How to Use RC-Car bluetooth driver: Examples, Pinouts, and Specs
Introduction
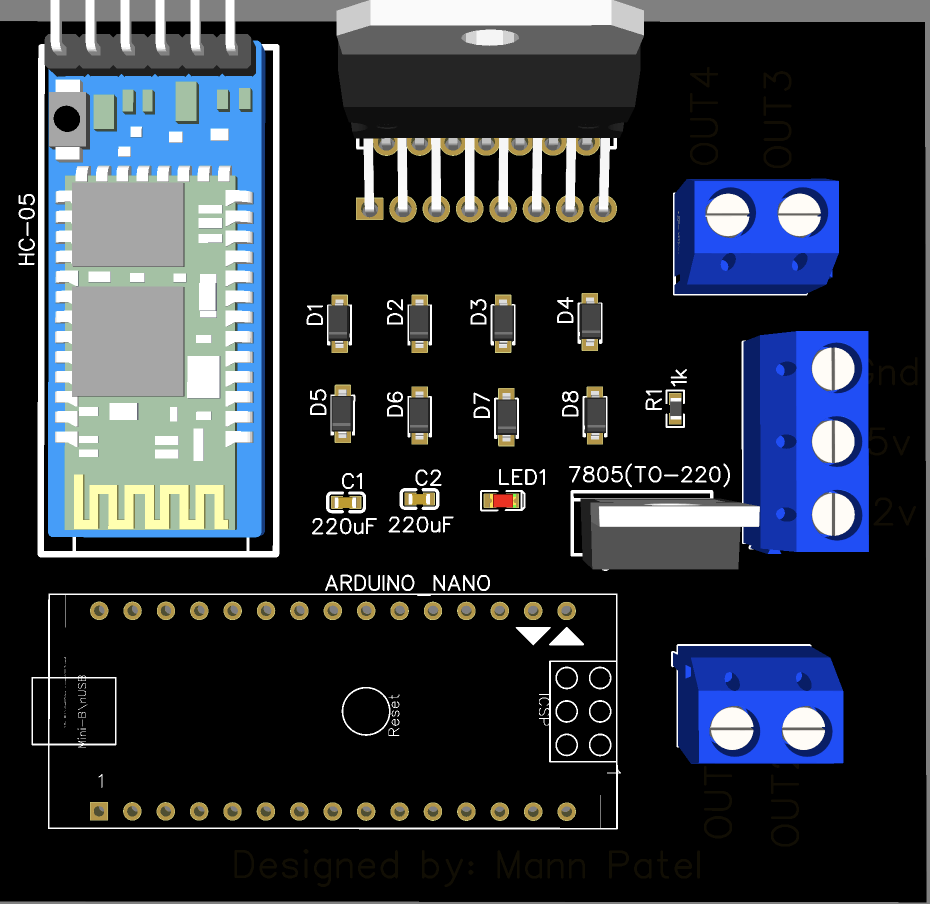
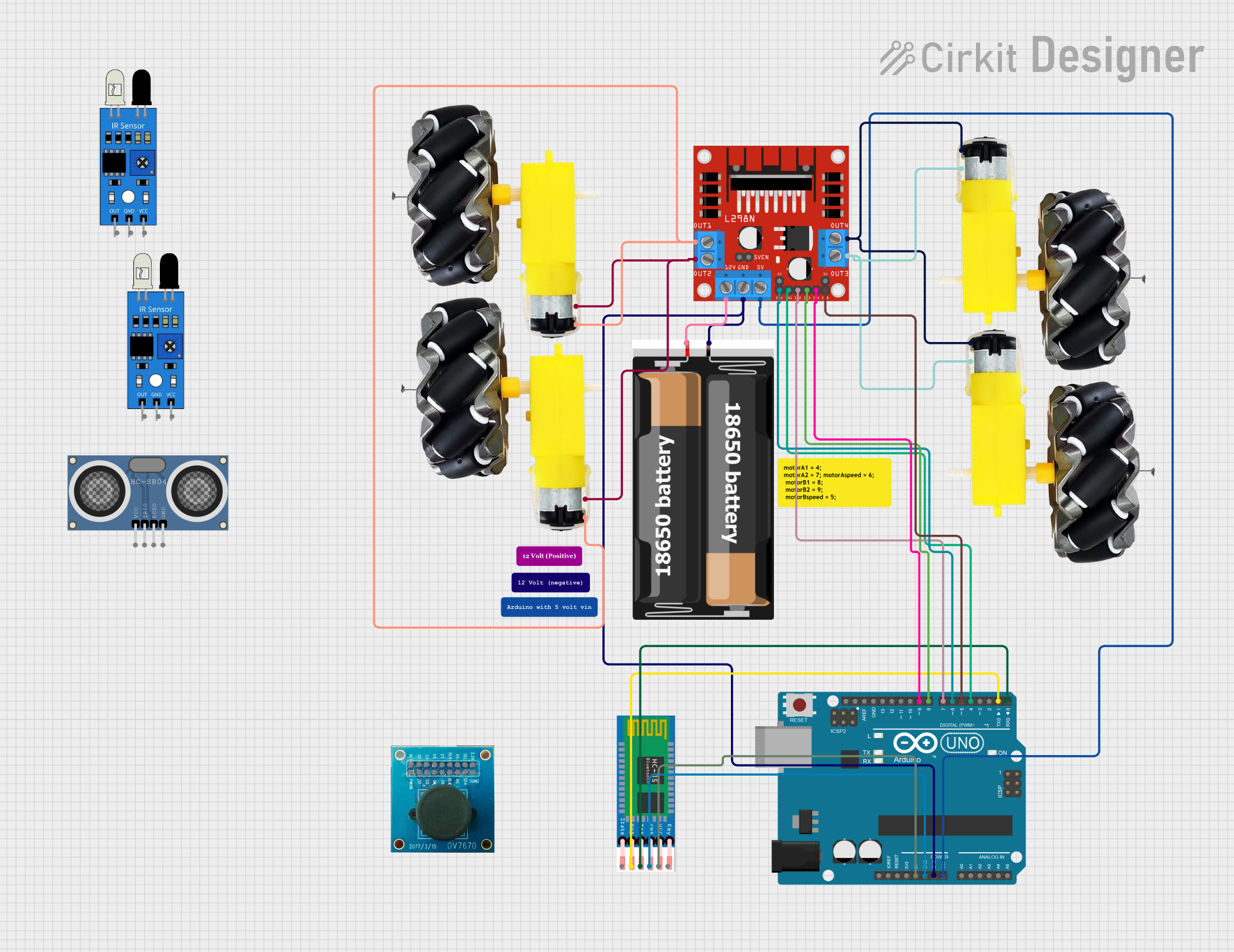
The RC-Car Bluetooth Driver is an electronic module designed to provide wireless control capabilities to radio-controlled (RC) cars. By interfacing with a Bluetooth-enabled mobile device or computer, users can remotely control the speed, direction, and various other functions of their RC car. This component is ideal for hobbyists and enthusiasts looking to upgrade their RC car with modern control options.
Explore Projects Built with RC-Car bluetooth driver
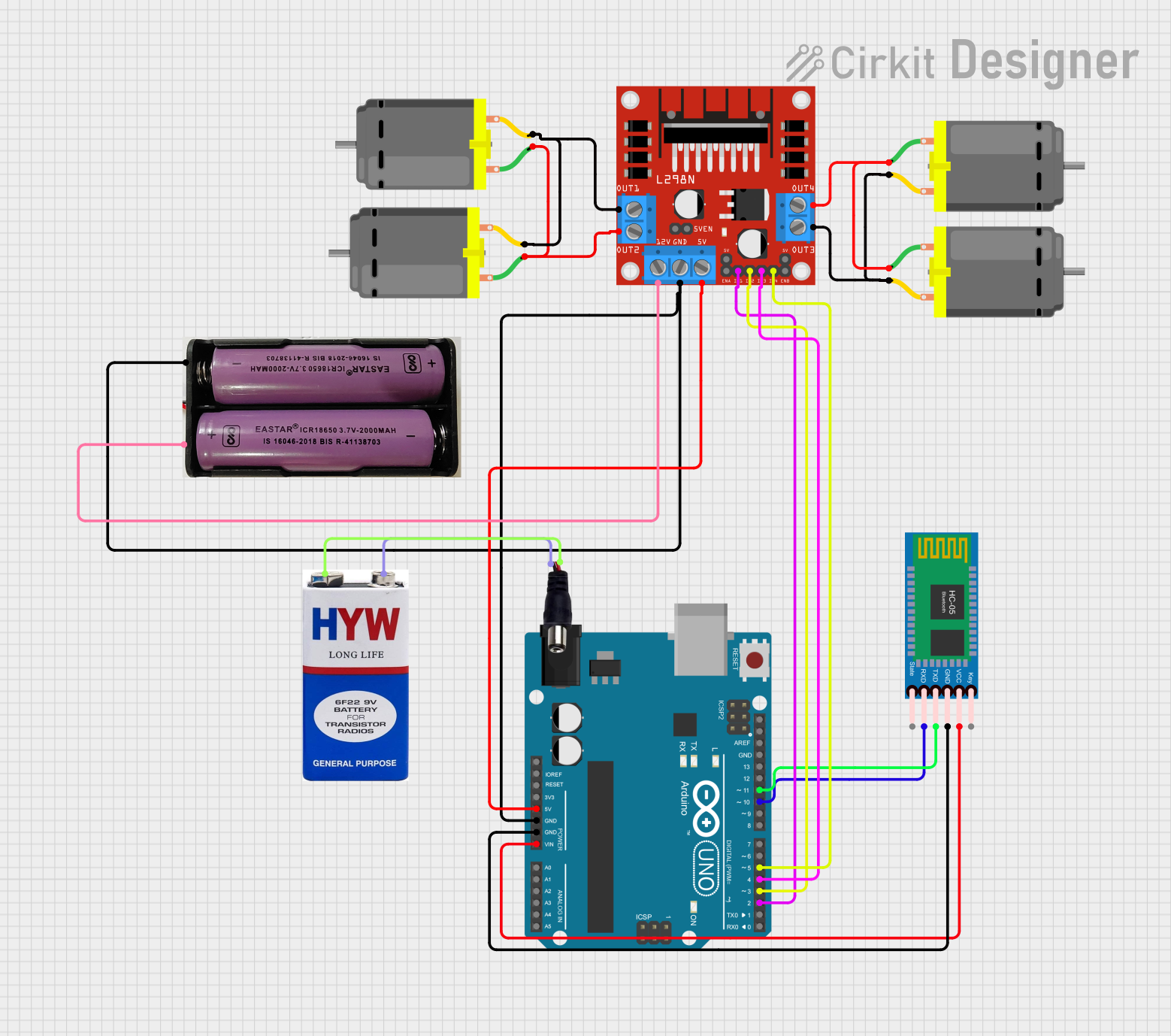
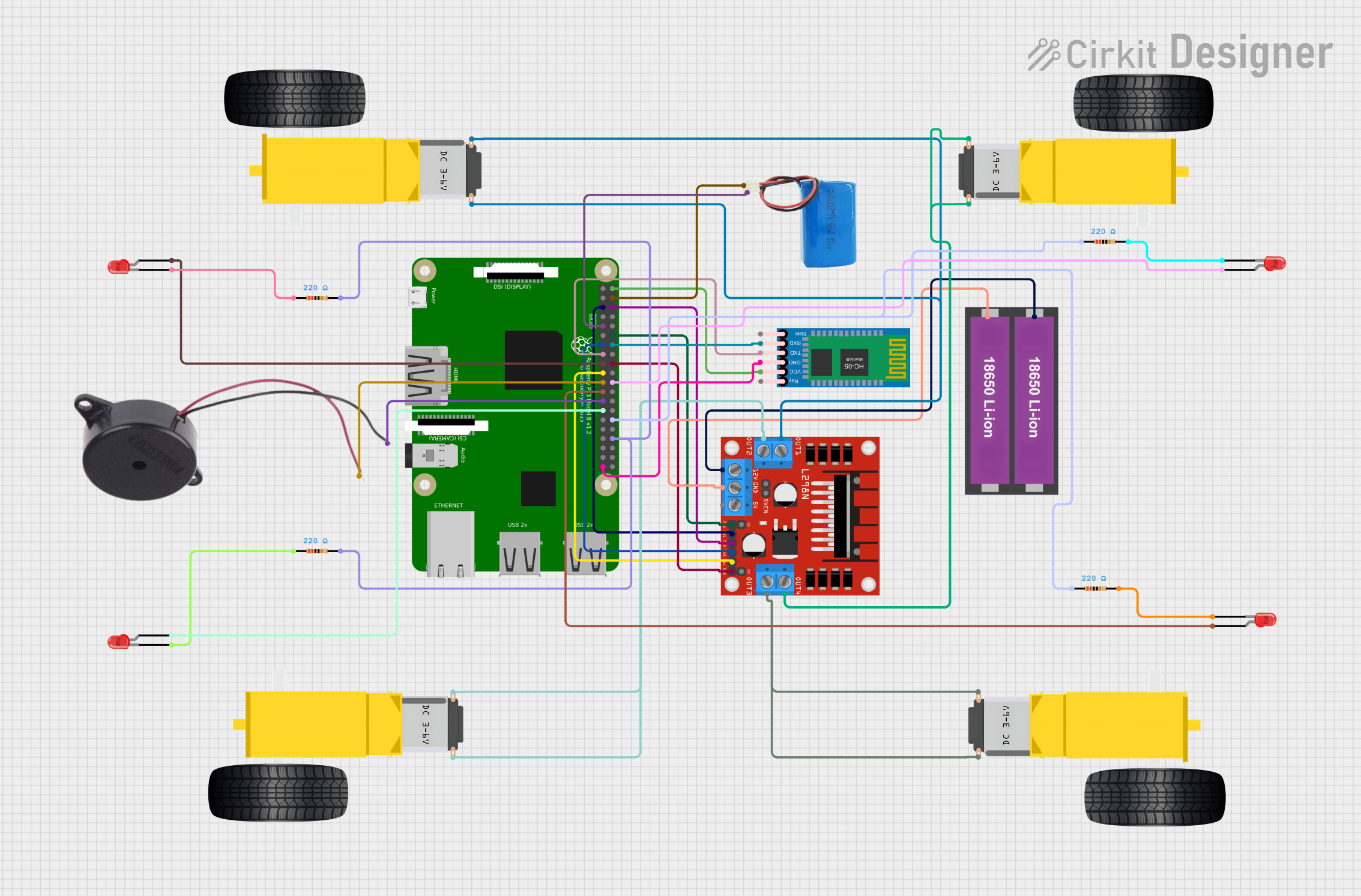
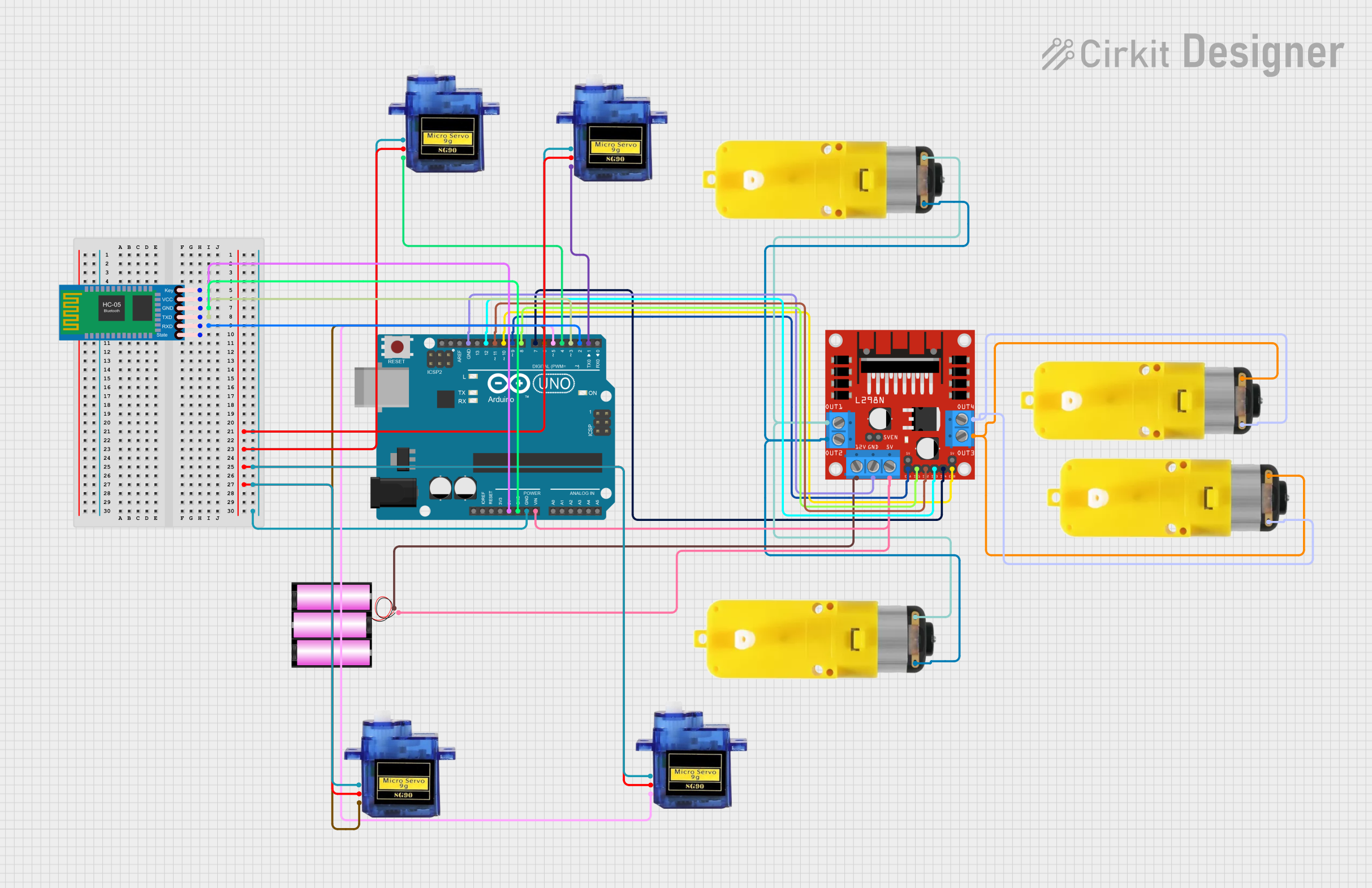
Explore Projects Built with RC-Car bluetooth driver
Common Applications and Use Cases
- Hobbyist RC car modifications
- Educational projects involving wireless control
- DIY remote control vehicles
- Robotics and automation projects
Technical Specifications
Key Technical Details
- Operating Voltage: 3.3V to 6V
- Continuous Current Rating: 2A
- Peak Current: 3A (for short durations)
- Bluetooth Version: 4.0 (compatible with BLE)
- Communication Range: Up to 10 meters (without obstacles)
- Control Channels: 2 (typically used for speed and steering)
- Input Interface: UART (TTL logic levels)
- Operating Temperature: -10°C to +55°C
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (3.3V to 6V) |
| 2 | GND | Ground |
| 3 | TX | UART Transmit; connects to RX of MCU |
| 4 | RX | UART Receive; connects to TX of MCU |
| 5 | CH1 | Channel 1 output (e.g., speed control) |
| 6 | CH2 | Channel 2 output (e.g., steering control) |
Usage Instructions
Integrating with a Circuit
- Power Supply: Connect the VCC pin to a suitable power source within the 3.3V to 6V range. Ensure that the power supply can handle the current requirements of the module.
- Ground Connection: Connect the GND pin to the common ground of your circuit.
- UART Communication: Interface the TX and RX pins with the corresponding RX and TX pins of your microcontroller unit (MCU), such as an Arduino UNO.
- Output Channels: Connect CH1 and CH2 to the respective control inputs of your RC car's motor driver or servos.
Important Considerations and Best Practices
- Ensure that the power supply is stable and within the specified voltage range to prevent damage to the Bluetooth driver.
- Pair the Bluetooth module with your control device before attempting to send commands.
- Use shielded cables for UART communication if there is a lot of electrical noise in the environment.
- Always disconnect the power before making or altering connections to prevent shorts and damage.
Example Code for Arduino UNO
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(10, 11); // RX | TX
void setup() {
pinMode(9, OUTPUT); // CH1
pinMode(8, OUTPUT); // CH2
BTSerial.begin(9600); // Start Bluetooth communication at 9600 baud rate
Serial.begin(9600); // Start serial communication for debugging
}
void loop() {
if (BTSerial.available()) { // Check if there are incoming bytes via Bluetooth
char command = BTSerial.read(); // Read the incoming byte
switch (command) {
case 'F': // Forward command
digitalWrite(9, HIGH);
digitalWrite(8, LOW);
break;
case 'B': // Backward command
digitalWrite(9, LOW);
digitalWrite(8, HIGH);
break;
case 'S': // Stop command
digitalWrite(9, LOW);
digitalWrite(8, LOW);
break;
// Add more cases as needed for additional commands
}
}
}
Troubleshooting and FAQs
Common Issues
- Bluetooth Pairing Issues: Ensure the Bluetooth module is in pairing mode and that your device is compatible with Bluetooth 4.0 or BLE.
- No Response to Commands: Verify that all connections are secure and that the correct power supply is used. Check that the UART pins are correctly connected to the MCU.
- Intermittent Control: This could be due to power supply issues or environmental interference. Ensure a stable power source and consider using shielded cables.
Solutions and Tips
- Reset the Module: If the module is unresponsive, try disconnecting the power for a few seconds and then reconnecting it.
- Check LED Indicators: Most Bluetooth modules have LED indicators that can help diagnose connection and activity status.
- Update Firmware: Ensure that the module's firmware is up to date for optimal performance and compatibility.
FAQs
Q: Can I use this module with any RC car? A: The module can be used with any RC car that has provisions for electronic speed and steering control, provided you can interface the module with the car's electronics.
Q: What is the maximum range of the Bluetooth connection? A: The typical range is up to 10 meters, but this can be affected by obstacles and interference.
Q: How do I change the Bluetooth name and password of the module? A: This process varies by module manufacturer. Refer to the specific module's datasheet or user manual for instructions on configuring Bluetooth settings.
Q: Can I control multiple RC cars with one Bluetooth driver? A: No, each Bluetooth driver is designed to control one RC car at a time. However, you can pair multiple drivers with separate control devices to manage multiple cars independently.
This documentation provides a comprehensive guide to using the RC-Car Bluetooth Driver. For further assistance or technical support, please contact the manufacturer or visit their support forums.