How to Use F450 V2 FC : Examples, Pinouts, and Specs
Introduction
The F450 V2 Flight Controller (FC), manufactured by Aero Selfie (Part ID: F405 V2 FC), is a compact and lightweight control unit designed specifically for multirotor drones. It serves as the brain of the drone, providing stabilization, control, and advanced flight features. This flight controller is equipped with GPS support, telemetry capabilities, and multiple flight modes, making it an excellent choice for both hobbyists and professional drone enthusiasts.
Explore Projects Built with F450 V2 FC



Explore Projects Built with F450 V2 FC
Common Applications and Use Cases
- Multirotor Drones: Used in quadcopters, hexacopters, and other multirotor configurations.
- Aerial Photography and Videography: Ensures stable flight for capturing high-quality images and videos.
- FPV (First-Person View) Racing: Provides precise control and responsiveness for competitive drone racing.
- Autonomous Flight: Supports GPS-based navigation for waypoint missions and return-to-home functionality.
- Research and Development: Ideal for prototyping and testing new drone technologies.
Technical Specifications
Key Technical Details
| Parameter | Specification |
|---|---|
| Processor | STM32F405 (32-bit ARM Cortex-M4) |
| Input Voltage Range | 7V - 26V (2S to 6S LiPo battery) |
| IMU (Inertial Measurement Unit) | MPU6000 (6-axis gyro and accelerometer) |
| GPS Support | Yes (UART interface) |
| Telemetry | Supported (via UART or dedicated telemetry port) |
| Flight Modes | Stabilize, Altitude Hold, GPS Hold, Acro, etc. |
| Dimensions | 36mm x 36mm (standard 30.5mm x 30.5mm mounting holes) |
| Weight | 8 grams |
| Firmware Compatibility | Betaflight, iNav, Cleanflight |
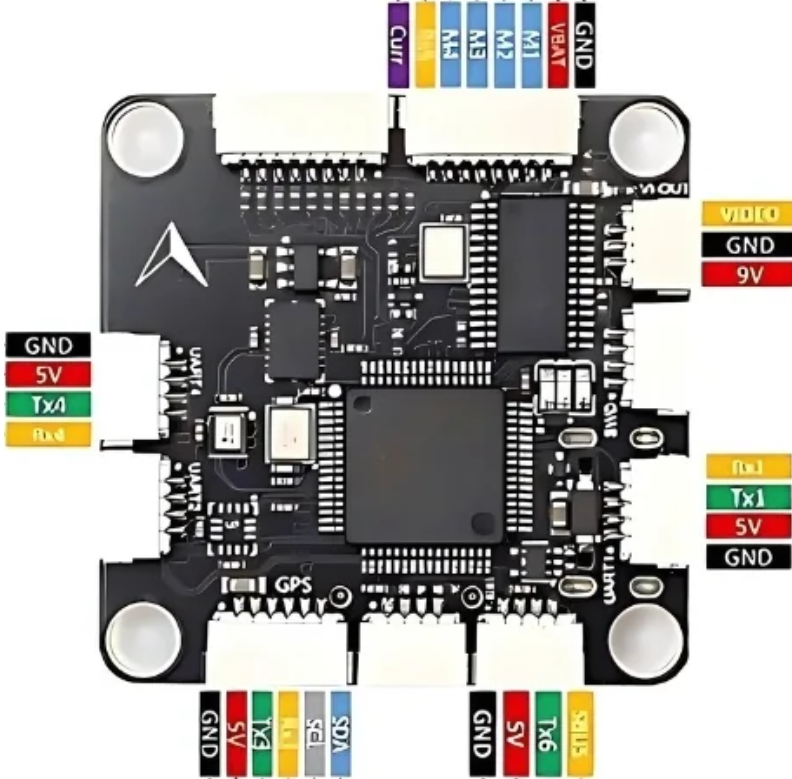
Pin Configuration and Descriptions
| Pin Name | Description |
|---|---|
| GND | Ground connection for power and signal reference. |
| 5V | 5V output for powering external peripherals (e.g., GPS module, receiver). |
| VBAT | Battery voltage input (7V - 26V). |
| UART1 (TX/RX) | Serial communication port for GPS or telemetry modules. |
| UART2 (TX/RX) | Additional serial port for peripherals (e.g., receiver, telemetry). |
| PWM1 - PWM8 | Motor outputs for ESCs (Electronic Speed Controllers). |
| I2C (SCL/SDA) | I2C interface for external sensors (e.g., barometer, magnetometer). |
| Buzzer | Connection for an external buzzer for alerts and notifications. |
| LED | Addressable LED output for visual feedback. |
Usage Instructions
How to Use the F450 V2 FC in a Circuit
Powering the Flight Controller:
- Connect the VBAT pin to the positive terminal of your LiPo battery (2S to 6S).
- Ensure the GND pin is connected to the battery's ground terminal.
Connecting Motors and ESCs:
- Connect the signal wires of your ESCs to the PWM1 - PWM8 pins, depending on the number of motors.
- Ensure the ESCs are powered separately and share a common ground with the flight controller.
Adding Peripherals:
- Connect a GPS module to the UART1 port (TX to RX and RX to TX).
- Attach a telemetry module to UART2 for real-time flight data.
- Use the I2C interface for additional sensors like a barometer or magnetometer.
Flashing Firmware:
- Download compatible firmware (e.g., Betaflight) and use a USB cable to connect the flight controller to your computer.
- Use the Betaflight Configurator software to flash the firmware and configure the flight controller.
Calibrating the Flight Controller:
- Perform accelerometer and gyro calibration using the configuration software.
- Set up the desired flight modes and configure the receiver inputs.
Important Considerations and Best Practices
- Power Supply: Ensure the input voltage is within the specified range (7V - 26V) to avoid damage.
- Firmware Updates: Always use the latest firmware version for optimal performance and bug fixes.
- ESC Calibration: Calibrate your ESCs to ensure synchronized motor operation.
- Vibration Dampening: Mount the flight controller on vibration-dampening pads to reduce noise in sensor readings.
- Pre-Flight Checks: Verify all connections, calibrations, and configurations before flying.
Example Code for Arduino UNO (Telemetry Integration)
#include <SoftwareSerial.h>
// Define pins for telemetry communication
SoftwareSerial telemetrySerial(10, 11); // RX, TX
void setup() {
// Initialize serial communication
Serial.begin(9600); // For debugging
telemetrySerial.begin(57600); // For telemetry module
Serial.println("Telemetry communication initialized.");
}
void loop() {
// Check for incoming telemetry data
if (telemetrySerial.available()) {
String telemetryData = telemetrySerial.readString();
Serial.println("Telemetry Data: " + telemetryData);
}
// Send data to telemetry module
telemetrySerial.println("Hello from Arduino!");
delay(1000); // Delay for 1 second
}
Note: Ensure the telemetry module is connected to the Arduino's RX and TX pins as defined in the code.
Troubleshooting and FAQs
Common Issues and Solutions
Flight Controller Not Powering On:
- Cause: Incorrect wiring or insufficient voltage.
- Solution: Verify the VBAT and GND connections. Ensure the battery voltage is within the 7V - 26V range.
Motors Not Spinning:
- Cause: ESCs not calibrated or incorrect PWM connections.
- Solution: Calibrate the ESCs using the configuration software and check the PWM pin connections.
Unstable Flight:
- Cause: Incorrect PID settings or uncalibrated sensors.
- Solution: Tune the PID values in the firmware and recalibrate the accelerometer and gyro.
No GPS Lock:
- Cause: Poor GPS signal or incorrect UART configuration.
- Solution: Ensure the GPS module has a clear view of the sky and is connected to the correct UART port.
Telemetry Not Working:
- Cause: Incorrect baud rate or wiring.
- Solution: Verify the baud rate settings in the firmware and check the TX/RX connections.
FAQs
Q: Can I use the F450 V2 FC with a fixed-wing aircraft?
A: Yes, the flight controller supports fixed-wing configurations with compatible firmware.Q: What firmware is recommended for beginners?
A: Betaflight is user-friendly and widely supported, making it ideal for beginners.Q: How do I update the firmware?
A: Use the Betaflight Configurator software to flash the latest firmware via USB.Q: Can I use this flight controller with a 1S battery?
A: No, the minimum input voltage is 7V, which corresponds to a 2S LiPo battery.Q: Is the F450 V2 FC compatible with DJI drones?
A: It is not directly compatible with DJI systems but can be integrated with custom builds.
This concludes the documentation for the F450 V2 Flight Controller. For further assistance, refer to the manufacturer's user manual or support resources.