How to Use huskylense: Examples, Pinouts, and Specs
Introduction
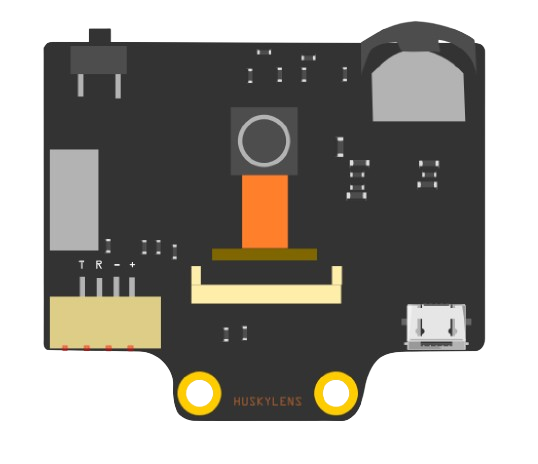
The HuskyLens is an easy-to-use AI camera module that provides powerful machine learning capabilities to any project. It is designed to interface with microcontrollers such as the Arduino UNO, enabling applications in robotics, automation, and interactive art. With its ability to perform tasks such as facial recognition, object tracking, and color detection, the HuskyLens is a versatile component for hobbyists and professionals alike.
Explore Projects Built with huskylense
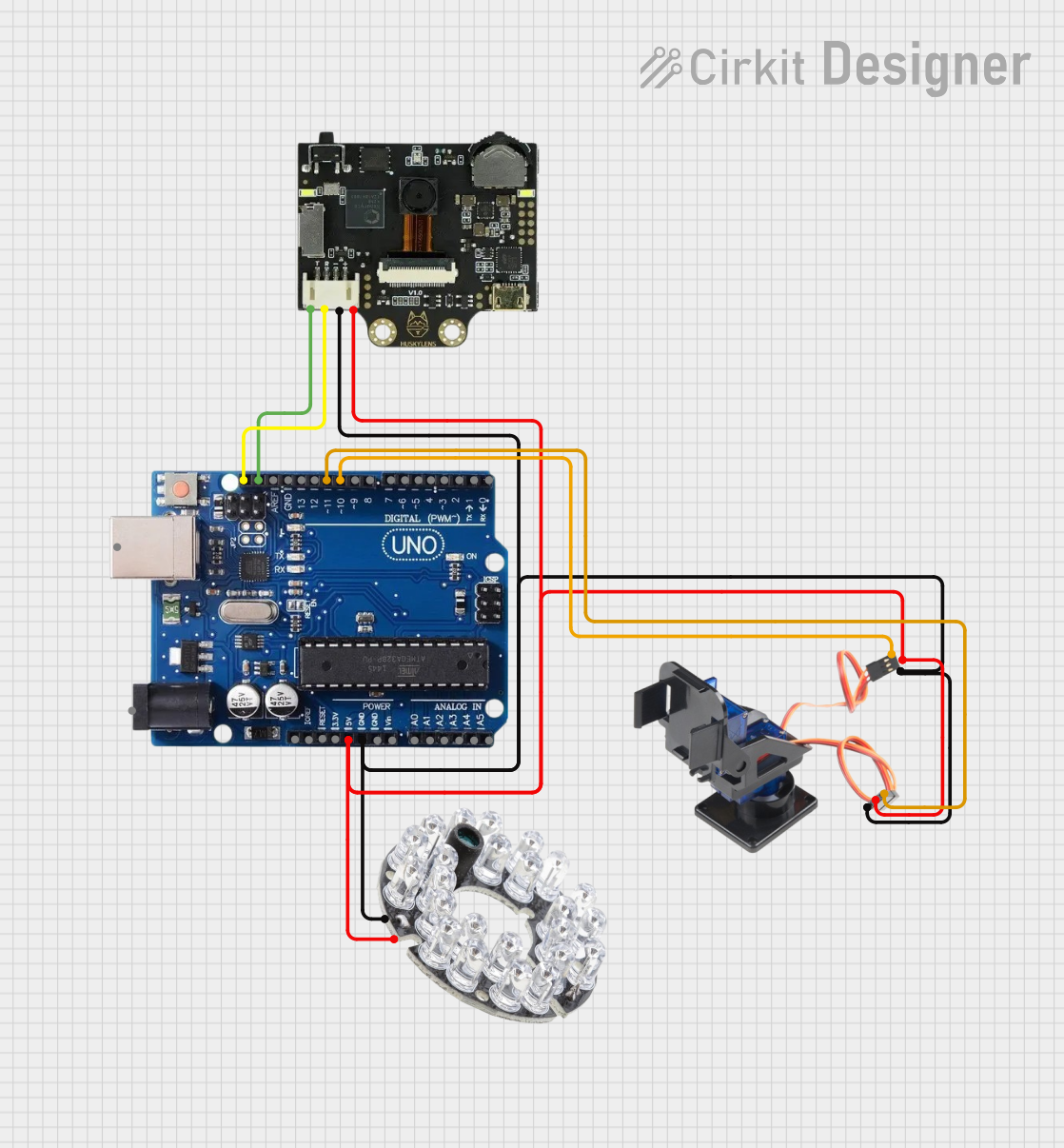
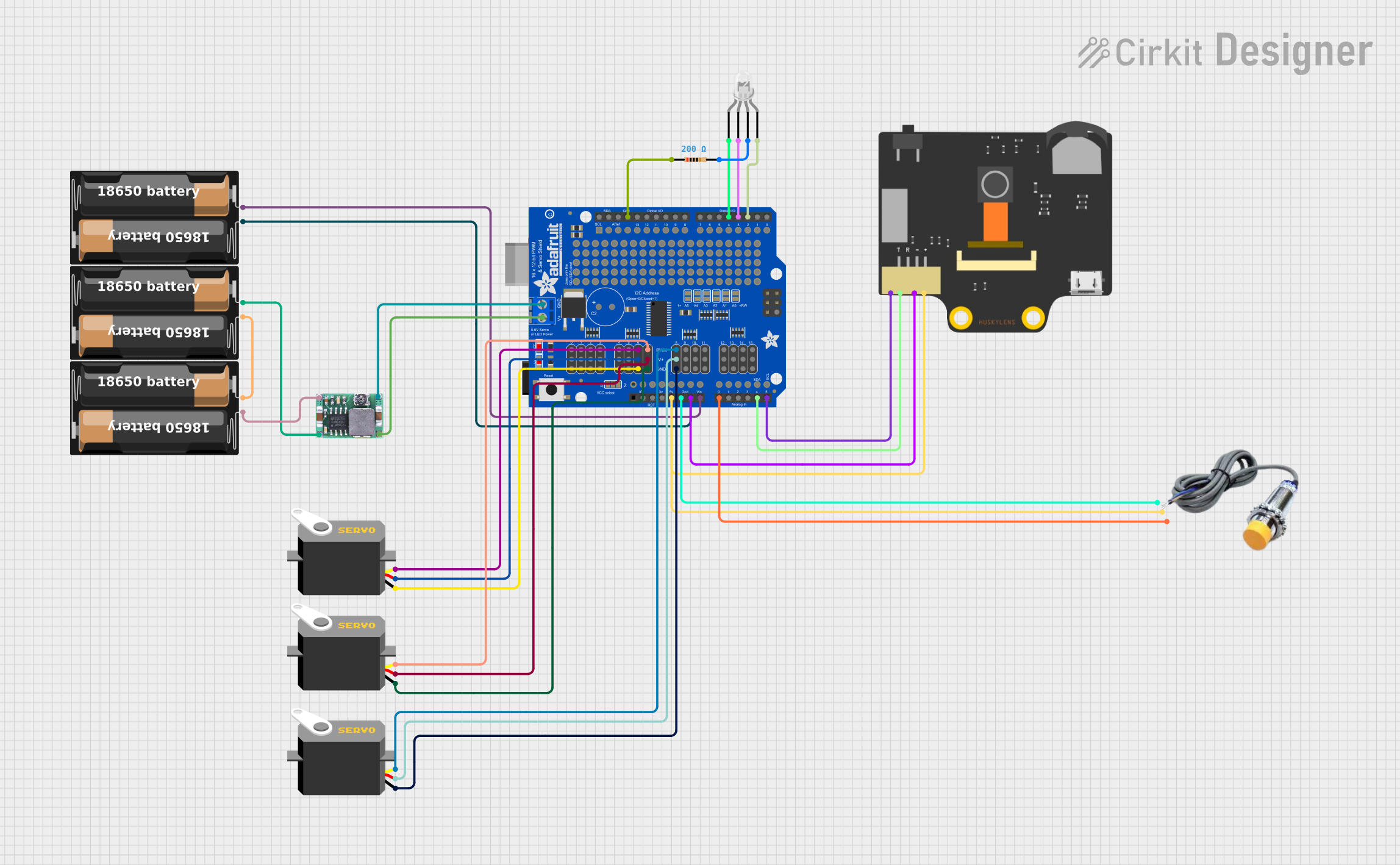
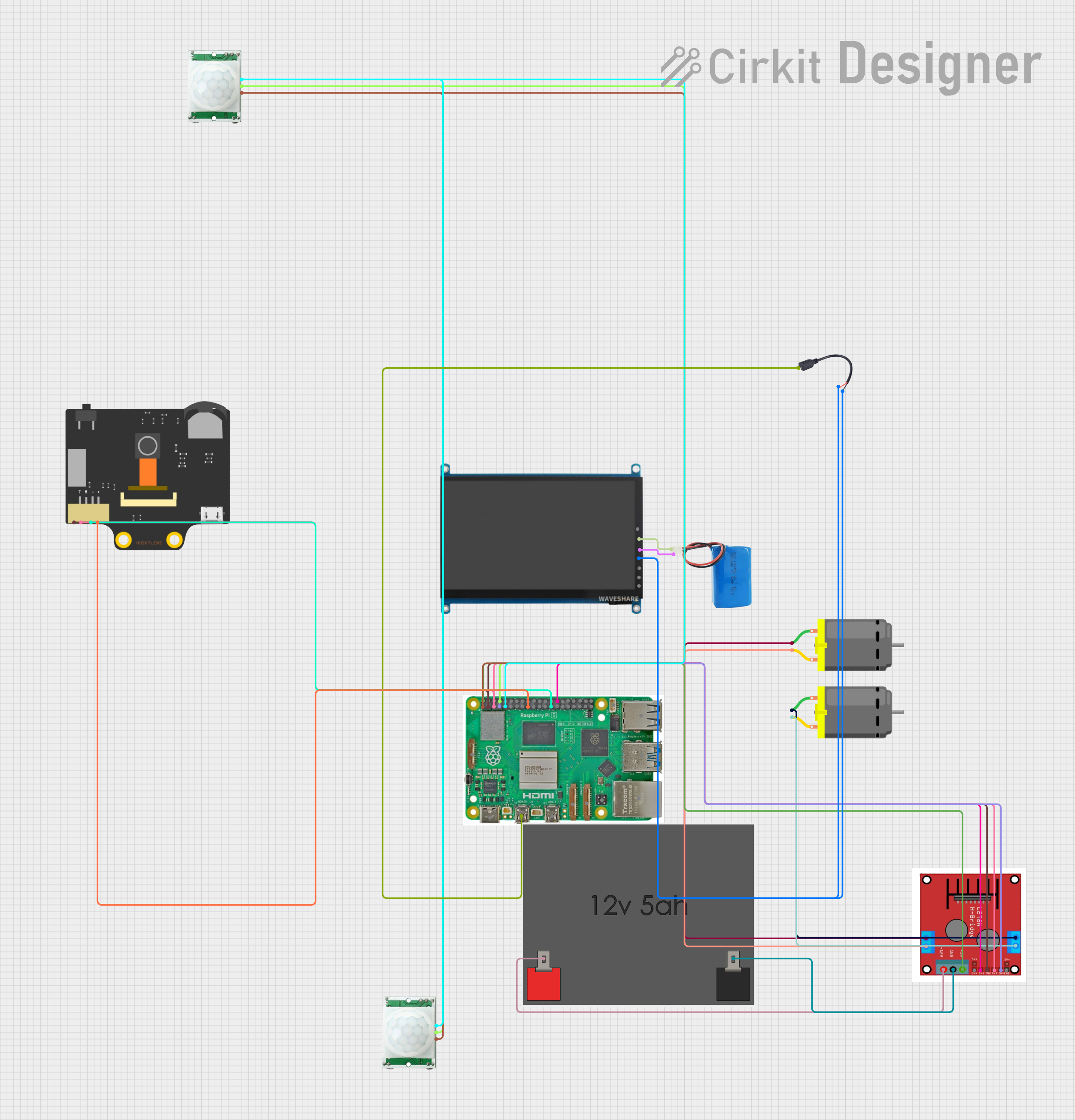
Explore Projects Built with huskylense
Common Applications and Use Cases
- Robotics: Object tracking and avoidance, gesture control
- Interactive installations: Audience engagement through gesture and face recognition
- Educational projects: Introducing AI and machine learning concepts
- DIY electronics: Adding vision capabilities to custom builds
Technical Specifications
Key Technical Details
- Processor: Kendryte K210
- Input Voltage: 3.3V to 5V
- Interface: I2C, UART
- Lens: Wide-angle lens
- Resolution: 320x240 to 224x224
- Frame Rate: Up to 30 frames per second
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V to 5V) |
| 2 | GND | Ground connection |
| 3 | TX | UART transmit |
| 4 | RX | UART receive |
| 5 | SCL | I2C clock |
| 6 | SDA | I2C data |
Usage Instructions
How to Use the HuskyLens in a Circuit
- Powering the HuskyLens: Connect the VCC pin to a 3.3V or 5V power supply and the GND pin to the ground.
- Data Communication: Choose between UART or I2C for communication.
- For UART, connect the TX and RX pins to the corresponding RX and TX pins on the microcontroller.
- For I2C, connect the SCL and SDA pins to the microcontroller's I2C pins.
- Lens Adjustment: Before powering on, adjust the focus of the lens by rotating it to ensure clear image capture.
Important Considerations and Best Practices
- Ensure the power supply is within the specified voltage range to prevent damage.
- Use pull-up resistors on the I2C lines if they are not built into the microcontroller.
- When using UART, ensure that the baud rates of HuskyLens and the microcontroller match.
- Regularly update the firmware of HuskyLens for optimal performance.
Troubleshooting and FAQs
Common Issues Users Might Face
- Blurry Images: Adjust the focus of the lens until the image is clear.
- Communication Errors: Verify the wiring, ensure correct baud rate for UART, and check for proper I2C pull-up resistors.
- Power Issues: Confirm that the power supply is within the acceptable range and that connections are secure.
Solutions and Tips for Troubleshooting
- If the HuskyLens is not recognized by the microcontroller, double-check the connection and the code for initializing the camera.
- For unclear images, clean the lens with a soft, dry cloth to remove any fingerprints or dust.
- In case of persistent issues, consult the HuskyLens forums and community for support.
Example Code for Arduino UNO
#include <SoftwareSerial.h>
#include "HUSKYLENS.h"
SoftwareSerial huskyLensSerial(2, 3); // RX, TX
HUSKYLENS huskyLens;
void setup() {
huskyLensSerial.begin(9600);
huskyLens.begin(huskyLensSerial);
Serial.begin(9600);
}
void loop() {
if (!huskyLens.request()) {
Serial.println("Failed to request data from HUSKYLENS, check the connection!");
} else {
while (huskyLens.available()) {
// Print result if object is recognized
HUSKYLENSResult result = huskyLens.read();
if (result.command == COMMAND_RETURN_BLOCK) {
Serial.print("ID: ");
Serial.print(result.id);
Serial.print(" X Center: ");
Serial.print(result.xCenter);
Serial.print(" Y Center: ");
Serial.println(result.yCenter);
}
}
}
}
Note: This example assumes the use of the SoftwareSerial library to communicate with the HuskyLens. Adjust the pin numbers in the SoftwareSerial huskyLensSerial(2, 3); line to match your setup.
Remember to keep code comments concise and within the 80 character line length limit. Wrap comments as needed for clarity and readability.