How to Use F405 V4 Flight Controller: Examples, Pinouts, and Specs
Introduction
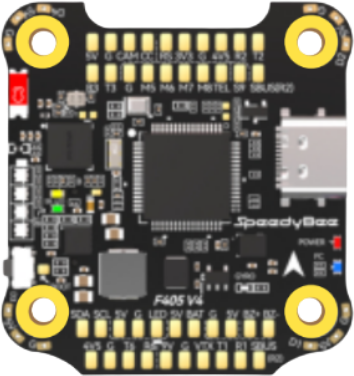
The SpeedyBee F405 V4 Flight Controller is a compact and powerful flight controller designed specifically for multirotors and drones. It features an advanced F4 processor, a built-in On-Screen Display (OSD), and support for a wide range of flight modes and sensors. This flight controller is ideal for both hobbyists and professionals looking to build high-performance drones with precise control and reliable operation.
Explore Projects Built with F405 V4 Flight Controller




Explore Projects Built with F405 V4 Flight Controller
Common Applications and Use Cases
- Multirotor Drones: Suitable for quadcopters, hexacopters, and other multirotor configurations.
- FPV Racing: Optimized for fast response times and low latency, making it ideal for FPV (First-Person View) racing drones.
- Aerial Photography: Provides stable flight control for drones used in photography and videography.
- Autonomous Drones: Compatible with GPS modules and other sensors for autonomous flight capabilities.
Technical Specifications
Key Technical Details
- Processor: STM32F405 (F4 series) with 168 MHz clock speed.
- IMU (Inertial Measurement Unit): MPU6000 (6-axis gyro and accelerometer).
- OSD: Built-in Betaflight OSD for real-time telemetry display.
- Input Voltage: 3S–6S LiPo (9V–30V).
- BEC Output: 5V/2A and 9V/2A for powering peripherals.
- UART Ports: 5 UARTs for connecting peripherals like GPS, receivers, and telemetry modules.
- Flash Memory: 16 MB Blackbox for flight data logging.
- ESC Protocols: Supports DShot, ProShot, and PWM.
- Dimensions: 36 mm x 36 mm (30.5 mm x 30.5 mm mounting holes).
- Weight: 7.5 grams.
Pin Configuration and Descriptions
The F405 V4 Flight Controller features a variety of pins for connecting peripherals. Below is the pinout description:
| Pin Name | Description |
|---|---|
| GND | Ground connection for power and peripherals. |
| VBAT | Voltage input for the flight controller (connect to LiPo battery). |
| 5V | 5V output for powering peripherals (e.g., receiver, GPS). |
| 9V | 9V output for powering FPV cameras or VTX (Video Transmitter). |
| RX1/TX1 | UART1 for connecting receivers or telemetry modules. |
| RX2/TX2 | UART2 for GPS or other peripherals. |
| RX3/TX3 | UART3 for additional peripherals. |
| RX4/TX4 | UART4 for peripherals like smart audio or ESC telemetry. |
| RX5/TX5 | UART5 for additional devices. |
| M1–M4 | Motor outputs for ESCs (Electronic Speed Controllers). |
| LED | Addressable LED strip output (e.g., WS2812). |
| Buzzer | Buzzer output for audible alerts. |
| Boot | Bootloader pin for firmware flashing. |
| RSSI | Analog input for receiver signal strength indication. |
| Current | Current sensor input for monitoring power consumption. |
| SCL/SDA | I2C interface for external sensors (e.g., barometer, magnetometer). |
Usage Instructions
How to Use the F405 V4 Flight Controller in a Circuit
Powering the Flight Controller:
- Connect the VBAT pin to the positive terminal of a 3S–6S LiPo battery.
- Ensure the GND pin is connected to the battery's ground.
Connecting Motors and ESCs:
- Connect the signal wires of your ESCs to the M1–M4 motor output pins.
- Ensure the ESCs are powered separately or through the flight controller's power distribution board (if applicable).
Connecting Peripherals:
- Use the UART ports (RX/TX) to connect devices like GPS modules, telemetry radios, or smart audio.
- Connect your FPV camera and VTX to the 9V and GND pins for power, and route the video signal through the OSD.
Flashing Firmware:
- Use the Boot pin to enter bootloader mode for firmware updates.
- Flash the latest Betaflight firmware using the Betaflight Configurator software.
Configuring the Flight Controller:
- Connect the flight controller to your computer via USB.
- Open Betaflight Configurator and configure settings such as PID tuning, flight modes, and receiver mapping.
Important Considerations and Best Practices
- Voltage Compatibility: Ensure your LiPo battery voltage is within the supported range (3S–6S).
- Heat Management: Avoid overheating by ensuring proper airflow around the flight controller.
- Firmware Updates: Always use the latest firmware version for optimal performance and bug fixes.
- Wiring: Double-check all connections to avoid short circuits or incorrect wiring.
- Calibration: Calibrate the accelerometer and other sensors before the first flight.
Example: Connecting to an Arduino UNO
The F405 V4 can communicate with an Arduino UNO via UART for custom applications. Below is an example Arduino sketch to read telemetry data:
#include <SoftwareSerial.h>
// Define RX and TX pins for SoftwareSerial
#define RX_PIN 10 // Connect to TX pin of F405 V4
#define TX_PIN 11 // Connect to RX pin of F405 V4
SoftwareSerial flightControllerSerial(RX_PIN, TX_PIN);
void setup() {
// Initialize serial communication
Serial.begin(9600); // For debugging via Serial Monitor
flightControllerSerial.begin(115200); // Match the baud rate of the F405 V4
Serial.println("Arduino connected to F405 V4 Flight Controller");
}
void loop() {
// Check if data is available from the flight controller
if (flightControllerSerial.available()) {
String telemetryData = flightControllerSerial.readString();
Serial.println("Telemetry Data: " + telemetryData);
}
// Optional: Send commands to the flight controller
// flightControllerSerial.println("Example Command");
}
Troubleshooting and FAQs
Common Issues and Solutions
Flight Controller Not Powering On:
- Solution: Check the VBAT and GND connections. Ensure the battery voltage is within the supported range (9V–30V).
No Communication with Betaflight Configurator:
- Solution: Ensure the correct USB drivers are installed. Use a data-capable USB cable and verify the COM port in Betaflight Configurator.
Motors Not Spinning:
- Solution: Verify motor connections to the M1–M4 pins. Check ESC calibration and ensure the correct motor protocol is selected in Betaflight.
OSD Not Displaying:
- Solution: Ensure the FPV camera and VTX are properly connected to the 9V and GND pins. Verify OSD settings in Betaflight Configurator.
Receiver Not Detected:
- Solution: Confirm the receiver is connected to the correct UART port (e.g., RX1/TX1). Check receiver protocol settings in Betaflight.
FAQs
Q: Can I use a 2S LiPo battery with the F405 V4?
A: No, the minimum supported voltage is 9V (3S LiPo).Q: Does the F405 V4 support GPS modules?
A: Yes, GPS modules can be connected via UART ports (e.g., RX2/TX2).Q: How do I reset the flight controller to factory settings?
A: Use the "Reset Settings" option in Betaflight Configurator or typedefaultsin the CLI.Q: Can I use this flight controller for fixed-wing aircraft?
A: Yes, the F405 V4 supports fixed-wing configurations in Betaflight.
This concludes the documentation for the SpeedyBee F405 V4 Flight Controller.