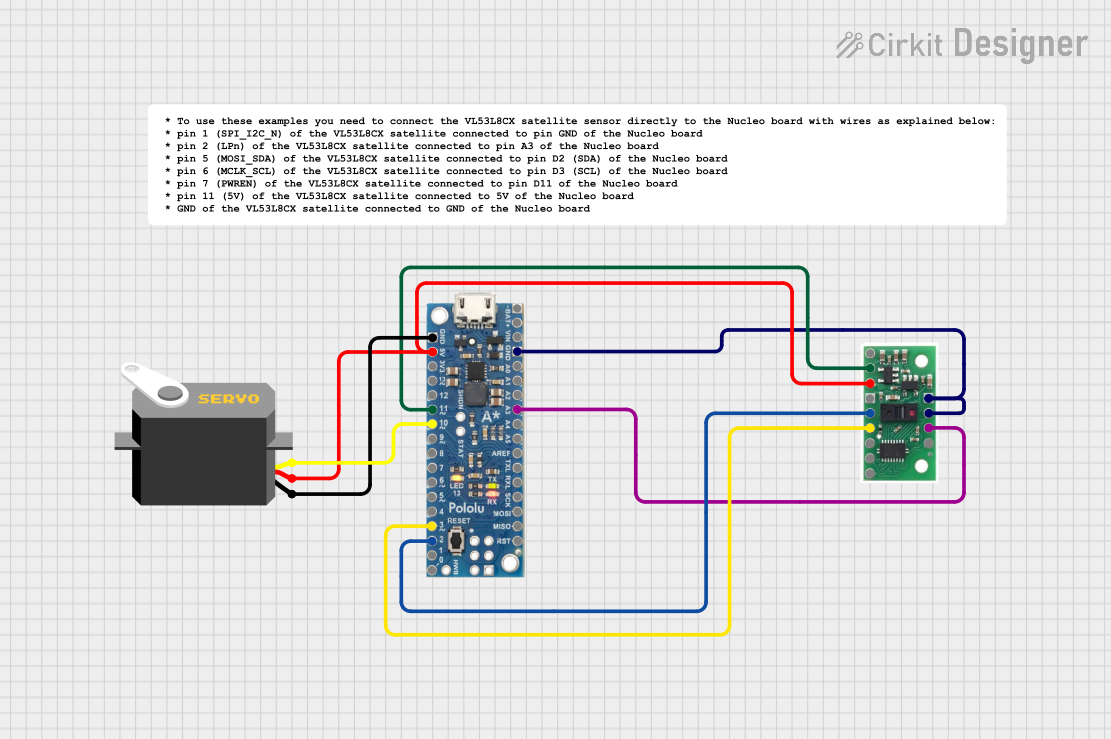
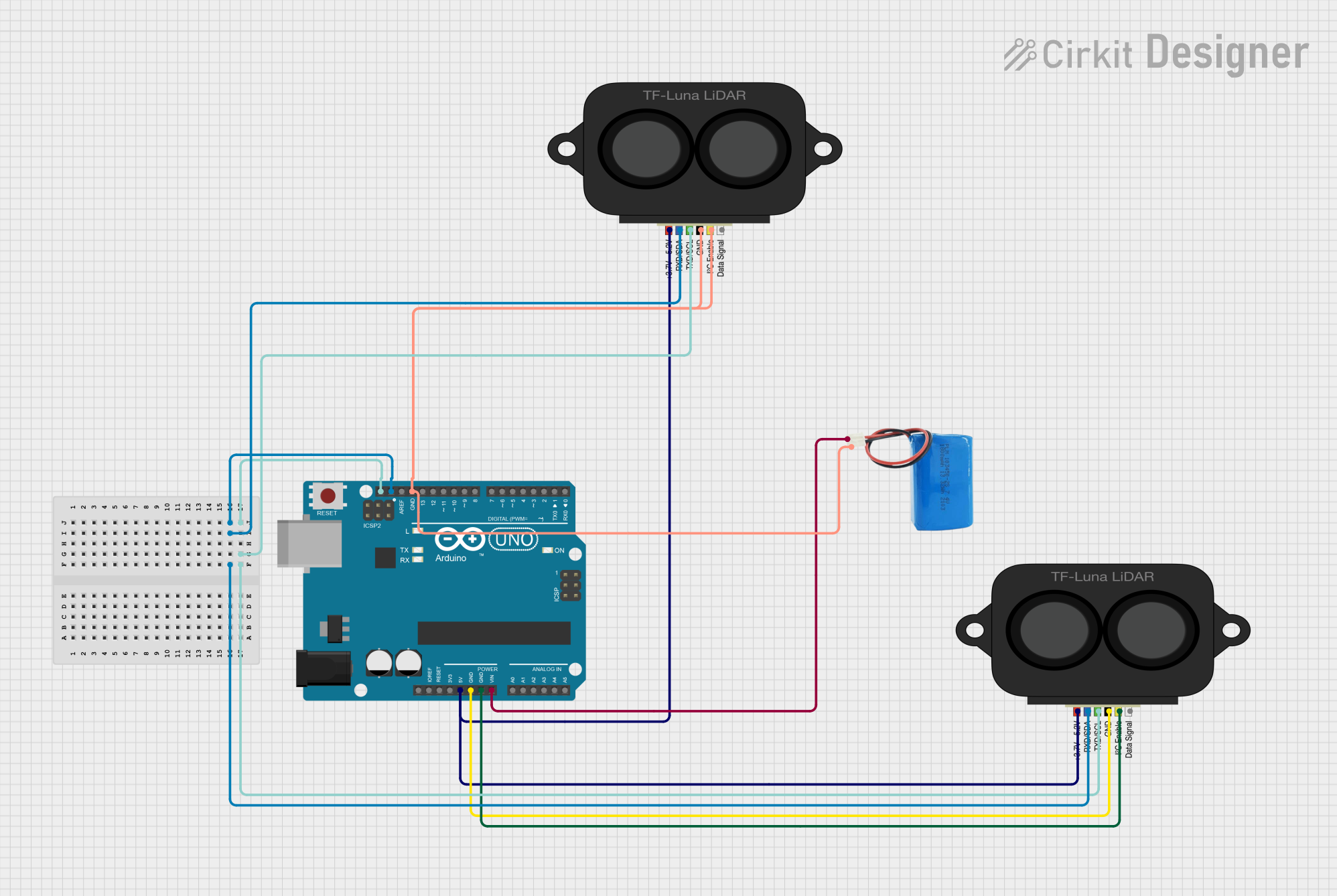
Explore Projects Built with VL53L0X Time-of-Flight (TOF) Laser distance sensor
Common Applications and Use Cases
- Robotics for obstacle detection and navigation
- Drones for altitude measurement and collision avoidance
- Industrial automation for object detection
- Consumer electronics for gesture recognition
- IoT devices for proximity sensing
Technical Specifications
The VL53L0X sensor is designed for ease of integration and high performance. Below are its key technical details:
| Parameter | Value |
|---|---|
| Operating Voltage | 2.6V to 3.5V |
| Communication Interface | I²C |
| Measurement Range | 30mm to 2000mm |
| Accuracy | ±3% (typical) |
| Field of View (FoV) | 25° |
| Operating Temperature | -20°C to +70°C |
| Power Consumption | 20mW (typical) |
| Dimensions | 4.4mm x 2.4mm x 1.0mm |
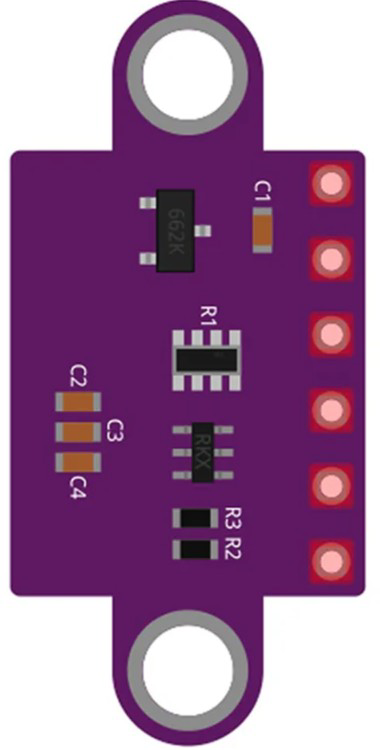
Pin Configuration and Descriptions
The VL53L0X sensor typically comes in a breakout board format with the following pinout:
| Pin Name | Description |
|---|---|
| VIN | Power supply input (2.6V to 5V) |
| GND | Ground |
| SDA | I²C data line |
| SCL | I²C clock line |
| XSHUT | Shutdown pin (active low) |
| GPIO1 | Interrupt output (optional, configurable) |
Usage Instructions
The VL53L0X sensor is straightforward to use in a circuit, especially with microcontrollers like the Arduino UNO. Below are the steps to integrate and use the sensor:
Connecting the VL53L0X to an Arduino UNO
- Power Supply: Connect the
VINpin to the Arduino's5Vpin andGNDto the Arduino'sGND. - I²C Communication: Connect the
SDApin to the Arduino'sA4pin and theSCLpin to the Arduino'sA5pin. - Optional Pins: The
XSHUTpin can be used to reset the sensor, and theGPIO1pin can be used for interrupts if needed.
Sample Arduino Code
Below is an example Arduino sketch to read distance measurements from the VL53L0X sensor using the Adafruit VL53L0X library:
#include <Wire.h>
#include <Adafruit_VL53L0X.h>
// Create an instance of the VL53L0X sensor
Adafruit_VL53L0X lox = Adafruit_VL53L0X();
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
Serial.println("VL53L0X Test");
// Initialize the sensor
if (!lox.begin()) {
Serial.println("Failed to initialize VL53L0X sensor!");
while (1); // Halt execution if initialization fails
}
}
void loop() {
VL53L0X_RangingMeasurementData_t measure;
// Perform a ranging measurement
lox.rangingTest(&measure, false);
// Check if the measurement is valid
if (measure.RangeStatus != 4) { // 4 indicates an out-of-range error
Serial.print("Distance (mm): ");
Serial.println(measure.RangeMilliMeter);
} else {
Serial.println("Out of range");
}
delay(100); // Wait 100ms before the next measurement
}
Important Considerations and Best Practices
- Power Supply: Ensure the sensor is powered within its operating voltage range (2.6V to 3.5V). If using a 5V microcontroller, use a level shifter for the I²C lines.
- I²C Address: The default I²C address of the VL53L0X is
0x29. If using multiple sensors, you must configure unique addresses for each. - Ambient Light: Avoid direct exposure to strong ambient light sources, as they may interfere with the sensor's accuracy.
- Mounting: Ensure the sensor is mounted securely and aligned properly for accurate measurements.
Troubleshooting and FAQs
Common Issues and Solutions
Sensor Not Detected on I²C Bus
- Ensure the
SDAandSCLlines are connected correctly. - Check for proper pull-up resistors on the I²C lines (typically 4.7kΩ).
- Verify the sensor's power supply voltage.
- Ensure the
Incorrect or Fluctuating Distance Measurements
- Ensure there are no reflective surfaces near the sensor that could cause interference.
- Check for obstructions in the sensor's field of view.
- Verify that the sensor is not exposed to excessive ambient light.
Out-of-Range Errors
- Ensure the target object is within the sensor's measurement range (30mm to 2000mm).
- Verify that the target surface is not too dark or absorbent, as this can reduce reflectivity.
FAQs
Q: Can the VL53L0X measure distances through transparent materials?
A: No, the sensor cannot measure distances through transparent materials like glass, as the laser light is either refracted or absorbed.
Q: How can I use multiple VL53L0X sensors on the same I²C bus?
A: Use the XSHUT pin to reset each sensor individually and assign a unique I²C address to each one during initialization.
Q: What is the maximum update rate of the VL53L0X?
A: The sensor can achieve an update rate of up to 50Hz, depending on the measurement mode and conditions.
By following this documentation, you can effectively integrate and use the VL53L0X sensor in your projects.