How to Use DFRobot dust sensor adapter Gravity: Examples, Pinouts, and Specs
Introduction
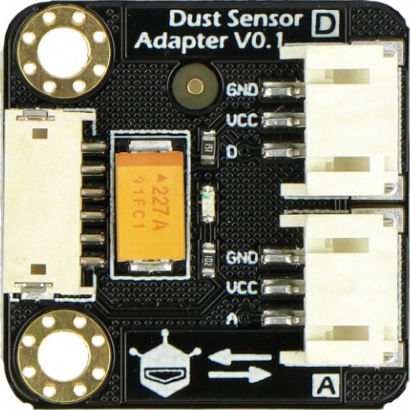
The DFRobot Dust Sensor Adapter Gravity is a specialized adapter designed to simplify the connection of DFRobot's dust sensors to microcontrollers, such as Arduino boards. This adapter provides a convenient interface for integrating dust sensors into air quality monitoring projects, enabling accurate and reliable data collection. Its Gravity interface ensures compatibility with DFRobot's ecosystem of sensors and modules, making it an excellent choice for prototyping and development.
Explore Projects Built with DFRobot dust sensor adapter Gravity
Explore Projects Built with DFRobot dust sensor adapter Gravity
Common Applications and Use Cases
- Air quality monitoring systems
- Environmental data logging
- Smart home automation for air purification
- Educational projects on pollution and air quality
- Industrial air quality control systems
Technical Specifications
The DFRobot Dust Sensor Adapter Gravity is designed to work seamlessly with dust sensors and microcontrollers. Below are its key technical details:
Key Technical Details
- Input Voltage: 5V DC
- Output Signal: Analog voltage (0-5V)
- Interface: Gravity 3-pin interface (Signal, VCC, GND)
- Dimensions: 30mm x 22mm
- Weight: 5g
- Operating Temperature: -10°C to 50°C
- Compatibility: Compatible with DFRobot dust sensors (e.g., GP2Y1010AU0F, DSM501A)
Pin Configuration and Descriptions
The adapter features a 3-pin Gravity interface for easy connection to microcontrollers. Below is the pin configuration:
| Pin Name | Description |
|---|---|
| Signal | Outputs the analog voltage signal from the dust sensor |
| VCC | Power supply input (5V DC) |
| GND | Ground connection |
Usage Instructions
How to Use the Component in a Circuit
- Connect the Dust Sensor: Attach the dust sensor to the adapter using the provided connector. Ensure the pins are aligned correctly.
- Connect to Microcontroller: Use a 3-pin Gravity cable to connect the adapter to your microcontroller. Match the Signal, VCC, and GND pins on the adapter to the corresponding pins on the microcontroller.
- Power the System: Supply 5V DC to the microcontroller, which will power the adapter and the dust sensor.
- Read the Signal: The adapter outputs an analog voltage signal proportional to the dust concentration. Use the microcontroller's ADC (Analog-to-Digital Converter) to read and process this signal.
Important Considerations and Best Practices
- Calibration: For accurate measurements, calibrate the dust sensor in a controlled environment.
- Placement: Place the dust sensor in an area with good airflow but away from direct wind or obstructions.
- Power Supply: Ensure a stable 5V power supply to avoid signal fluctuations.
- Signal Filtering: Use software filtering techniques to smooth out noise in the analog signal.
Example Code for Arduino UNO
Below is an example code snippet to read data from the DFRobot Dust Sensor Adapter Gravity using an Arduino UNO:
// Define the analog pin connected to the Signal pin of the adapter
const int dustSensorPin = A0;
void setup() {
// Initialize serial communication for debugging
Serial.begin(9600);
}
void loop() {
// Read the analog value from the dust sensor
int sensorValue = analogRead(dustSensorPin);
// Convert the analog value to a voltage (0-5V)
float voltage = sensorValue * (5.0 / 1023.0);
// Print the voltage to the Serial Monitor
Serial.print("Dust Sensor Voltage: ");
Serial.print(voltage);
Serial.println(" V");
// Add a delay for stability
delay(1000);
}
Notes on the Code
- The
analogRead()function reads the signal from the dust sensor. - The voltage is calculated by scaling the analog reading to the 0-5V range.
- Use the Serial Monitor to observe the output voltage, which corresponds to dust concentration.
Troubleshooting and FAQs
Common Issues and Solutions
No Signal Output
- Cause: Loose or incorrect connections.
- Solution: Double-check all connections between the dust sensor, adapter, and microcontroller.
Fluctuating Readings
- Cause: Electrical noise or unstable power supply.
- Solution: Use a decoupling capacitor (e.g., 0.1µF) across the VCC and GND pins to stabilize the power supply.
Incorrect Voltage Readings
- Cause: Calibration issues or incorrect ADC reference voltage.
- Solution: Verify the calibration of the dust sensor and ensure the microcontroller's ADC reference voltage matches the expected range.
Adapter Overheating
- Cause: Excessive current draw or incorrect power supply.
- Solution: Ensure the power supply is 5V DC and does not exceed the adapter's specifications.
FAQs
Q: Can I use this adapter with non-DFRobot dust sensors?
A: While the adapter is designed for DFRobot dust sensors, it may work with other sensors that have a similar interface. Verify compatibility before use.
Q: How do I interpret the voltage output from the adapter?
A: The output voltage is proportional to the dust concentration. Refer to the dust sensor's datasheet for the specific voltage-to-concentration mapping.
Q: Is the adapter compatible with 3.3V microcontrollers?
A: The adapter requires a 5V power supply, but the Signal pin output can often be read by 3.3V microcontrollers. Check your microcontroller's ADC input voltage range to confirm compatibility.
Q: Can I extend the cable length between the adapter and the microcontroller?
A: Yes, but longer cables may introduce signal noise. Use shielded cables or add filtering if necessary.
This documentation provides all the necessary details to get started with the DFRobot Dust Sensor Adapter Gravity. For further assistance, refer to the official DFRobot documentation or community forums.