How to Use 4in1 ESC AM32 60A : Examples, Pinouts, and Specs
Introduction
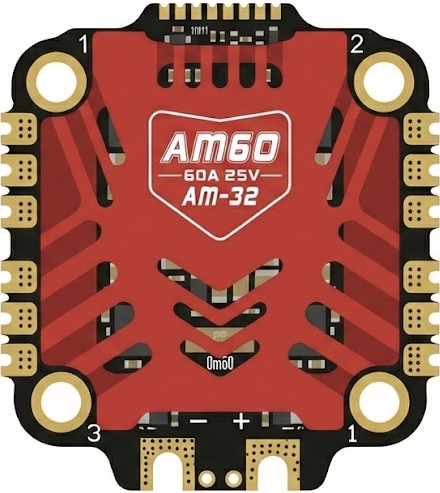
The Skystars 4in1 ESC AM32 60A (Part ID: AM60) is a high-performance electronic speed controller (ESC) designed specifically for multi-rotor drones. This 4-in-1 ESC integrates four individual ESCs into a single compact unit, simplifying wiring, reducing weight, and improving overall efficiency. It is capable of handling up to 60A of continuous current per channel, making it suitable for high-power brushless motors used in racing drones, freestyle drones, and other UAV applications.
Explore Projects Built with 4in1 ESC AM32 60A

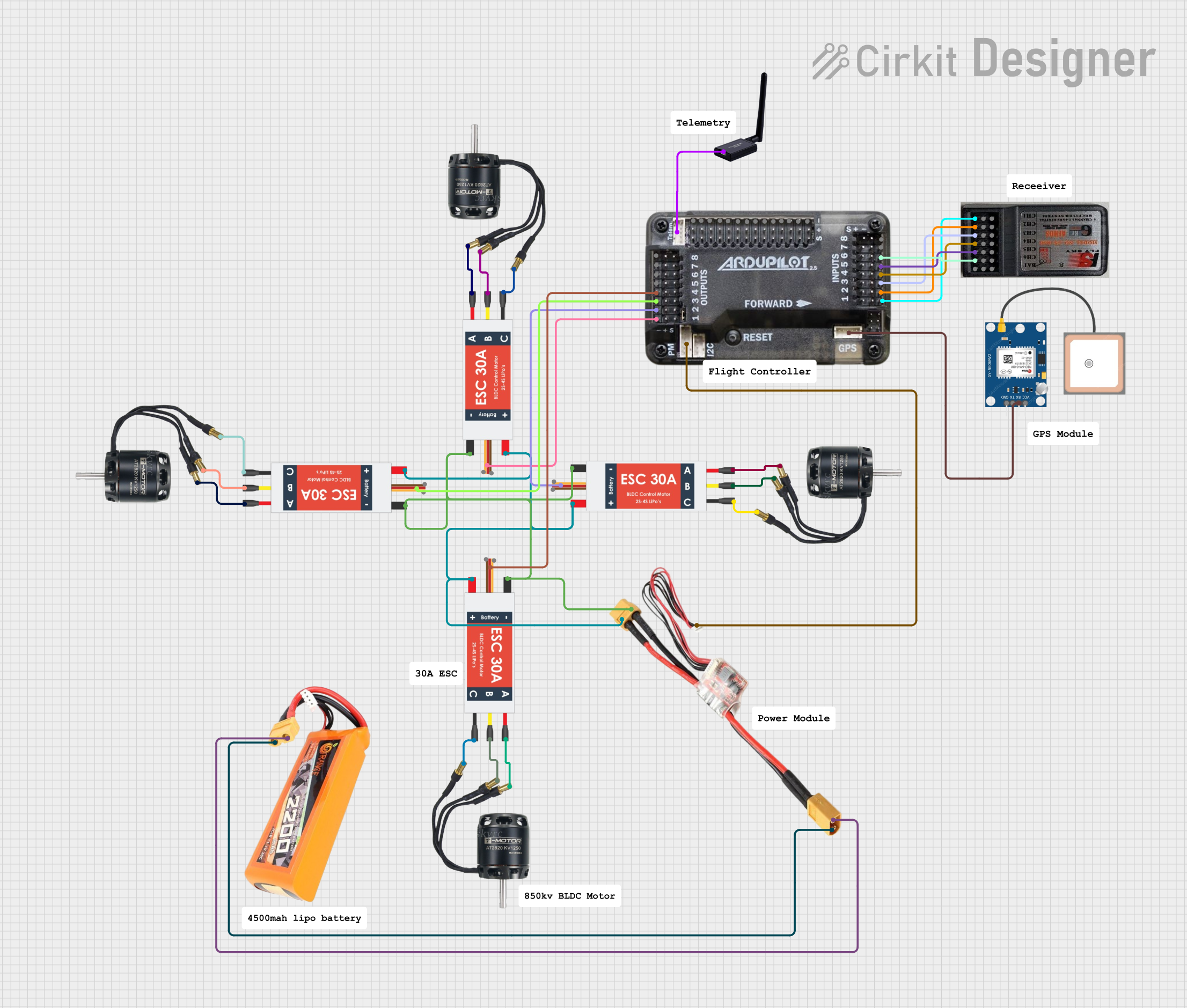


Explore Projects Built with 4in1 ESC AM32 60A
Common Applications and Use Cases
- Racing drones requiring high-speed motor control
- Freestyle drones for aerial acrobatics
- Professional UAVs for photography and videography
- Lightweight and compact drone builds where space and weight are critical
Technical Specifications
The following table outlines the key technical details of the Skystars 4in1 ESC AM32 60A:
| Parameter | Value |
|---|---|
| Input Voltage | 3S–6S LiPo (11.1V–25.2V) |
| Continuous Current | 60A per channel |
| Burst Current | 70A per channel (10 seconds max) |
| Firmware | AM32 (open-source) |
| Motor Protocols Supported | DShot150, DShot300, DShot600, |
| DShot1200, PWM, OneShot125, | |
| OneShot42, MultiShot | |
| Dimensions | 45mm x 37mm x 6mm |
| Weight | 15g (excluding wiring) |
| Mounting Hole Spacing | 30.5mm x 30.5mm (M3 screws) |
| Operating Temperature | -20°C to 85°C |
Pin Configuration and Descriptions
The Skystars 4in1 ESC AM32 60A features a connector for signal input and power distribution. Below is the pinout description:
Signal Input Connector
| Pin | Label | Description |
|---|---|---|
| 1 | GND | Ground connection for signal input |
| 2 | M1 | Signal input for Motor 1 |
| 3 | M2 | Signal input for Motor 2 |
| 4 | M3 | Signal input for Motor 3 |
| 5 | M4 | Signal input for Motor 4 |
| 6 | CUR | Current sensor output |
| 7 | VBAT | Battery voltage monitoring output |
Power Input and Motor Output
| Connection | Label | Description |
|---|---|---|
| Power Input | + | Positive terminal for battery input |
| - | Negative terminal for battery input | |
| Motor Outputs | M1+/- | Positive and negative terminals for |
| Motor 1 | ||
| M2+/- | Positive and negative terminals for | |
| Motor 2 | ||
| M3+/- | Positive and negative terminals for | |
| Motor 3 | ||
| M4+/- | Positive and negative terminals for | |
| Motor 4 |
Usage Instructions
How to Use the Component in a Circuit
- Power Connection: Connect the battery's positive and negative terminals to the ESC's power input pads (+ and -). Ensure the battery voltage is within the supported range (3S–6S LiPo).
- Motor Connection: Solder the three wires of each brushless motor to the corresponding motor output pads (M1, M2, M3, M4). The order of the wires determines the motor's rotation direction, which can be adjusted later in software.
- Signal Connection: Use the provided signal input connector to connect the ESC to the flight controller. Match the signal pins (M1, M2, M3, M4) to the corresponding motor outputs on the flight controller.
- Telemetry and Monitoring: If supported by your flight controller, connect the CUR (current sensor) and VBAT (voltage monitoring) pins for real-time telemetry data.
Important Considerations and Best Practices
- Cooling: Ensure adequate airflow over the ESC to prevent overheating during operation.
- Firmware Updates: The AM32 firmware is open-source and can be updated for improved performance or additional features. Use a compatible tool to flash the firmware.
- Motor Calibration: Calibrate the ESCs through your flight controller software to ensure proper throttle response.
- Signal Protocol: Configure the ESC to use the same motor protocol as your flight controller (e.g., DShot600 or DShot1200) for optimal performance.
Example Code for Arduino UNO
While the Skystars 4in1 ESC AM32 60A is typically used with flight controllers, it can also be controlled using an Arduino UNO for testing purposes. Below is an example code snippet to control a single motor using a PWM signal:
#include <Servo.h> // Include the Servo library for PWM control
Servo motor1; // Create a Servo object for Motor 1
void setup() {
motor1.attach(9); // Attach Motor 1 to pin 9 on the Arduino
motor1.writeMicroseconds(1000); // Set initial throttle to 0 (1000us)
delay(2000); // Wait for 2 seconds to initialize the ESC
}
void loop() {
motor1.writeMicroseconds(1500); // Set throttle to 50% (1500us)
delay(5000); // Run the motor at 50% throttle for 5 seconds
motor1.writeMicroseconds(1000); // Set throttle to 0 (1000us)
delay(5000); // Stop the motor for 5 seconds
}
Note: Ensure the ESC is powered by a suitable battery and connected to the Arduino's ground for proper operation.
Troubleshooting and FAQs
Common Issues and Solutions
Motors Not Spinning:
- Cause: Incorrect signal connection or protocol mismatch.
- Solution: Verify the signal wires are connected to the correct pins on the flight controller. Ensure the ESC and flight controller are configured to use the same motor protocol (e.g., DShot600).
Overheating:
- Cause: Insufficient cooling or excessive current draw.
- Solution: Improve airflow over the ESC or reduce the motor load. Check for proper soldering and wire gauge.
No Telemetry Data:
- Cause: CUR or VBAT pins not connected or configured.
- Solution: Ensure the telemetry pins are connected to the flight controller and properly configured in the software.
Motor Spinning in the Wrong Direction:
- Cause: Incorrect motor wiring.
- Solution: Swap any two of the three motor wires to reverse the motor's direction.
FAQs
Can I use this ESC with a 2S LiPo battery? No, the minimum supported input voltage is 3S (11.1V).
What is the maximum supported motor KV? The maximum motor KV depends on the input voltage and propeller size. Consult the motor's datasheet for compatibility.
Is the AM32 firmware customizable? Yes, the AM32 firmware is open-source and can be customized to suit specific requirements.
Can I use this ESC for fixed-wing aircraft? While designed for multi-rotor drones, it can be used for fixed-wing aircraft with appropriate configuration.