How to Use L298P: Examples, Pinouts, and Specs
Introduction
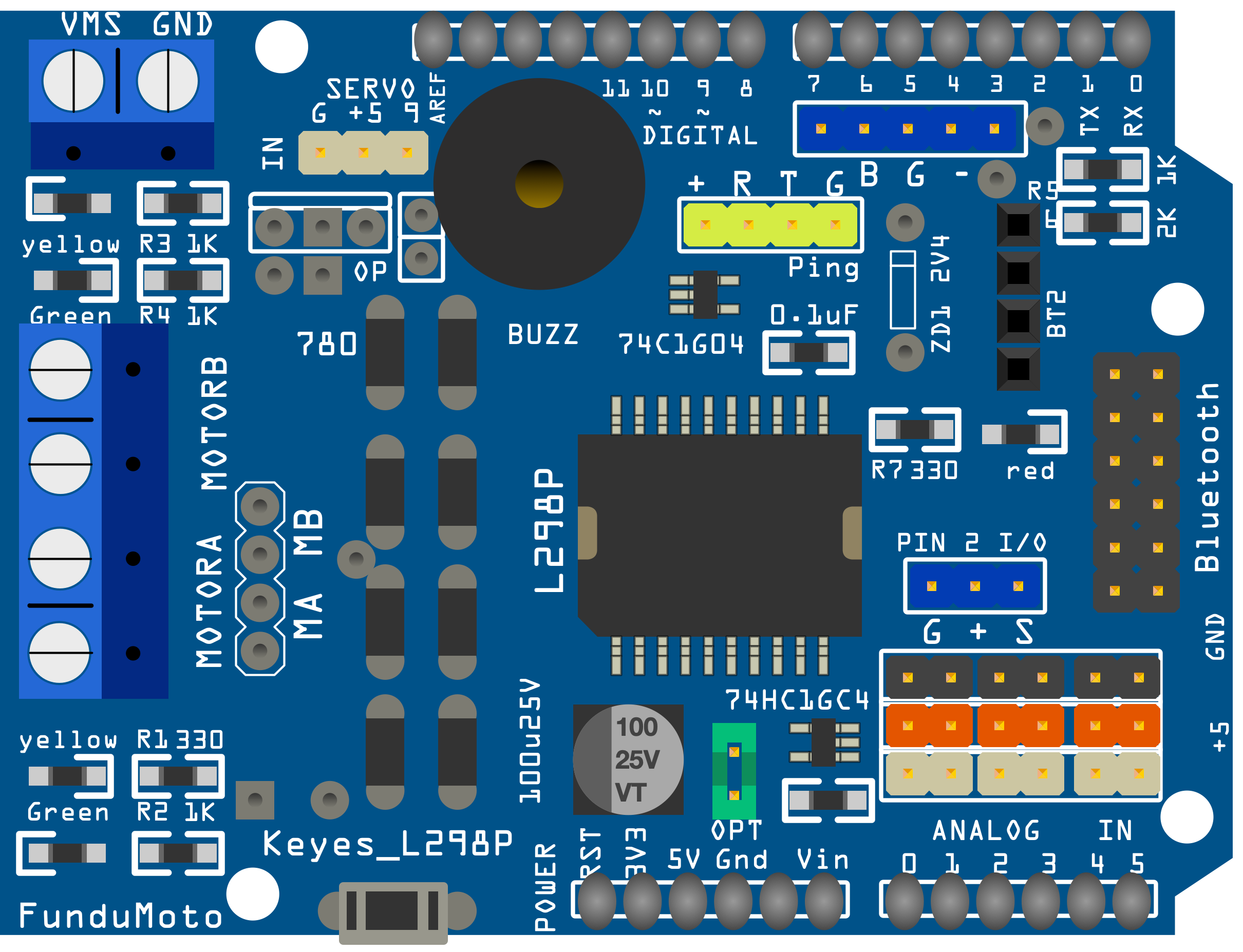
The L298P is a dual H-bridge motor driver IC manufactured by Arduino, designed to control the direction and speed of DC motors and stepper motors. It is capable of driving two motors simultaneously, making it an essential component for robotics, automation, and motor control applications. The L298P can handle high current loads and is widely used in projects requiring precise motor control.
Explore Projects Built with L298P
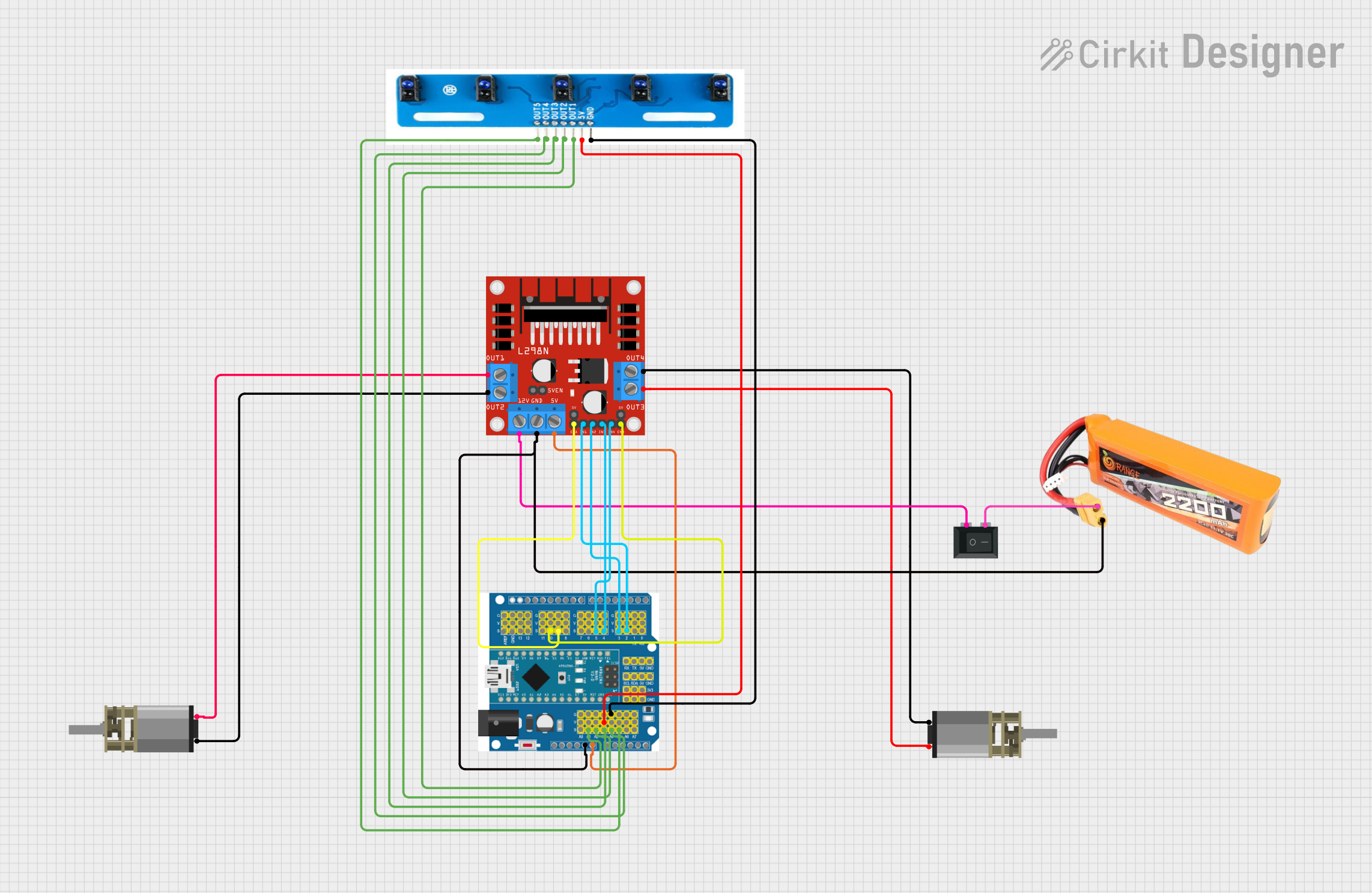

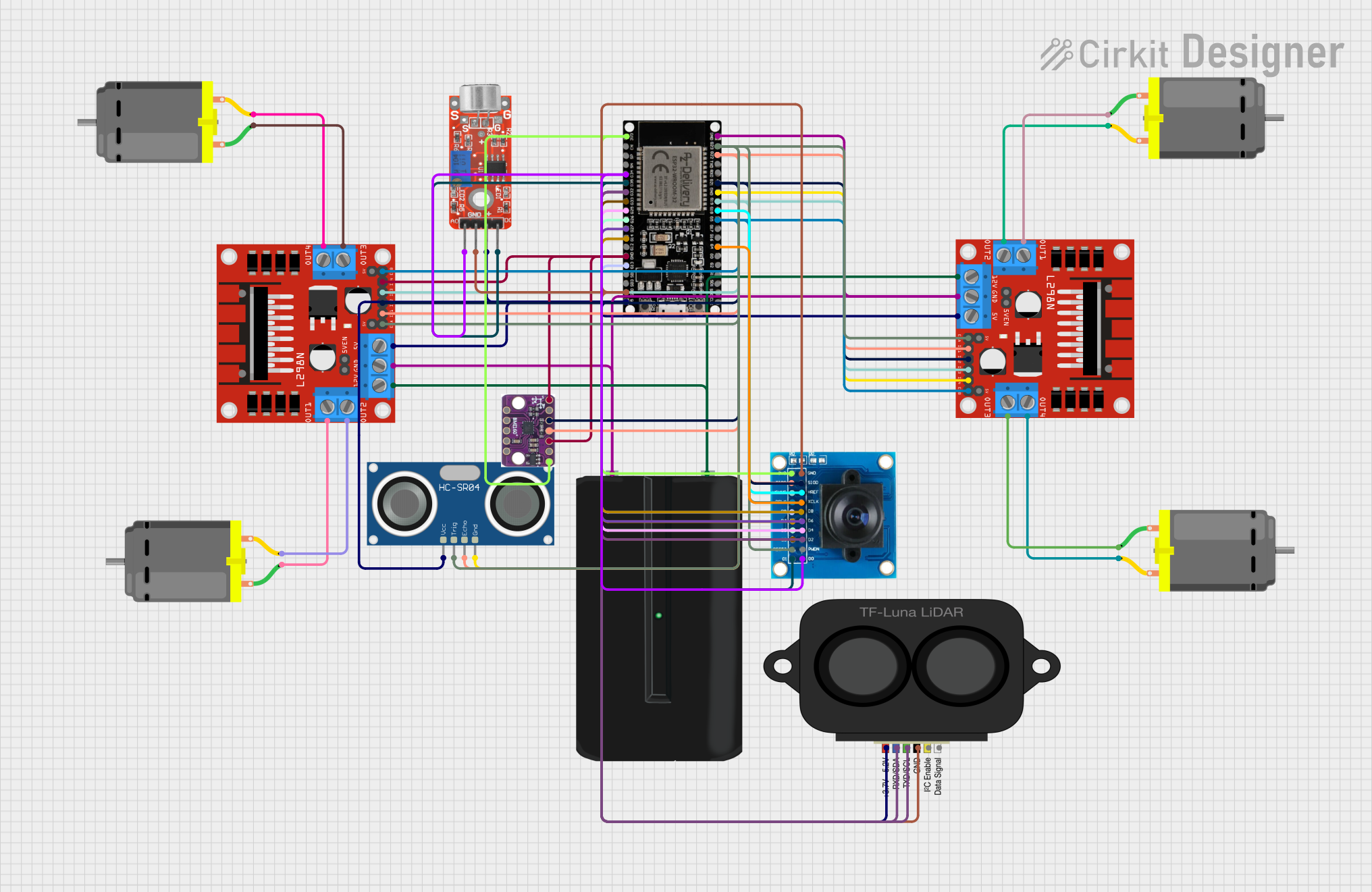
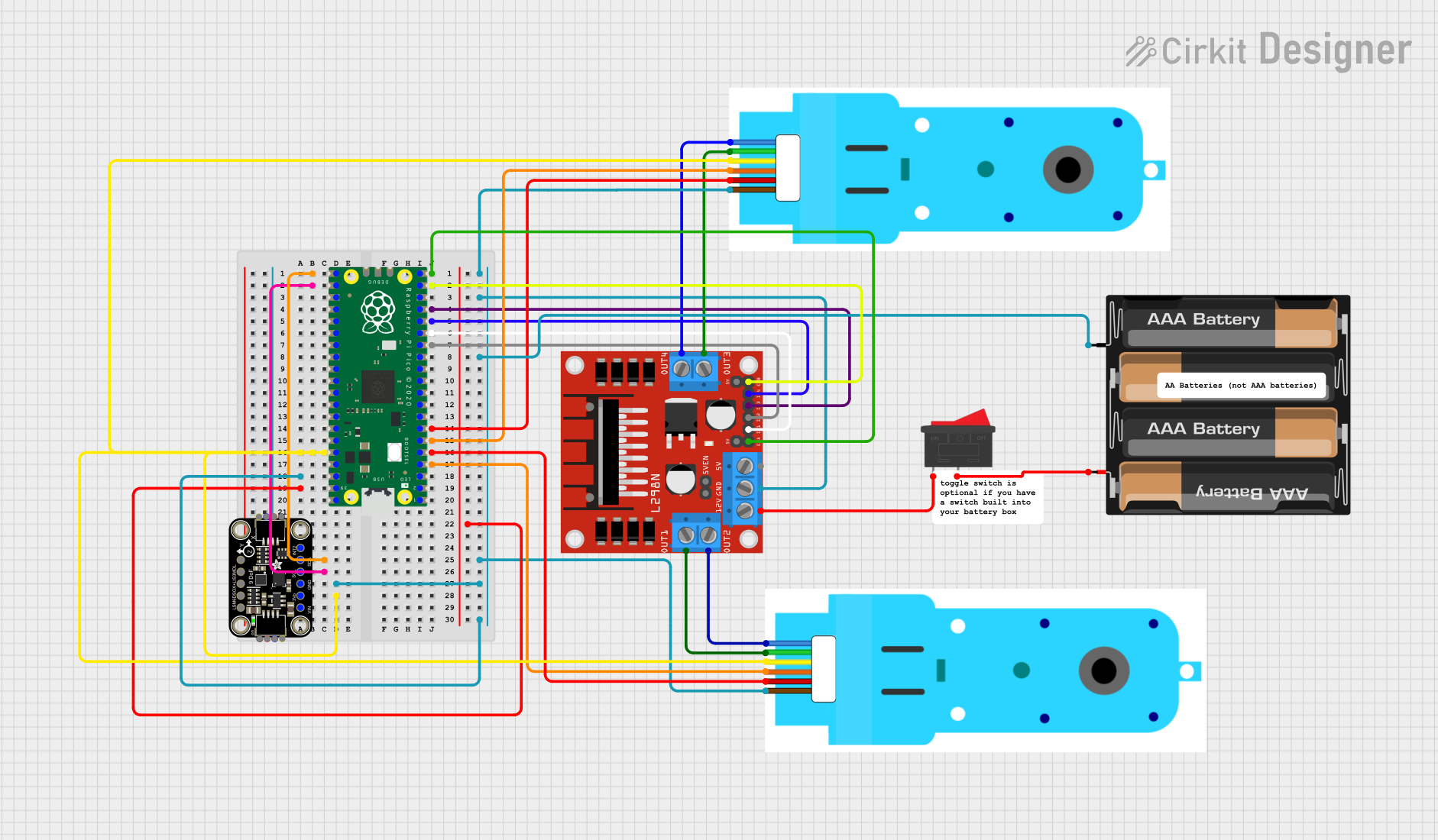
Explore Projects Built with L298P
Common Applications and Use Cases
- Robotics and automation systems
- Controlling DC motors in remote-controlled vehicles
- Driving stepper motors in CNC machines and 3D printers
- Motorized conveyor belts and industrial machinery
- Educational projects involving motor control
Technical Specifications
The L298P is a robust and versatile motor driver IC with the following key specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 5V to 46V |
| Maximum Output Current | 2A per channel (continuous) |
| Peak Output Current | 3A per channel (non-repetitive, short time) |
| Logic Voltage | 5V |
| Power Dissipation | 25W (at 75°C with proper heat sinking) |
| Control Logic Levels | High: 2.3V to 5V, Low: 0V to 1.5V |
| Operating Temperature Range | -25°C to +130°C |
| Motor Types Supported | DC motors, stepper motors |
Pin Configuration and Descriptions
The L298P IC has 15 pins, each serving a specific function. Below is the pin configuration:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | Enable A | Enables or disables the output for Motor A. High = Enabled, Low = Disabled. |
| 2 | Input 1 | Logic input to control Motor A direction. |
| 3 | Input 2 | Logic input to control Motor A direction. |
| 4 | Output 1 | Output terminal for Motor A. |
| 5 | Output 2 | Output terminal for Motor A. |
| 6 | Ground | Ground connection. |
| 7 | Ground | Ground connection. |
| 8 | VSS | Supply voltage for the motor (5V to 46V). |
| 9 | VS | Logic voltage supply (typically 5V). |
| 10 | Ground | Ground connection. |
| 11 | Output 3 | Output terminal for Motor B. |
| 12 | Output 4 | Output terminal for Motor B. |
| 13 | Input 3 | Logic input to control Motor B direction. |
| 14 | Input 4 | Logic input to control Motor B direction. |
| 15 | Enable B | Enables or disables the output for Motor B. High = Enabled, Low = Disabled. |
Usage Instructions
How to Use the L298P in a Circuit
- Power Supply: Connect the motor power supply (5V to 46V) to the
VSSpin and the logic power supply (5V) to theVSpin. Ensure the ground pins are connected to the common ground of the circuit. - Motor Connections: Connect the motor terminals to the
Outputpins (e.g.,Output 1andOutput 2for Motor A). - Control Logic: Use the
Inputpins to control the direction of the motors:- For Motor A:
Input 1andInput 2 - For Motor B:
Input 3andInput 4
- For Motor A:
- Enable Pins: Set the
Enablepins (Enable AandEnable B) to HIGH to activate the corresponding motor outputs. - Heat Dissipation: Use a heat sink if the IC is expected to handle high currents for extended periods.
Important Considerations and Best Practices
- Always ensure the motor voltage and current ratings are within the L298P's specifications.
- Use external diodes for flyback protection if the motors generate significant back EMF.
- Avoid shorting the output pins, as this can damage the IC.
- Use proper decoupling capacitors near the power supply pins to reduce noise.
Example: Using L298P with Arduino UNO
Below is an example of controlling a DC motor using the L298P and Arduino UNO:
// Define motor control pins
const int enableA = 9; // Enable pin for Motor A
const int input1 = 8; // Input 1 for Motor A
const int input2 = 7; // Input 2 for Motor A
void setup() {
// Set motor control pins as outputs
pinMode(enableA, OUTPUT);
pinMode(input1, OUTPUT);
pinMode(input2, OUTPUT);
// Initialize motor in stopped state
digitalWrite(enableA, LOW);
digitalWrite(input1, LOW);
digitalWrite(input2, LOW);
}
void loop() {
// Rotate motor forward
digitalWrite(enableA, HIGH); // Enable Motor A
digitalWrite(input1, HIGH); // Set Input 1 HIGH
digitalWrite(input2, LOW); // Set Input 2 LOW
delay(2000); // Run motor for 2 seconds
// Rotate motor backward
digitalWrite(input1, LOW); // Set Input 1 LOW
digitalWrite(input2, HIGH); // Set Input 2 HIGH
delay(2000); // Run motor for 2 seconds
// Stop motor
digitalWrite(enableA, LOW); // Disable Motor A
delay(2000); // Wait for 2 seconds
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Running
- Cause: Enable pin is not set to HIGH.
- Solution: Ensure the
Enablepin for the motor is set to HIGH.
Motor Running in the Wrong Direction
- Cause: Incorrect logic levels on the
Inputpins. - Solution: Swap the logic levels of the
Inputpins to reverse the motor direction.
- Cause: Incorrect logic levels on the
Overheating
- Cause: High current draw or insufficient heat dissipation.
- Solution: Use a heat sink or reduce the motor load.
No Output Voltage
- Cause: Incorrect power supply connections.
- Solution: Verify the connections to the
VSSandVSpins.
FAQs
Can the L298P drive stepper motors? Yes, the L298P can drive stepper motors by controlling the sequence of the
Inputpins.What is the maximum motor voltage supported? The L298P supports motor voltages up to 46V.
Do I need external diodes for protection? While the L298P has internal diodes, external diodes are recommended for motors with high back EMF.
Can I control the motor speed with the L298P? Yes, you can control the motor speed by applying a PWM signal to the
Enablepins.