How to Use Tb6612Fng Doble Puente H: Examples, Pinouts, and Specs
Introduction
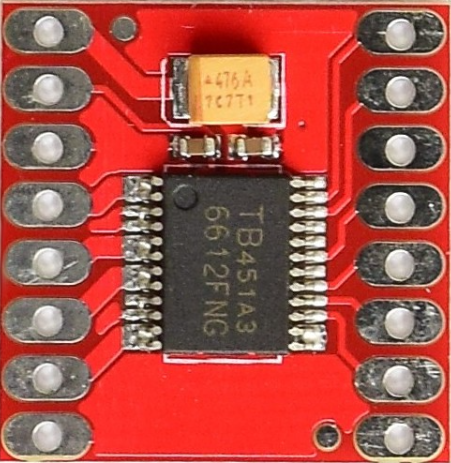
The TB6612FNG is a dual H-bridge motor driver IC manufactured by Genérico. It is designed to control two DC motors or one stepper motor with high efficiency and precision. This component is widely used in robotics, automation, and other motor control applications due to its compact size, ease of use, and robust features.
Explore Projects Built with Tb6612Fng Doble Puente H
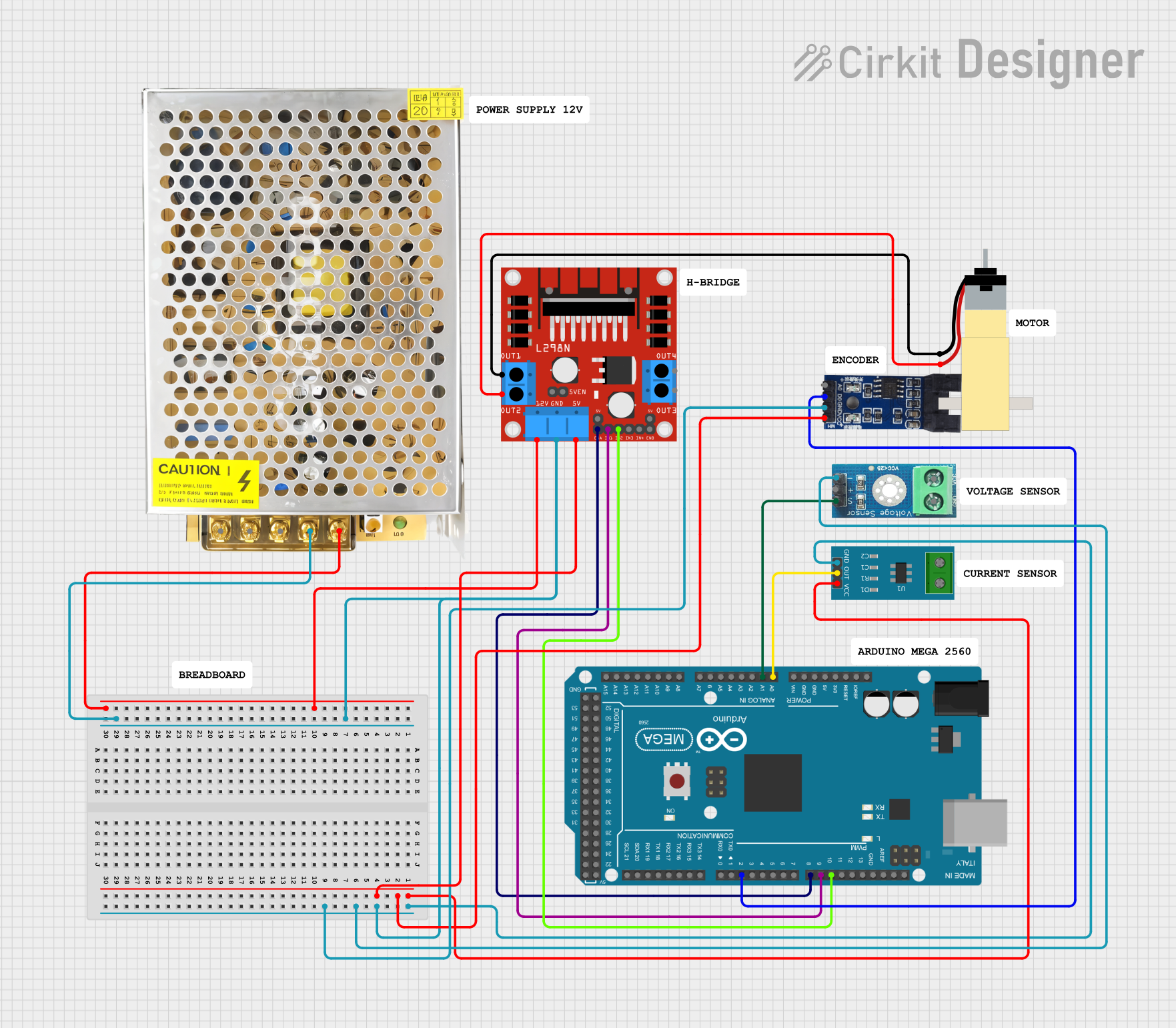
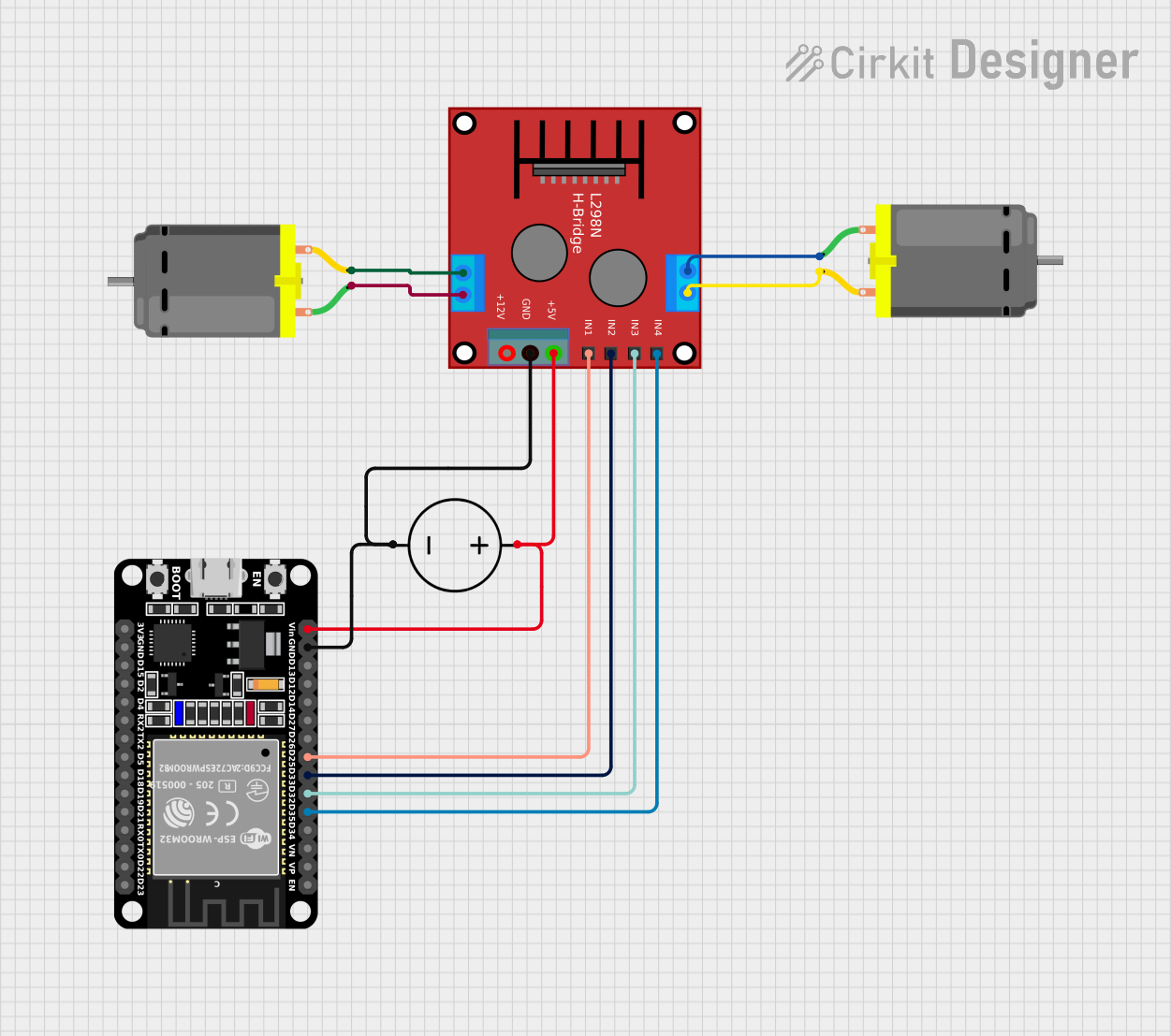
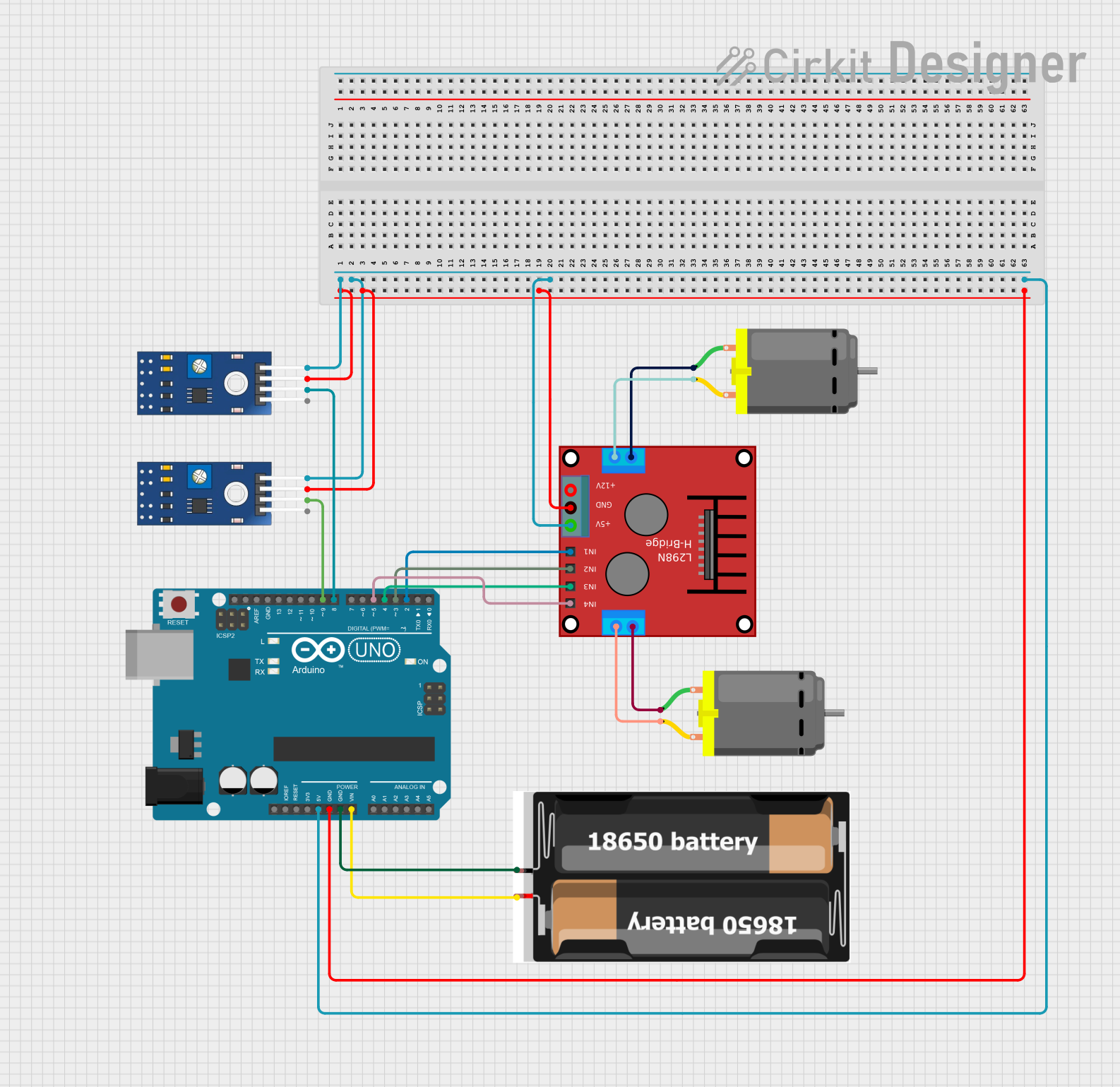
Explore Projects Built with Tb6612Fng Doble Puente H
Common Applications
- Robotics (e.g., controlling wheels or arms)
- Automated conveyor systems
- Remote-controlled vehicles
- Stepper motor control for 3D printers or CNC machines
- DIY electronics projects involving motorized components
Technical Specifications
The TB6612FNG offers the following key technical details:
| Parameter | Value |
|---|---|
| Operating Voltage (Vcc) | 2.7V to 5.5V |
| Motor Voltage (VM) | 2.5V to 13.5V |
| Output Current (per channel) | 1.2A (continuous), 3.2A (peak) |
| Control Interface | PWM (Pulse Width Modulation) |
| Standby Current | 1 µA (typical) |
| Built-in Protections | Thermal shutdown, overcurrent, undervoltage lockout |
| Operating Temperature Range | -20°C to +85°C |
| Package Type | HTSSOP-20 |
Pin Configuration and Descriptions
The TB6612FNG has 20 pins, with the following configuration:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | AIN1 | Input signal for Motor A (H-bridge control) |
| 2 | AIN2 | Input signal for Motor A (H-bridge control) |
| 3 | PWMA | PWM input for Motor A speed control |
| 4 | A01 | Output 1 for Motor A |
| 5 | A02 | Output 2 for Motor A |
| 6 | VM | Motor power supply (2.5V to 13.5V) |
| 7 | VCC | Logic power supply (2.7V to 5.5V) |
| 8 | STBY | Standby control (active HIGH to enable the IC) |
| 9 | BIN1 | Input signal for Motor B (H-bridge control) |
| 10 | BIN2 | Input signal for Motor B (H-bridge control) |
| 11 | PWMB | PWM input for Motor B speed control |
| 12 | B01 | Output 1 for Motor B |
| 13 | B02 | Output 2 for Motor B |
| 14 | GND | Ground |
| 15-20 | NC | No connection (not used) |
Usage Instructions
How to Use the TB6612FNG in a Circuit
Power Connections:
- Connect the
VMpin to the motor power supply (2.5V to 13.5V). - Connect the
VCCpin to the logic power supply (2.7V to 5.5V). - Connect the
GNDpin to the ground of the circuit.
- Connect the
Motor Connections:
- Connect the motor terminals to the
A01andA02pins for Motor A, andB01andB02pins for Motor B.
- Connect the motor terminals to the
Control Signals:
- Use the
AIN1,AIN2, andPWMApins to control Motor A. - Use the
BIN1,BIN2, andPWMBpins to control Motor B. - Apply a PWM signal to the
PWMAandPWMBpins to regulate motor speed. - Set the
STBYpin HIGH to enable the IC.
- Use the
Logic Levels:
- The control pins (
AIN1,AIN2,BIN1,BIN2,PWMA,PWMB, andSTBY) operate at logic levels compatible with theVCCvoltage.
- The control pins (
Example Arduino Code
Below is an example of how to control two DC motors using the TB6612FNG and an Arduino UNO:
// Pin definitions for Motor A
const int AIN1 = 7; // Control pin 1 for Motor A
const int AIN2 = 8; // Control pin 2 for Motor A
const int PWMA = 9; // PWM pin for Motor A
// Pin definitions for Motor B
const int BIN1 = 10; // Control pin 1 for Motor B
const int BIN2 = 11; // Control pin 2 for Motor B
const int PWMB = 6; // PWM pin for Motor B
// Standby pin
const int STBY = 12; // Standby control pin
void setup() {
// Set control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(STBY, OUTPUT);
// Enable the motor driver by setting STBY HIGH
digitalWrite(STBY, HIGH);
}
void loop() {
// Example: Drive Motor A forward at 50% speed
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 128); // 50% duty cycle (128 out of 255)
// Example: Drive Motor B backward at 75% speed
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
analogWrite(PWMB, 192); // 75% duty cycle (192 out of 255)
delay(2000); // Run motors for 2 seconds
// Stop both motors
analogWrite(PWMA, 0);
analogWrite(PWMB, 0);
delay(2000); // Wait for 2 seconds before repeating
}
Important Considerations
- Ensure that the motor power supply (
VM) matches the voltage requirements of your motors. - Use appropriate decoupling capacitors near the
VMandVCCpins to reduce noise. - Avoid exceeding the maximum current ratings to prevent damage to the IC.
- Always set the
STBYpin HIGH to enable the motor driver.
Troubleshooting and FAQs
Common Issues
Motors Not Running:
- Ensure the
STBYpin is set HIGH. - Verify that the control signals (
AIN1,AIN2,BIN1,BIN2) are correctly configured. - Check the power supply connections for
VMandVCC.
- Ensure the
Motor Speed Not Changing:
- Confirm that a valid PWM signal is being applied to the
PWMAandPWMBpins. - Check the duty cycle of the PWM signal to ensure it is within the expected range.
- Confirm that a valid PWM signal is being applied to the
Overheating:
- Ensure the current drawn by the motors does not exceed the IC's maximum ratings.
- Add a heatsink or improve ventilation if necessary.
No Output Voltage:
- Verify that the input logic levels match the
VCCvoltage. - Check for any short circuits or incorrect wiring.
- Verify that the input logic levels match the
FAQs
Q: Can the TB6612FNG drive stepper motors?
A: Yes, the TB6612FNG can drive a bipolar stepper motor by controlling the two H-bridges with appropriate step sequences.
Q: What happens if the IC overheats?
A: The TB6612FNG has a built-in thermal shutdown feature that disables the outputs to protect the IC from damage.
Q: Can I use the TB6612FNG with a 3.3V microcontroller?
A: Yes, the TB6612FNG is compatible with 3.3V logic levels as long as the VCC pin is powered within the 2.7V to 5.5V range.